Comparison of Tesla Coil Driver Topologies: Rotary Spark Gap Versus Double Resonant Solid State
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mutual Inductance and Transformer Theory Questions: 1 Through 15 Lab Exercise: Transformer Voltage/Current Ratios (Question 61)
ELTR 115 (AC 2), section 1 Recommended schedule Day 1 Topics: Mutual inductance and transformer theory Questions: 1 through 15 Lab Exercise: Transformer voltage/current ratios (question 61) Day 2 Topics: Transformer step ratio Questions: 16 through 30 Lab Exercise: Auto-transformers (question 62) Day 3 Topics: Maximum power transfer theorem and impedance matching with transformers Questions: 31 through 45 Lab Exercise: Auto-transformers (question 63) Day 4 Topics: Transformer applications, power ratings, and core effects Questions: 46 through 60 Lab Exercise: Differential voltage measurement using the oscilloscope (question 64) Day 5 Exam 1: includes Transformer voltage ratio performance assessment Lab Exercise: work on project Project: Initial project design checked by instructor and components selected (sensitive audio detector circuit recommended) Practice and challenge problems Questions: 66 through the end of the worksheet Impending deadlines Project due at end of ELTR115, Section 3 Question 65: Sample project grading criteria 1 ELTR 115 (AC 2), section 1 Project ideas AC power supply: (Strongly Recommended!) This is basically one-half of an AC/DC power supply circuit, consisting of a line power plug, on/off switch, fuse, indicator lamp, and a step-down transformer. The reason this project idea is strongly recommended is that it may serve as the basis for the recommended power supply project in the next course (ELTR120 – Semiconductors 1). If you build the AC section now, you will not have to re-build an enclosure or any of the line-power circuitry later! Note that the first lab (step-down transformer circuit) may serve as a prototype for this project with just a few additional components. -
Zilano Design for "Reverse Tesla Coil" Free Energy Generator
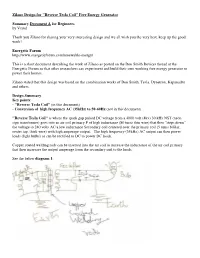
Zilano Design for "Reverse Tesla Coil" Free Energy Generator Summary Document A for Beginners by Vrand Thank you Zilano for sharing your very interesting design and we all wish you the very best, keep up the good work! Energetic Forum http://www.energeticforum.com/renewable-energy/ This is a short document describing the work of Zilano as posted on the Don Smith Devices thread at the Energetic Forum so that other researchers can experiment and build their own working free energy generator to power their homes. Zilano stated that this design was based on the combination works of Don Smith, Tesla, Dynatron, Kapanadze and others. Design Summary Key points : - "Reverse Tesla Coil" (in this document) - Conversion of high frequency AC (35kHz) to 50-60Hz (not in this document) "Reverse Tesla Coil" is where the spark gap pulsed DC voltage from a 4000 volt (4kv) 30 kHz NST (neon sign transformer) goes into an air coil primary P of high inductance (80 turns thin wire) that then "steps down" the voltage to 240 volts AC a low inductance Secondary coil centered over the primary coil (5 turns bifilar, center tap, thick wire) with high amperage output. The high frequency (35kHz) AC output can then power loads (light bulbs) or can be rectified to DC to power DC loads. Copper coated welding rods can be inserted into the air coil to increase the inductance of the air coil primary that then increases the output amperage from the secondary coil to the loads. See the below diagram 1 : Parts List - NST 4KV 20-35KHZ - D1 high voltage diode - SG1 SG2 spark gaps - C1 primary tuning HV capacitor - P Primary of air coil, on 2" PVC tube, 80 turns of 6mm wire - S Secondary 3" coil over primary coil, 5 turns bifilar (5 turns CW & 5 turns CCW) of thick wire (up to 16mm) with center tap to ground. -
LTC3723-1/LTC3723-2 Synchronous Push-Pull PWM Controllers
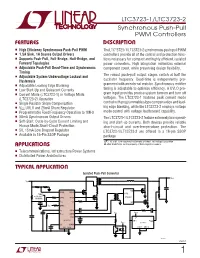
LTC3723-1/LTC3723-2 Synchronous Push-Pull PWM Controllers FEATURES DESCRIPTIO U ■ High Efficiency Synchronous Push-Pull PWM The LTC®3723-1/LTC3723-2 synchronous push-pull PWM ■ 1.5A Sink, 1A Source Output Drivers controllers provide all of the control and protection func- ■ Supports Push-Pull, Full-Bridge, Half-Bridge, and tions necessary for compact and highly efficient, isolated Forward Topologies power converters. High integration minimizes external ■ Adjustable Push-Pull Dead-Time and Synchronous component count, while preserving design flexibility. Timing The robust push-pull output stages switch at half the ■ Adjustable System Undervoltage Lockout and Hysteresis oscillator frequency. Dead-time is independently pro- ■ Adjustable Leading Edge Blanking grammed with an external resistor. Synchronous rectifier ■ Low Start-Up and Quiescent Currents timing is adjustable to optimize efficiency. A UVLO pro- ■ Current Mode (LTC3723-1) or Voltage Mode gram input provides precise system turn-on and turn off (LTC3723-2) Operation voltages. The LTC3723-1 features peak current mode ■ Single Resistor Slope Compensation control with programmable slope compensation and lead- ■ ing edge blanking, while the LTC3723-2 employs voltage VCC UVLO and 25mA Shunt Regulator ■ Programmable Fixed Frequency Operation to 1MHz mode control with voltage feedforward capability. ■ 50mA Synchronous Output Drivers The LTC3723-1/LTC3723-2 feature extremely low operat- ■ Soft-Start, Cycle-by-Cycle Current Limiting and ing and start-up currents. Both devices provide reliable Hiccup Mode Short-Circuit Protection short-circuit and overtemperature protection. The ■ 5V, 15mA Low Dropout Regulator LTC3723-1/LTC3723-2 are offered in a 16-pin SSOP ■ Available in 16-Pin SSOP Package package. -

Flux-Balance Control for LLC Resonant Converters with Center-Tapped Transformers
energies Article Flux-Balance Control for LLC Resonant Converters with Center-Tapped Transformers Yuan-Chih Lin, Ding-Tang Chen and Ching-Jan Chen * Department of Electrical Engineering, National Taiwan University, Taipei, Taiwan; No. 1, Sec. 4, Roosevelt Rd., Taipei 10617, Taiwan * Correspondence: [email protected]; Tel.: +886-2-3366-3366 (ext. 348) Received: 9 July 2019; Accepted: 19 August 2019; Published: 21 August 2019 Abstract: LLC resonant converters with center-tapped transformers are widely used. However, these converters suffer from a flux walking issue, which causes a larger output ripple and possible transformer saturation. In this paper, a flux-balance control strategy is proposed for resolving the flux walking issue. First, the DC magnetizing current generated due to the mismatched secondary-side leakage inductances, and its effects on the voltage gain are analyzed. From the analysis, the flux-balance control strategy, which is based on the original output-voltage control loop, is proposed. Since the DC magnetizing current is not easily measured, a current sensing strategy with a current estimator is proposed, which only requires one current sensor and is easy to estimate the DC magnetizing current. Finally, a simulation scheme and a hardware prototype with rated output power 200 W, input voltage 380 V, and output voltage 20 V is constructed for verification. The simulation and experimental results show that the proposed control strategy effectively reduces the DC magnetizing current and output voltage ripple at mismatched condition. Keywords: LLC resonant converter; center-tapped transformer; flux walking; flux-balance control loop; magnetizing current estimation 1. Introduction The LLC resonant converter is widely used in many different applications such as onboard chargers, server power systems, laptops, desktops, photovoltaic regeneration systems. -

THE ULTIMATE Tesla Coil Design and CONSTRUCTION GUIDE the ULTIMATE Tesla Coil Design and CONSTRUCTION GUIDE
THE ULTIMATE Tesla Coil Design AND CONSTRUCTION GUIDE THE ULTIMATE Tesla Coil Design AND CONSTRUCTION GUIDE Mitch Tilbury New York Chicago San Francisco Lisbon London Madrid Mexico City Milan New Delhi San Juan Seoul Singapore Sydney Toronto Copyright © 2008 by The McGraw-Hill Companies, Inc. All rights reserved. Manufactured in the United States of America. Except as permitted under the United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a database or retrieval system, without the prior written permission of the publisher. 0-07-159589-9 The material in this eBook also appears in the print version of this title: 0-07-149737-4. All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after every occurrence of a trademarked name, we use names in an editorial fashion only, and to the benefit of the trademark owner, with no intention of infringement of the trademark. Where such designations appear in this book, they have been printed with initial caps. McGraw-Hill eBooks are available at special quantity discounts to use as premiums and sales promotions, or for use in corporate training programs. For more information, please contact George Hoare, Special Sales, at [email protected] or (212) 904-4069. TERMS OF USE This is a copyrighted work and The McGraw-Hill Companies, Inc. (“McGraw-Hill”) and its licensors reserve all rights in and to the work. Use of this work is subject to these terms. Except as permitted under the Copyright Act of 1976 and the right to store and retrieve one copy of the work, you may not decompile, disassemble, reverse engineer, reproduce, modify, create derivative works based upon, transmit, distribute, disseminate, sell, publish or sublicense the work or any part of it without McGraw-Hill’s prior consent. -

Instruction Manual Installation Operation Copyright © 2012 Kato Engineering, Inc
Instruction Manual Installation Operation Copyright © 2012 Kato Engineering, Inc. All rights reserved Maintenance Motor-Generator Set Synchronous Common Shaft Publication 350-03006-00 (07/18/2012) Kato Engineering, Inc. | P.O. Box 8447 | Mankato, MN USA 56002-8447 | Tel: 507-625-4011 [email protected] | www.KatoEngineering.com | Fax: 507-345-2798 Copyright © 2012 Kato Engineering, Inc. All rights reserved Page 1 Table of Contents Introduction............................................................................... 4 Foreword..................................................................................... 4 Safety instructions.......................................................................4 Ratings/description......................................................................4 Construction and Operating Principles.................................. 5 Stator...........................................................................................5 Rotor........................................................................................... 5 Brushless exciters....................................................................... 6 Installation................................................................................. 7 Receiving inspection................................................................... 7 Unpacking and moving............................................................... 7 Location...................................................................................... 7 Mounting.................................................................................... -

Simple, Compact Source for Low-Temperature Air Plasmas
University of South Carolina Scholar Commons Faculty Publications Biological Sciences, Department of 7-25-2002 Simple, Compact Source for Low-Temperature Air Plasmas D. P. Sheehan University of San Diego J. Lawson University of San Diego M. Sosa University of San Diego Richard A. Long University of South Carolina - Columbia, [email protected] Follow this and additional works at: https://scholarcommons.sc.edu/biol_facpub Part of the Biology Commons Publication Info Review of Scientific Instruments, Volume 73, Issue 8, 2002, pages 3128-3130. © Review of Scientific Instruments 2002, The American Institute of Physics. This Article is brought to you by the Biological Sciences, Department of at Scholar Commons. It has been accepted for inclusion in Faculty Publications by an authorized administrator of Scholar Commons. For more information, please contact [email protected]. REVIEW OF SCIENTIFIC INSTRUMENTS VOLUME 73, NUMBER 8 AUGUST 2002 Simple, compact source for low-temperature air plasmas D. P. Sheehan,a) J. Lawson, and M. Sosa Physics Department, University of San Diego, San Diego, California 92110 R. A. Long Scripps Institute of Oceanography, UCSD, La Jolla, California ͑Received 14 August 2001; accepted for publication 8 May 2002͒ A simple, compact source of low-temperature, spatially and temporally uniform air plasma using a Telsa induction coil driver is described. The low-power ionization discharge plasma is localized (2 cmϫ0.5 cmϫ0.1 cm) and essentially free of arc channels. A Teflon coated rolling cylindrical electrode and dielectric coated ground plate are essential to the source’s operation and allow flat test samples to be readily exposed to the plasma. -

Current Transformer Theory & Testing
Current Transformer Theory & Testing Hands On Relay School 2016 Jay Anderson – Omicron [email protected] www.OmicronEnergy.com Agenda • Introduction • Current Transformer Basics • Construction & Types • Industry Standards • Applications • Testing Current Transformer Basics © OMICRON Page 3 Function of Current Transformers • Convert Primary Power Signals to Manageable Values for • Indicating Meters • Revenue Metering • Protective Relay Systems • Power Generation • Plant Monitoring Systems • Fault Recorders • SCADA • Overall Electric Grid Monitoring (Local Dispatch & ISO Level) • Building (Energy) Management Systems (HVAC,refrigeration...) • Load Control January 19, 2016 Page: 4 Current Transformers • Insulation from High Voltages and Currents • Isolation from other systems • Safety • Standardization • Accuracy ( Ratio & Phase) • Typically Low Power Rating • Thermal Considerations • Burden Considerations January 19, 2016 Page: 5 Current Transformers • Insulation Consistent With Voltage Use • Wide Range of Current to Replicate (Unlike VTs) • Metering or Protective Class Ratings • Typically Unprotected • Dangerous When Open Circuited January 19, 2016 Page: 6 Compliance & Standards Instrument Transformers Are Expected to Perform & Conform IEEE ANSI IEC in Europe & Asia NERC Reliability Standards in US Supported standards • IEEE C57.13 standard requirements for instrument transformers • IEEE C57.13.6 standard for high-accuracy instrument transformers • IEC 60044-1 current transformers • IEC 60044-6 requirements for protective current -

Feasibility Study on the Use of Fast Camera and Recording in Time-Domain to Characterize ESD
MATEC Web of Conferences 247, 00028 (2018) https://doi.org/10.1051/matecconf/201824700028 FESE 2018 Feasibility study on the use of fast camera and recording in time-domain to characterize ESD Szymon Ptak1,*, Albert Smalcerz1, Piotr Ostrowski1 1Central Institute for Labour Protection – National Research Institute, 16 Czerniakowska St., 00-701 Warsaw, Poland Abstract. Fire and explosion protection in industrial conditions requires multidimensional approach. Usually the risk of hazardous zone creation is unavoidable, if the combustible material is processed. Therefore controlling of potential ignition sources is introduced. One of most popular sources of ignition is electrostatic discharge. Depending on the type of the discharge, as well as on exact discharge conditions, energy released might reach hundreds or even thousands of mJ, being able to ignite most of gaseous or dust-air hazardous mixtures. A dedicated methodology was created to record the discharge with fast camera with maximum speed of 1M fps and with the oscilloscope up to 25 GS/s. Dedicated test stand allows to obtain high voltage to create the conditions for electrostatic discharge. The aim of presented research was to analyze the course of electrostatic spark discharge in laboratory conditions and to place the outcomes in the context of explosion safety in the industrial conditions. The course of electrostatic discharge is dependent on various conditions: the polarity, distance between the electrodes, shape of electrodes, grounding conditions, etc. Understanding of the phenomenon is crucial from the point of view of explosion safety. 1 Introduction In every industrial process the safety of people, equipment and environment must be ensured. Despite the safety of the process itself, the risk of fire and/or explosion should be always taken into consideration. -

Published Articles Balun Modeling for Differential Amplifiers
Proceedings of the World Congress on Engineering and Computer Science 2019 WCECS 2019, October 22-24, 2019, San Francisco, USA Balun Modeling for Differential Amplifiers Kun Chen, Zheng Liu, Xuelin Hong, Ruinan Chang, and Weimin Sun Abstract—This work proposes an improved lumped element model. Particular for this core is an additional element which model for accurately characterizing transformer based baluns. will be shown later to play a critical role in modeling The model can accurately describe balun behaviors for both common mode behavior. Section III will derive the formulae differential and common modes. Lumped elements extraction from Y parameter is presented, and the relationship between for extracting the model elements from the Y parameter. In the proposed model and the classic compact transformer model Section IV, the differential, common and divider modes will is derived. Numerical results will be presented to validate the be analyzed separately, where we will justify the addition of accuracy of the proposed model. the extra element in the transformer core. Section V will Index Terms—balun modeling, transformer modeling, push- discuss the relationship of the proposed transformer core pull amplifiers, power amplifier (PA), compact model, differen- model with the popular compact model that is based on ideal tial mode, common mode, mutual inductance. transformers and leakage and magnitization inductances. Section VI will discuss the physics and modeling of the I. INTRODUCTION common mode mutual inductance. And in Section VII, some RANSFORMERS are important passive components straight-forward adaptations of the transformer core for more T which have various applications such as broadband accurate modeling of actual transformer baluns, followed by impedance matching, power combining and dividing. -

Explosive Safety with Regards to Electrostatic Discharge Francis Martinez
University of New Mexico UNM Digital Repository Electrical and Computer Engineering ETDs Engineering ETDs 7-12-2014 Explosive Safety with Regards to Electrostatic Discharge Francis Martinez Follow this and additional works at: https://digitalrepository.unm.edu/ece_etds Recommended Citation Martinez, Francis. "Explosive Safety with Regards to Electrostatic Discharge." (2014). https://digitalrepository.unm.edu/ece_etds/ 172 This Thesis is brought to you for free and open access by the Engineering ETDs at UNM Digital Repository. It has been accepted for inclusion in Electrical and Computer Engineering ETDs by an authorized administrator of UNM Digital Repository. For more information, please contact [email protected]. Francis J. Martinez Candidate Electrical and Computer Engineering Department This thesis is approved, and it is acceptable in quality and form for publication: Approved by the Thesis Committee: Dr. Christos Christodoulou , Chairperson Dr. Mark Gilmore Dr. Youssef Tawk i EXPLOSIVE SAFETY WITH REGARDS TO ELECTROSTATIC DISCHARGE by FRANCIS J. MARTINEZ B.S. ELECTRICAL ENGINEERING NEW MEXICO INSTITUTE OF MINING AND TECHNOLOGY 2001 THESIS Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science In Electrical Engineering The University of New Mexico Albuquerque, New Mexico May 2014 ii Dedication To my beautiful and amazing wife, Alicia, and our perfect daughter, Isabella Alessandra and to our unborn child who we are excited to meet and the one that we never got to meet. This was done out of love for all of you. iii Acknowledgements Approximately 6 years ago, I met Dr. Christos Christodoulou on a collaborative project we were working on. He invited me to explore getting my Master’s in EE and he told me to call him whenever I decided to do it. -

Wireless Interconnect Using Inductive Coupling in 3D-Ics by Sang Wook
Wireless Interconnect using Inductive Coupling in 3D-ICs by Sang Wook Han A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Electrical Engineering) in The University of Michigan 2012 Doctoral Committee: Assistant Professor David D. Wentzloff, Chair Professor David Blaauw Professor Karl Grosh Professor John Patrick Hayes TABLE OF CONTENTS LIST OF FIGURES ...................................................................................................... iv LIST OF TABLES ...................................................................................................... viii LIST OF APPENDICES ............................................................................................... ix Chapter I. Introduction ............................................................................................... 1 I.1 3DIC ................................................................................................................. 4 I.2 Through-Silicon-Vias ....................................................................................... 7 I.3 Capacitive Coupling ......................................................................................... 8 I.4 Inductive Coupling ......................................................................................... 10 I.4.1 ... Inductive Data Link ................................................................................. 12 I.4.2 ... Inductive Power Link .............................................................................