A Seminar Report Hybrid Synergy Drive
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RAV4 Hybrid Gasoline-Electric Hybrid Synergy Drive
RAV4 Hybrid Gasoline-Electric Hybrid Synergy Drive AVA4 2 /AVA4 4 S eries Foreword This guide was developed to educate and assist dismantlers in the safe handling of Toyota RAV4 Hybrid gasoline-electric hybrid vehicles. RAV4 Hybrid dismantling procedures are similar to other non-hybrid Toyota vehicles with the exception of the high voltage electrical system. It is important to recognize and understand the high voltage electrical system features and specifications of the Toyota RAV4 Hybrid, as they may not be familiar to dismantlers. High voltage electricity powers the A/C compressor, electric motors, generator, and inverter/converter. All other conventional automotive electrical devices such as the head lights, radio, and gauges are powered from a separate 12 V auxiliary battery. Numerous safeguards have been designed into the RAV4 Hybrid to help ensure the high voltage, approximately 244.8 V, Nickel Metal Hydride (NiMH) Hybrid Vehicle (HV) battery pack is kept safe and secure in an accident. The NiMH HV battery pack contains sealed batteries that are similar to rechargeable batteries used in some battery operated power tools and other consumer products. The electrolyte is absorbed in the cell plates and will not normally leak out even if the battery is cracked. In the unlikely event the electrolyte does leak, it can be easily neutralized with a dilute boric acid solution or vinegar. High voltage cables, identifiable by orange insulation and connectors, are isolated from the metal chassis of the vehicle. Additional topics contained in the guide include: • Toyota RAV4 Hybrid identification. • Major hybrid component locations and descriptions. By following the information in this guide, dismantlers will be able to handle RAV4 Hybrid hybrid- electric vehicles as safely as the dismantling of a conventional gasoline engine automobile. -

The Lexus Range Experience Amazing
THE LEXUS RANGE EXPERIENCE AMAZING Since the launch of the LS 400 sedan in 1989, Lexus has become a synonym for exceptional quality and incredibly refined luxury cars. Determined to offer more than this, recently we’ve launched a new generation of vehicles: cars that stand out from the crowd and defy convention. Models like the exciting new UX compact crossover and the provocative yet elegant ES executive sedan. Based on a uniquely Japanese aesthetic of harmony without compromise, Lexus design is now more distinctive and single-minded than ever. However, head turning looks would be nothing without incredible performance. Inspired by the iconic Lexus LFA supercar that was launched in 2010, our ‘Master Drivers’, have worked tirelessly to identify and articulate the unique flavour of driving excitement. With this hard won knowledge we’ve now enhanced the precise and elegant nature of every Lexus with a sizeable dose of adrenaline: creating an exhilarating new driving experience that starts when you approach a car like the LC luxury coupé, and continues as long as you drive and cherish it. Unsurprisingly, technology plays a huge role in our work. We see innovation as a never-ending process, and are committed to anticipating future needs and desires. This approach has led to major automotive breakthroughs like the world’s first Self-Charging Hybrid in 2004 – the RX 400h – and now Multi Stage Hybrid that powers the LS 500h and LC 500h. Despite our intense focus on the future, we’re immensely proud of the world-class build quality of our cars, which is overseen by our ‘Takumi’ artisans. -
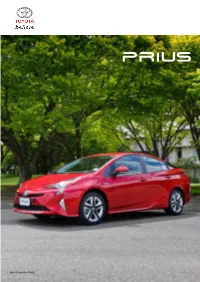
PRIUS ZR in PURSUIT RED Changing the World, One Driveway at a Time
PRIUS ZR IN PURSUIT RED Changing the world, one driveway at a time When it arrived on the world stage almost 20 years ago, the Prius redefined what was possible in an everyday passenger car. It signalled the beginning of a new movement; one that strove to combine performance and practicality with a greater emphasis on both economy and the environment. Today, after more than 8 million sales globally, the Prius remains Toyota’s hallmark hybrid car. Featuring a dynamic, cutting-edge exterior design, an impressive array of standard technology and a high level of comfort and convenience onboard, the Prius is also more fuel efficient and more fun to drive than ever before. Continuing to push the boundaries of development and design, the evolution of the Prius is a true technological adventure worth taking. Come with us and see for yourself. PRIUS ZR 1.8L PETROL / HYBRID ECVT Prius ZR The distinctive stance and technological prowess of the Prius ZR is accentuated by its dynamic, modern exterior looks. Dramatic LED headlights and taillights, high contrast alloy wheels and a smooth, low-slung silhouette create 1 a striking impression. The Prius ZR features a premium interior that combines practical space and versatility with cutting-edge technologies, such as Toyota’s intelligent S-Flow air conditioning system and the Qi wireless charging tray for compatible devices. The stylish wrap-around dashboard, centrally housed instrumentation, colour Head-Up Display information 3 4 system and supportive seats all serve to improve visibility, ease-of-use and driver and passenger comfort. There remains nothing quite like a Prius, where form 5 meets function with a dash of fashion. -

Gasoline-Electric Hybrid Synergy Drive
Gasoline-Electric Hybrid Synergy Drive AHV40 Series Foreword In March 2006, Toyota released the Toyota CAMRY gasoline-electric hybrid vehicle in North America. Except where noted in this guide, basic vehicle systems and features for the CAMRY hybrid are the same as those on the conventional, non-hybrid, Toyota CAMRY. To educate and assist emergency responders in the safe handling of the CAMRY hybrid technology, Toyota published this CAMRY hybrid Emergency Response Guide. High voltage electricity powers the electric motor, generator, A/C compressor, and inverter/converter. All other automotive electrical devices such as the headlights, power steering, horn, radio, and gauges are powered from a separate 12 Volts battery. Numerous safeguards have been designed into the CAMRY to help ensure the high voltage, approximately 245 Volts, Nickel Metal Hydride (NiMH) Hybrid Vehicle (HV) battery pack is kept safe and secure in an accident. Additional topics contained in the guide include: N Toyota CAMRY identification. N Major hybrid component locations and descriptions. By following the information in this guide, dismantlers will be able to handle the CAMRY hybrid-electric vehicle as safely as the dismantling of a conventional gasoline engine automobile. ¤ 2006 Toyota Motor Corporation All rights reserved. This book may not be reproduced or copied, in whole or in part, without the written permission of Toyota Motor Corporation ii Table of Contents About the CAMRY.........................................................................................................................1 -

Electric Drive in America Market Overview
Advancing the Deployment of Electric Vehicles: Market and Policy Outlook for Electrifying Transportation Genevieve Cullen, Vice President, EDTA December 6, 2011 Market Outlook • Late 2010, GM Volt & Nissan Leaf first mass-market plug-in electric vehicles • ~ 20 plug-in EV models expected by the end of 2012, including plug- in Prius hybrid, battery electric Ford Focus • National and regional charging infrastructure beings installed rapidly. Projected cumulative investment of $5-10 billion by 2015 Sales • The total number of plug-in vehicles (including plug-in hybrids and battery EVs) sold in August 2012 was 4,715. – OVER PREVIOUS MONTH: 56.3% increase • 3,016 sold in July 2012. – OVER THIS MONTH LAST YEAR: 183.2% increase • 1,665 sold in August 2011. • There have been 25,290 total plug-ins (including plug-in hybrids and battery EVs) sold in 2012. This is a 170.5% increase over this time last year. Vehicles Available Now Battery Electric Vehicles Fuel Cell Electric Vehicles AMP Mle BMW Hydrogen 7* Coda Sedan Honda FCX Clarity* Ford Transit Connect Electric Mercedes-Benz B-Class* Ford Focus BEV Honda Fit EV Mitsubishi i-MiEV Nissan LEAF Smart fortwo EV Tesla Model S Plug-In Hybrids Chevrolet Volt Fisker Karma Toyota Prius Plug-In Hybrid Via Motors Vtrux Updated October 1, 2012 * Limited R Vehicles Available Now Hybrid Electric Vehicles Lexus CT 200h Acura ILX Lexus HS 250h BMW ActiveHybrid 7L Lexus LS 600h L Buick Regal eAssist Lexus RX 450h Cadillac Escalade Hybrid Lincoln MKZ Hybrid Chevrolet Malibu Hybrid Mercedes-Benz ML450 Hybrid Chevrolet -
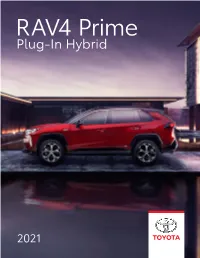
Plug-In Hybrid
RAV4 Prime Plug-In Hybrid 2021 CLICK BELOW TO Contents NAVIGATE SECTIONS. Introduction Exterior Design Interior Styling Technology Performance Safety Specifications & Features XSE SE XSE TECHNOLOGY PACKAGE Accessories Warranty 2021 RAV4 PRIME INTRODUCING THE 2021 RAV4 PRIME The most electrifying RAV4 ever made. Experience the power of plugging in. Meet the first ever RAV4 plug-in-hybrid - our most powerful RAV4 yet, with an advanced plug-in hybrid powertrain that generates 302 net horsepower. Best of all, you can choose to plug it in, gas it up, or both. And with the added benefit of Electronic On-Demand All-Wheel Drive (AWD), this sporty SUV helps to give you the confidence you need to easily devour wide-open stretches of highway, your favourite dirt road, and everything in between. Click to Learn More 2021 RAV4 PRIME EXTERIOR DESIGN Bold meets beautiful. Distinctly bold and intelligently designed. The RAV4 Prime flaunts its bold, athletic attitude with a striking front grille that includes a unique front lower spoiler. Complementing its sporty styling are piano black exterior accents and available features such as vertical LED accent lights, 19-inch alloy wheels, two-tone exterior paint colours, and a panoramic moonroof. 2021 RAV4 PRIME INTERIOR STYLING Get in and go all out. Equipped and optimized for adventure. The RAV4 Prime’s premium interior surrounds you in comfort with heated front and rear seats, an 8-way power adjustable driver’s seat, a heated steering wheel, and ambient lighting to accentuate an already spirited ride. A host of intuitive features that include an 8-inch touch-screen display, available Qi wireless charging, a Bird’s-Eye-View Camera, and a Head-Up display help you to stay connected and focused on the road ahead. -

Plug-In Hybrid Gasoline-Electric Hybrid Synergy Drive
Plug-in Hybrid Gasoline-Electric Hybrid Synergy Drive ZVW35 Series Foreword This guide was developed to educate and assist dismantlers in the safe handling of Toyota Prius Plug-in gasoline-electric hybrid vehicles. Prius Plug-in hybrid dismantling procedures are similar to other non-hybrid Toyota vehicles with the exception of the high voltage electrical system. It is important to recognize and understand the high voltage electrical system features and specifications of the Toyota Prius Plug-in hybrid, as they may not be familiar to dismantlers. High voltage electricity powers the A/C compressor, electric motor, generator, and inverter/converter. All other conventional automotive electrical devices such as the headlights, radio, and gauges are powered from a separate 12 Volt auxiliary battery. Numerous safeguards have been designed into the Prius Plug-in hybrid to help ensure the high voltage, approximately 346*1 or 207.2*2 Volt, Lithium-ion (Li-ion) Hybrid Vehicle (HV) battery pack is kept safe and secure in an accident. The Li-ion HV battery pack contains sealed batteries that are similar to rechargeable batteries used in some battery operated power tools and other consumer products. The electrolyte is absorbed in the cell plates and will not normally leak out even if the battery is cracked. In the unlikely event the electrolyte does leak, it can be easily neutralized with a dilute boric acid solution or vinegar. High voltage cables, identifiable by orange insulation and connectors, are isolated from the metal chassis of the vehicle. *1: 2010 Model *2: 2012 Model Additional topics contained in the guide include: • Toyota Prius Plug-in hybrid identification. -

TMS-NTC-13178 July 23, 2013 Recall Management Division National
Toyota Motor Sales, U.S.A., Inc. 19001 South Western Avenue, S207 Torrance, CA 90509-2991 TMS-NTC-13178 July 23, 2013 Recall Management Division National Highway Traffic Safety Administration 1200 New Jersey Avenue, SE Washington, DC 20590 Re: Toyota Safety Recall 13V-235 Dealer Notification - Remedy To whom it may concern, Please find attached the Dealer Notification - Remedy Letter for Toyota Safety Recall 13V-235 on the following Toyota and Lexus vehicles: Certain 2010 Model Year HS250h Vehicles Certain 2010 Model Year Prius Vehicles We will send a DVD with the video links mentioned in the Remedy Instructions under separate cover due to the size of the video file. If you have any questions regarding this matter, please contact me at (310) 468-5316. Sincerely, Quality Compliance Assistant Manager Attachments: Lexus 13V-235 (DLD) Dealer Notification (Remedy) Toyota 13V-235 (D0H) Dealer Notification (Remedy) July 24, 2013 Subject: Safety Recall DLD – Remedy Available Certain 2010 Model Year HS 250h Vehicles Brake Booster Pump Assembly (Accumulator) Dear Dealer Principal: As previously announced on June 5, 2013, Lexus filed a Defect Information Report (DIR) with the National Highway Traffic Safety Administration (NHTSA) informing the agency of our intent to conduct a voluntary Safety Recall on certain 2010 Model Year HS 250h vehicles. Lexus has completed remedy preparations and will now begin mailing the remedy owner letter. Condition The subject vehicles are equipped with a brake booster pump assembly which can develop a crack inside the accumulator housing. If this occurs, nitrogen gas could leak into the brake fluid and gradually cause a loss of power assist. -

Brochure for 2011 Lexus LS & Lsh Hybrid
the 2011 LS line Since our inception more than 20 years ago, our pursuit of perfection has led to craftsmanship, innovation and ownership experiences that have set the standard for the industry. Now, with the world-class line of LS vehicles, we’re as close to perfection as we’ve ever come. LS shown with available equipment. it doesn’t just lead an industry, it inspires one. From the day it launched the Lexus brand, the LS has been one step ahead of other luxury automobiles. Its attention to detail, innovative technology and unrivaled interior experience revolutionized the category. Available in four unique versions, each incomparable in its own way, the LS Line has raised the automotive bar once again. In fact, with multiple world’s first technologies, you might even say that surpassing tradition is becoming a tradition in itself. the 2011 LS Line LS 460 (RWD or AWD) 4.6-liter, V8, eight-speed sequential-shift automatic with dual Variable Valve Timing with intelligence (VVT-i) + Electronic intake valve timing (VVT-iE), 0-to-60 in 5.4/5.9 seconds (RWD/AWD)1,2 ls 460 L (RWD or AWD) 4.6-liter, V8, eight-speed sequential-shift automatic with dual Variable Valve Timing with intelligence (VVT-i) + Electronic intake valve timing (VVT-iE), 0-to-60 in 5.4/5.9 seconds (RWD/AWD),1,2 long wheelbase ls 460 Sport (RWD) 4.6-liter, V8, eight-speed sequential-shift automatic with dual Variable Valve Timing with intelligence (VVT-i) + Electronic intake valve timing (VVT-iE), Sport-tuned air suspension, 19-in forged alloy wheels,3 Brembo® brakes4 ls 600h L (AWD) 5.0-liter, V8 + high-output electric-drive motor, eight-speed sequential-shift automatic with dual Variable Valve Timing with intelligence (VVT-i) + Electronic intake valve timing (VVT-iE), 438 total system horsepower,1 long wheelbase LS shown with available equipment. -

The New Yaris Hybrid Content
The new Yaris Hybrid Content The new Yaris Hybrid: a quiet revolution in the B-segment p. 04 A more aspirational design for the most efficient package in the segment p. 06 Downsized full hybrid powertrain for fuel and space efficiency p. 10 Well balanced dynamics, ideal for city driving p. 16 An unbeatable value proposition in the B-segment p. 22 Environmental performance without compromise on comfort or convenience p. 24 TMMF manufactures the only full hybrid in the B-segment p. 28 Specifications & Equipment list p. 32 Image bank p. 40 2 3 The new Yaris Hybrid: a quiet revolution in the B-segment Expected to represent 20% of all Yaris model sales in Europe, the Yaris Hybrid With Toyota Motor Manufacturing UK (TMUK) already assembling Toyota is not a niche model. Rather, it represents a new, unique alternative for full hybrid vehicles, the start of Yaris Hybrid production at Toyota Motor — Flagship of Toyota’s best-selling core model in Europe demanding urban drivers who expect a new driving and ownership experience Manufacturing France (TMMF) makes Toyota the only manufacturer to have — Only full hybrid powertrain in the B-segment - the ultimate urban car from their car. two full hybrid technology production facilities in Europe, reinforcing the — Clever Hybrid Synergy Drive® system packaging allows for great fuel efficiency and low emissions with no compromise company’s commitment to local, advanced technology manufacturing in on space The Yaris Hybrid combines the tangible benefits of advanced technology, low Europe. emissions and unbeatable cost of ownership with a new, uniquely relaxed and — Toyota’s advanced full hybrid technology more accessible than ever quiet driving style. -
2021 Ls Brochure
LS 2021 Can a vehicle give you a glimpse of the future? Can something that’s existed for millions of years suddenly feel new? Can the shape of a seat cushion make conversations more enjoyable? 1 To craft the most amazing machines, you don’t start with machines at all. You start with people. The 2021 Lexus LS LS 500 LS 500h LS 500 F SPORT From its elevated interior with a new pinch-and-zoom Pairing a potent 3.5-liter V6 engine with powerful electric motors Featuring performance-inspired instrumentation, bolstered front touchscreen display to its redesigned front fascia, headlamps and a lightweight lithium-ion battery, the Lexus Multistage Hybrid sport seats, F SPORT 20-inch wheels with a new Dark Vapor and taillamps, the LS is reimagined inside and out. Built upon the Drive system delivers even more seamless acceleration and torque Chrome finish, larger brakes,2 aluminum pedals and our most platform of the high-performance LC coupe, it’s powered by without requiring a charge. Providing you the direct, instinctive advanced available vehicle dynamics control system yet, the LS a twin-turbocharged 416-hp1 V6 engine paired with a thrilling feel of a 10-speed automatic transmission, this is efficiency at the F SPORT delivers the most engaging LS driving experience ever. 10-speed automatic transmission and delivers a more refined ride peak of luxury. Rear-wheel drive or all-wheel drive. And the exclusive Dynamic Handling Package with Active Rear than ever before. Rear-wheel drive or all-wheel drive. Steering and active stabilizers pushes the intensity even higher. -

A Comparison Study Between Power-Split Cvts and a Push-Belt CVT
A comparison study between power-split CVTs and a push-belt CVT Pablo Noben DCT 2007.100 Master’s thesis Coaches: ir. T. Hofman dr. P.A. Veenhuizen Supervisor: prof. dr. ir. M. Steinbuch Technische Universiteit Eindhoven Department Mechanical Engineering Dynamics and Control Technology Group Automotive Engineering Science Group Eindhoven, August, 2007 Abstract Since the ongoing discussion about the global warming of the earth, this is mainly attributed to the greenhouse gasses. Which on their part are produced by vehicles, by internal combustion engines to be more accurate. More and more car manufacturers and research institutes are investigating alterna- tives for internal combustion engines. However changing the fuel for vehicles is very difficult because this is a complex collaboration of governments, oil companies and car manufacturers. On top of this years and years of development has resulted in the current infrastructure of the gas stations. A first solution to decrease the fuel consumption of vehicles is to develop hybrid power trains. With a hybrid power train, a power train consisting of two power sources is meant here. Normally this is an internal combustion engine combined with one or more electric machines. The fuel consumption of a hybrid vehicle is lower compared to a conventional vehicle because electric machines can recover brake energy which can be stored in a battery or a similar electrical storage system. Later this electric energy can be used to power the electric machines and assist the internal combustion engine to power the vehicle and herewith decreasing the fuel consumption. To realize a hybrid power train the most commercially successful hybrid vehicle makes use of a power split transmission.