A Comparison Study Between Power-Split Cvts and a Push-Belt CVT
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RAV4 Hybrid Gasoline-Electric Hybrid Synergy Drive
RAV4 Hybrid Gasoline-Electric Hybrid Synergy Drive AVA4 2 /AVA4 4 S eries Foreword This guide was developed to educate and assist dismantlers in the safe handling of Toyota RAV4 Hybrid gasoline-electric hybrid vehicles. RAV4 Hybrid dismantling procedures are similar to other non-hybrid Toyota vehicles with the exception of the high voltage electrical system. It is important to recognize and understand the high voltage electrical system features and specifications of the Toyota RAV4 Hybrid, as they may not be familiar to dismantlers. High voltage electricity powers the A/C compressor, electric motors, generator, and inverter/converter. All other conventional automotive electrical devices such as the head lights, radio, and gauges are powered from a separate 12 V auxiliary battery. Numerous safeguards have been designed into the RAV4 Hybrid to help ensure the high voltage, approximately 244.8 V, Nickel Metal Hydride (NiMH) Hybrid Vehicle (HV) battery pack is kept safe and secure in an accident. The NiMH HV battery pack contains sealed batteries that are similar to rechargeable batteries used in some battery operated power tools and other consumer products. The electrolyte is absorbed in the cell plates and will not normally leak out even if the battery is cracked. In the unlikely event the electrolyte does leak, it can be easily neutralized with a dilute boric acid solution or vinegar. High voltage cables, identifiable by orange insulation and connectors, are isolated from the metal chassis of the vehicle. Additional topics contained in the guide include: • Toyota RAV4 Hybrid identification. • Major hybrid component locations and descriptions. By following the information in this guide, dismantlers will be able to handle RAV4 Hybrid hybrid- electric vehicles as safely as the dismantling of a conventional gasoline engine automobile. -

7.Price Check List Plug in Kits Tuner Series JUN 2017 Black White Small
Product Code Product Description RRP inc GST OFF ROAD OFFROADNIS90 Tuner Series Offroad Plug‐In Kit Nissan Patrol GU$ 2,695.00 OFFROADNIS91 Tuner Series Offroad Plug‐In Kit Nissan Patrol GQ$ 2,695.00 OFFROADRAN01 Tuner Series Offroad Plug‐In Kit Range Rover 3.5 Litre '85$ 2,645.00 OFFROADSUZ01 Tuner Series Offroad Plug‐In Kit Suzuki Vitara 95$ 2,645.00 OFFROADTOY10 Tuner Series Offroad Plug‐In Kit Toyota HiLux 2006, 1GR engine, Wolf ETC$ 2,745.00 OFFROADTOY11 Tuner Series Offroad Plug‐In Kit Toyota Hi Lux 2000$ 2,695.00 OFFROADTOY30 Tuner Series Offroad Plug‐In Kit Toyota Landcruiser 100 Series Man$ 2,695.00 OFFROADTOY31 Tuner Series Offroad Plug‐In Kit Toyota Landcruiser 100 Series Auto$ 2,695.00 OFFROADTOY41 Tuner Series Offroad Plug‐In Kit Toyota Landcruiser 80 Series, Series II, Auto$ 2,695.00 OFFROADTOY42 Tuner Series Offroad Plug‐In Kit Toyota Landcruiser 80 Series, Series II, manual$ 2,695.00 OFFROADTOY43 Tuner Series Offroad Plug‐In Kit Toyota Landcruiser 80 Series, Series 1, auto$ 2,695.00 OFFROADTOY44 Tuner Series Offroad Plug‐In Kit Toyota Landcruiser 80 Series, Series 1, manual$ 2,695.00 SPORT FORD SPORTFOR01 Tuner Series Sport Plug‐In Kit Ford ED V8 $ 2,955.00 SPORTFOR02 Tuner Series Sport Plug‐In Kit Ford EB 6 Cylinder Manual$ 2,955.00 SPORTFOR03 Tuner Series Sport Plug‐In Kit Ford Falcon AU XR6 6cyl Manual $ 3,055.00 SPORTFOR04 Tuner Series Sport Plug‐In Kit Ford Falcon EF Auto & Manual$ 3,055.00 SPORTFOR06 Tuner Series Sport Plug‐In Kit Ford Falcon F380 $ 2,955.00 SPORTFOR05 Tuner Series Sport Plug‐In Kit Ford Falcon EA/EB/ED -
PRIUS ZR in PURSUIT RED Changing the World, One Driveway at a Time
PRIUS ZR IN PURSUIT RED Changing the world, one driveway at a time When it arrived on the world stage almost 20 years ago, the Prius redefined what was possible in an everyday passenger car. It signalled the beginning of a new movement; one that strove to combine performance and practicality with a greater emphasis on both economy and the environment. Today, after more than 8 million sales globally, the Prius remains Toyota’s hallmark hybrid car. Featuring a dynamic, cutting-edge exterior design, an impressive array of standard technology and a high level of comfort and convenience onboard, the Prius is also more fuel efficient and more fun to drive than ever before. Continuing to push the boundaries of development and design, the evolution of the Prius is a true technological adventure worth taking. Come with us and see for yourself. PRIUS ZR 1.8L PETROL / HYBRID ECVT Prius ZR The distinctive stance and technological prowess of the Prius ZR is accentuated by its dynamic, modern exterior looks. Dramatic LED headlights and taillights, high contrast alloy wheels and a smooth, low-slung silhouette create 1 a striking impression. The Prius ZR features a premium interior that combines practical space and versatility with cutting-edge technologies, such as Toyota’s intelligent S-Flow air conditioning system and the Qi wireless charging tray for compatible devices. The stylish wrap-around dashboard, centrally housed instrumentation, colour Head-Up Display information 3 4 system and supportive seats all serve to improve visibility, ease-of-use and driver and passenger comfort. There remains nothing quite like a Prius, where form 5 meets function with a dash of fashion. -

Gasoline-Electric Hybrid Synergy Drive
Gasoline-Electric Hybrid Synergy Drive AHV40 Series Foreword In March 2006, Toyota released the Toyota CAMRY gasoline-electric hybrid vehicle in North America. Except where noted in this guide, basic vehicle systems and features for the CAMRY hybrid are the same as those on the conventional, non-hybrid, Toyota CAMRY. To educate and assist emergency responders in the safe handling of the CAMRY hybrid technology, Toyota published this CAMRY hybrid Emergency Response Guide. High voltage electricity powers the electric motor, generator, A/C compressor, and inverter/converter. All other automotive electrical devices such as the headlights, power steering, horn, radio, and gauges are powered from a separate 12 Volts battery. Numerous safeguards have been designed into the CAMRY to help ensure the high voltage, approximately 245 Volts, Nickel Metal Hydride (NiMH) Hybrid Vehicle (HV) battery pack is kept safe and secure in an accident. Additional topics contained in the guide include: N Toyota CAMRY identification. N Major hybrid component locations and descriptions. By following the information in this guide, dismantlers will be able to handle the CAMRY hybrid-electric vehicle as safely as the dismantling of a conventional gasoline engine automobile. ¤ 2006 Toyota Motor Corporation All rights reserved. This book may not be reproduced or copied, in whole or in part, without the written permission of Toyota Motor Corporation ii Table of Contents About the CAMRY.........................................................................................................................1 -
Plug-In Hybrid
RAV4 Prime Plug-In Hybrid 2021 CLICK BELOW TO Contents NAVIGATE SECTIONS. Introduction Exterior Design Interior Styling Technology Performance Safety Specifications & Features XSE SE XSE TECHNOLOGY PACKAGE Accessories Warranty 2021 RAV4 PRIME INTRODUCING THE 2021 RAV4 PRIME The most electrifying RAV4 ever made. Experience the power of plugging in. Meet the first ever RAV4 plug-in-hybrid - our most powerful RAV4 yet, with an advanced plug-in hybrid powertrain that generates 302 net horsepower. Best of all, you can choose to plug it in, gas it up, or both. And with the added benefit of Electronic On-Demand All-Wheel Drive (AWD), this sporty SUV helps to give you the confidence you need to easily devour wide-open stretches of highway, your favourite dirt road, and everything in between. Click to Learn More 2021 RAV4 PRIME EXTERIOR DESIGN Bold meets beautiful. Distinctly bold and intelligently designed. The RAV4 Prime flaunts its bold, athletic attitude with a striking front grille that includes a unique front lower spoiler. Complementing its sporty styling are piano black exterior accents and available features such as vertical LED accent lights, 19-inch alloy wheels, two-tone exterior paint colours, and a panoramic moonroof. 2021 RAV4 PRIME INTERIOR STYLING Get in and go all out. Equipped and optimized for adventure. The RAV4 Prime’s premium interior surrounds you in comfort with heated front and rear seats, an 8-way power adjustable driver’s seat, a heated steering wheel, and ambient lighting to accentuate an already spirited ride. A host of intuitive features that include an 8-inch touch-screen display, available Qi wireless charging, a Bird’s-Eye-View Camera, and a Head-Up display help you to stay connected and focused on the road ahead. -

Plug-In Hybrid Gasoline-Electric Hybrid Synergy Drive
Plug-in Hybrid Gasoline-Electric Hybrid Synergy Drive ZVW35 Series Foreword This guide was developed to educate and assist dismantlers in the safe handling of Toyota Prius Plug-in gasoline-electric hybrid vehicles. Prius Plug-in hybrid dismantling procedures are similar to other non-hybrid Toyota vehicles with the exception of the high voltage electrical system. It is important to recognize and understand the high voltage electrical system features and specifications of the Toyota Prius Plug-in hybrid, as they may not be familiar to dismantlers. High voltage electricity powers the A/C compressor, electric motor, generator, and inverter/converter. All other conventional automotive electrical devices such as the headlights, radio, and gauges are powered from a separate 12 Volt auxiliary battery. Numerous safeguards have been designed into the Prius Plug-in hybrid to help ensure the high voltage, approximately 346*1 or 207.2*2 Volt, Lithium-ion (Li-ion) Hybrid Vehicle (HV) battery pack is kept safe and secure in an accident. The Li-ion HV battery pack contains sealed batteries that are similar to rechargeable batteries used in some battery operated power tools and other consumer products. The electrolyte is absorbed in the cell plates and will not normally leak out even if the battery is cracked. In the unlikely event the electrolyte does leak, it can be easily neutralized with a dilute boric acid solution or vinegar. High voltage cables, identifiable by orange insulation and connectors, are isolated from the metal chassis of the vehicle. *1: 2010 Model *2: 2012 Model Additional topics contained in the guide include: • Toyota Prius Plug-in hybrid identification. -
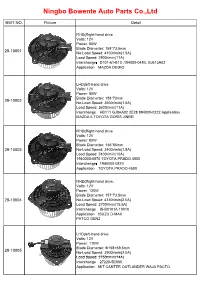
28-10001 ¹Ä·Ç»Ú
Ningbo Bowente Auto Parts Co.,Ltd BWT NO. Picture Detail RHD(Right-hand drive) Volts: 12V Power: 80W Blade Diamerter: 158*73.5mm 28-10001 No-Load Speed: 4100r/min(1.5A) Load Speed: 2900r/min(11A) Interchange:D101-61-B10 ,194000-0450, GJ613A02 Application:MAZDA DEMIO LHD(left-hand drive) Volts: 12V Power: 80W Blade Diamerter: 158*70mm 28-10002 No-Load Speed: 3600r/min(1.5A) Load Speed: 2600r/min(11A) Interchange:HB111 GJ8AA02 2E28 894000-0222 Application: MAZDA 6 TOYOTA GORIS JINBEI RHD(Right-hand drive) Volts: 12V Power: 80W Blade Diamerter: 146*65mm 28-10003 No-Load Speed: 3400r/min(1.5A) Load Speed: 2400r/min(10A) 1940000-0870 TOYOTA PRADO 4500 Interchange:1940000-0870 Application:TOYOTA PRADO 4500 RHD(Right-hand drive) Volts: 12V Power: 120W Blade Diamerter: 157*73.5mm 28-10004 No-Load Speed: 4150r/min(2.0A) Load Speed: 2700r/min(15.5A) Interchange:IS-B0101A 10010 Application:ISUZU D-MAX PATCO GEN2 LHD(left-hand drive) Volts: 12V Power: 110W Blade Diamerter: Φ158×69.5mm 28-10005 No-Load Speed: 3900r/min(2.0A) Load Speed: 2750r/min(14A) Interchange:27220-5E900 Application:MIT CANTER OUTLANDER WAJA PACTO Ningbo Bowente Auto Parts Co.,Ltd LHD(left-hand drive) Volts: 24V Power: 90W Blade Diamerter: Φ147×79.5mm 28-10006 No-Load Speed: 3800r/min(2.0A) Load Speed: 3000r/min(6A) Interchange:2116 Application: MIT Volts: 12V Power: 216W 28-10007 Blade Diamerter: Φ164×69mm OE:87103-35060 Application:07PRADO/4RUNNER/LEXUS GX470 LHD(left-hand drive) Volts: 12V Power: 100W Blade Diamerter: Φ155×70mm No-Load Speed: 3950r/min(1.5A) Load Speed: 2700r/min(12.5A) -

The New Yaris Hybrid Content
The new Yaris Hybrid Content The new Yaris Hybrid: a quiet revolution in the B-segment p. 04 A more aspirational design for the most efficient package in the segment p. 06 Downsized full hybrid powertrain for fuel and space efficiency p. 10 Well balanced dynamics, ideal for city driving p. 16 An unbeatable value proposition in the B-segment p. 22 Environmental performance without compromise on comfort or convenience p. 24 TMMF manufactures the only full hybrid in the B-segment p. 28 Specifications & Equipment list p. 32 Image bank p. 40 2 3 The new Yaris Hybrid: a quiet revolution in the B-segment Expected to represent 20% of all Yaris model sales in Europe, the Yaris Hybrid With Toyota Motor Manufacturing UK (TMUK) already assembling Toyota is not a niche model. Rather, it represents a new, unique alternative for full hybrid vehicles, the start of Yaris Hybrid production at Toyota Motor — Flagship of Toyota’s best-selling core model in Europe demanding urban drivers who expect a new driving and ownership experience Manufacturing France (TMMF) makes Toyota the only manufacturer to have — Only full hybrid powertrain in the B-segment - the ultimate urban car from their car. two full hybrid technology production facilities in Europe, reinforcing the — Clever Hybrid Synergy Drive® system packaging allows for great fuel efficiency and low emissions with no compromise company’s commitment to local, advanced technology manufacturing in on space The Yaris Hybrid combines the tangible benefits of advanced technology, low Europe. emissions and unbeatable cost of ownership with a new, uniquely relaxed and — Toyota’s advanced full hybrid technology more accessible than ever quiet driving style. -

A Seminar Report Hybrid Synergy Drive
A SEMINAR REPORT ON HYBRID SYNERGY DRIVE Submitted by YADBIR SINGH STUDENT OF MECHANICAL ENGINEERING BHABHA INSTITUTE OF TECHNOLOGY KANPUR (DEHAT) [email protected] CERTIFICATE This is to certify that seminar report entitled “Hybrid synergy drives” being submitted by Yadbir Singh (0725440058) to Mechanical Engineering Department of Bhabha Institute of Technology Kanpur Dehat India, in partial fulfillment for the award for degree of Bachelor of Technology (B.Tech), is a record of bonfire work carried under my supervision and guidance. CERTIFICATE This is to certify that seminar report entitled “Hybrid synergy drives” being submitted by Yadbir Singh (0725440058) to Mechanical Engineering Department of Bhabha Institute of Technology Kanpur Dehat India, in partial fulfillment for the award for degree of Bachelor of Technology (B.Tech), is a record of bonfire work carried under my supervision and guidance. HEAD OF DEPARTMENT MR .AKHIL KUMAR . ACKNOWLEDGEMENTS I would like to extend my heartfelt thanks and deep sense of gratitude to all those who helped me to writing this Report. First, I would also like to express my thanks to Er. Bupendra Singh. This most sincere and important acknowledgement and gratitude is due to my parents, who have given their moral boosting support and encouragements at some stage of this endeavor. Yadbir Singh Roll no. 0725440058 Mechanical Engineering Bhabha Institute of Technology, Kanpur, India Table of Contents A brief induction of hybrid synergy drives.....................................1 Principle (HSD).............................................................................................2 -

Gasoline-Electric Hybrid Synergy Drive
Gasoline-Electric Hybrid Synergy Drive AVV50 Series Foreword This guide was developed to educate and assist dismantlers in the safe handling of Toyota Camry gasoline-electric hybrid vehicles. Camry hybrid dismantling procedures are similar to other non-hybrid Toyota vehicles with the exception of the high voltage electrical system. It is important to recognize and understand the high voltage electrical system features and specifications of the Toyota Camry hybrid, as they may not be familiar to dismantlers. High voltage electricity powers the A/C compressor, electric motor, generator, and inverter/converter. All other conventional automotive electrical devices such as the headlights, radio, and gauges are powered from a separate 12 Volt auxiliary battery. Numerous safeguards have been designed into the Camry hybrid to help ensure the high voltage, approximately 244.8 Volt, Nickel Metal Hydride (NiMH) Hybrid Vehicle (HV) battery pack is kept safe and secure in an accident. The NiMH HV battery pack contains sealed batteries that are similar to rechargeable batteries used in some battery operated power tools and other consumer products. The electrolyte is absorbed in the cell plates and will not normally leak out even if the battery is cracked. In the unlikely event the electrolyte does leak, it can be easily neutralized with a dilute boric acid solution or vinegar. High voltage cables, identifiable by orange insulation and connectors, are isolated from the metal chassis of the vehicle. Additional topics contained in the guide include: • Toyota Camry hybrid identification. • Major hybrid component locations and descriptions. By following the information in this guide, dismantlers will be able to handle Camry hybrid-electric vehicles as safely as the dismantling of a conventional non-hybrid automobile. -

Evaluation of the 2010 Toyota Prius Hybrid Synergy Drive System
U.S. Department of Energy Vehicle Technologies, EE-2G 1000 Independence Avenue, S.W. Washington, D.C. 20585-0121 FY2011 EVALUATION OF THE 2010 TOYOTA PRIUS HYBRID SYNERGY DRIVE SYSTEM Prepared by: Oak Ridge National Laboratory Mitch Olszewski, Program Manager Submitted to: Energy Efficiency and Renewable Energy FreedomCAR and Vehicle Technologies Vehicle Systems Team Susan A. Rogers, Technology Development Manager March 2011 ORNL/TM-2010/253 Energy and Transportation Science Division EVALUATION OF THE 2010 TOYOTA PRIUS HYBRID SYNERGY DRIVE SYSTEM T. A. Burress S. L. Campbell C. L. Coomer C. W. Ayers A. A. Wereszczak J. P. Cunningham L. D. Marlino L. E. Seiber H. T. Lin Publication Date: March 2011 Prepared by the OAK RIDGE NATIONAL LABORATORY Oak Ridge, Tennessee 37831 managed by UT-BATTELLE, LLC for the U.S. DEPARTMENT OF ENERGY Under contract DE-AC05-00OR22725 DOCUMENT AVAILABILITY Reports produced after January 1, 1996, are generally available free via the U.S. Department of Energy (DOE) Information Bridge: Web site: http://www.osti.gov/bridge Reports produced before January 1, 1996, may be purchased by members of the public from the following source: National Technical Information Service 5285 Port Royal Road Springfield, VA 22161 Telephone: 703-605-6000 (1-800-553-6847) TDD: 703-487-4639 Fax: 703-605-6900 E-mail: [email protected] Web site: http://www.ntis.gov/support/ordernowabout.htm Reports are available to DOE employees, DOE contractors, Energy Technology Data Exchange (ETDE) representatives, and International Nuclear Information System (INIS) representatives from the following source: Office of Scientific and Technical Information P.O. -

PRIUS PRIME PRIUS PHV Plug-In Hybrid Gasoline-Electric Hybrid Synergy Drive
PRIUS PRIME PRIUS PHV Plug-in Hybrid Gasoline-Electric Hybrid Synergy Drive ZVW52 Series Foreword This guide was developed to educate and assist dismantlers in the safe handling of Toyota PRIUS PRIME, PRIUS PHV gasoline-electric hybrid vehicles. PRIUS PRIME, PRIUS PHV dismantling procedures are similar to other non-hybrid Toyota vehicles with the exception of the high voltage electrical system. It is important to recognize and understand the high voltage electrical system features and specifications of the Toyota PRIUS PRIME, PRIUS PHV, as they may not be familiar to dismantlers. High voltage electricity powers the A/C compressor, electric motor, generator, and inverter/converter. All other conventional automotive electrical devices such as the head lights, radio, and gauges are powered from a separate 12 Volt auxiliary battery. Numerous safeguards have been designed into the PRIUS PRIME, PRIUS PHV to help ensure the high voltage, approximately 351.5 Volt, Lithium-ion (Li-ion) Hybrid Vehicle (HV) battery pack is kept safe and secure in an accident. The Li-ion HV battery pack contains sealed batteries that are similar to rechargeable batteries used in some battery operated power tools and other consumer products. The electrolyte is absorbed in the cell plates and will not normally leak out even if the battery is cracked. In the unlikely event the electrolyte does leak, it can be easily neutralized with a dilute boric acid solution or vinegar. High voltage cables, identifiable by orange insulation and connectors, are isolated from the metal chassis of the vehicle. Additional topics contained in the guide include: Toyota PRIUS PRIME, PRIUS PHV identification.