Intel Processor Pricing Effective 4/20/2008 1Ku Tray Units
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Focus on Your Core Competency the COM Express Standard
Computer-On-Modules Focus on your Core Competency The COM Express Standard – A Computer-On-Module (COM) provides a convenient solution for Adaptable to Your Specific Needs OEMs that need computing functionality but are not interested in COM Express was developed and is maintained by PICMG investing the time and resources into designing a single board (PCI Industrial Computer Manufacturers Group). COM computer. There are several COM standards, one of the more Express was released in the summer of 2005 and is the popular being COM Express (also referred to as COM.0). COM most widely used COM standard. The standard defines the Express modules contain the CPU, memory, common peripherals physical size, interconnect, and thermal interface for a COM. (USB, SATA) and an I/O interface (PCI and PCI Express). OEMs that The original COM Express specification was written to use COM Express modules design a carrier board that contains any support peripherals that were available at the time of release required I/O interfaces not found on the COM Express module as – including USB 2.0, SATA, PATA, Ethernet, VGA, LVDS, well as connectors for external I/O. A COM based solution allows SDVO, PCI, and PCI Express Gen 1. Several pinout types an OEM to focus on their core competency and not the design and were defined by PICMG with each one having a specific maintenance of a single board computer. combination of peripherals, expansion interfaces and connector layout. The most widely used COM Express A COM Express based solution with a custom carrier board offers module is a type 2, followed by type 1. -

Webcore: Architectural Support for Mobile Web Browsing
WebCore: Architectural Support for Mobile Web Browsing Yuhao Zhu Vijay Janapa Reddi Department of Electrical and Computer Engineering The University of Texas at Austin [email protected], [email protected] Abstract The Web browser is undoubtedly the single most impor- Browser Browser tant application in the mobile ecosystem. An average user 63% 54% spends 72 minutes each day using the mobile Web browser. Web browser internal engines (e.g., WebKit) are also growing 23% 8% 32% Media 6% in importance because they provide a common substrate for 7% 7% Others developing various mobile Web applications. In a user-driven, Media Games Others interactive, and latency-sensitive environment, the browser’s Email performance is crucial. However, the battery-constrained na- (a) Time dist. of window focus. (b) Time dist. of CPU processing. ture of mobile devices limits the performance that we can de- Fig. 1: Mobile Web browser share study conducted by our industry liver for mobile Web browsing. As traditional general-purpose research partner on their employees’ devices [2]. Similar observa- techniques to improve performance and energy efficiency fall tions were reported by NVIDIA on Tegra-based mobile handsets [3,4]. short, we must employ domain-specific knowledge while still maintaining general-purpose flexibility. network limited. However, this trend is changing. With about In this paper, we first perform design-space exploration 10X improvement in round-trip time from 3G to LTE, network to identify appropriate general-purpose architectures that latency is no longer the only performance bottleneck [51]. uniquely fit the characteristics of a popular Web browsing Prior work has shown that over the past decade, network engine. -

EVA: an Efficient Vision Architecture for Mobile Systems
EVA: An Efficient Vision Architecture for Mobile Systems Jason Clemons, Andrea Pellegrini, Silvio Savarese, and Todd Austin Department of Electrical Engineering and Computer Science University of Michigan Ann Arbor, Michigan 48109 fjclemons, apellegrini, silvio, [email protected] Abstract The capabilities of mobile devices have been increasing at a momen- tous rate. As better processors have merged with capable cameras in mobile systems, the number of computer vision applications has grown rapidly. However, the computational and energy constraints of mobile devices have forced computer vision application devel- opers to sacrifice accuracy for the sake of meeting timing demands. To increase the computational performance of mobile systems we Figure 1: Computer Vision Example The figure shows a sock present EVA. EVA is an application-specific heterogeneous multi- monkey where a computer vision application has recognized its face. core having a mix of computationally powerful cores with energy The algorithm would utilize features such as corners and use their efficient cores. Each core of EVA has computation and memory ar- geometric relationship to accomplish this. chitectural enhancements tailored to the application traits of vision Watts over 250 mm2 of silicon, typical mobile processors are limited codes. Using a computer vision benchmarking suite, we evaluate 2 the efficiency and performance of a wide range of EVA designs. We to a few Watts with typically 5 mm of silicon [4] [22]. show that EVA can provide speedups of over 9x that of an embedded To meet the limited computation capability of mobile proces- processor while reducing energy demands by as much as 3x. sors, computer vision application developers reluctantly sacrifice image resolution, computational precision or application capabili- Categories and Subject Descriptors C.1.4 [Parallel Architec- ties for lower quality versions of vision algorithms. -
6Th Generation Intel® Core™ Processors Based on the Mobile U-Processor for Iot Solutions (Intel® Core™ I7-6600U, I5-6300U, and I3-6100U Processors)
PLATFORM BRIEF 6th Generation Intel® Core™ Mobile Processor Family Internet of Things 6th Generation Intel® Core™ Processors Based on the Mobile U-Processor for IoT Solutions (Intel® Core™ i7-6600U, i5-6300U, and i3-6100U Processors) Harness the Performance, Features, and Edge-to-Cloud Scalability to Build Tomorrow’s IoT Solutions Today Product Overview Stunning Visual Performance Intel is proud to announce its 6th The 6th generation Intel Core generation Intel® Core™ processor processors utilize the new Gen9 family featuring ultra low-power, graphics engine, which improves 64-bit, multicore processors built on graphic performance by up to the latest 14 nm technology. Designed 34 percent.1 The improvements are for small form-factor applications, this demonstrated through faster 3-D multichip package (MCP) integrates graphics performance and rendering a low-power CPU and platform applications at low power. Video controller hub (PCH) onto a common playback is also faster and smoother package substrate. thanks to the new multiplane overlay capability. The new generation offers The 6th generation Intel Core processor up to three independent audio streams family offers dramatically higher CPU and displays, Ultra HD 4K support, and and graphics performance, a broad workload consolidation for lower BOM range of power and features scaling costs and energy output. the entire Intel product line, and new, advanced features that boost edge-to- Users will also enjoy enhanced cloud Internet of Things (IoT) designs high-density streaming applications in a wide variety of markets. These and optimized 4K videoconferencing processors run at 15W thermal design with accelerated 4K hardware media power (TDP) and are ideal for small, codecs HEVC (8-bit), VP8, VP9, and energy-efficient, form-factor designs, VDENC encoding, decoding, and including digital signage, point-of-sale transcoding. -

PART I ITEM 1. BUSINESS Industry We Are
PART I ITEM 1. BUSINESS Industry We are the world’s largest semiconductor chip maker, based on revenue. We develop advanced integrated digital technology products, primarily integrated circuits, for industries such as computing and communications. Integrated circuits are semiconductor chips etched with interconnected electronic switches. We also develop platforms, which we define as integrated suites of digital computing technologies that are designed and configured to work together to provide an optimized user computing solution compared to ingredients that are used separately. Our goal is to be the preeminent provider of semiconductor chips and platforms for the worldwide digital economy. We offer products at various levels of integration, allowing our customers flexibility to create advanced computing and communications systems and products. We were incorporated in California in 1968 and reincorporated in Delaware in 1989. Our Internet address is www.intel.com. On this web site, we publish voluntary reports, which we update annually, outlining our performance with respect to corporate responsibility, including environmental, health, and safety compliance. On our Investor Relations web site, located at www.intc.com, we post the following filings as soon as reasonably practicable after they are electronically filed with, or furnished to, the U.S. Securities and Exchange Commission (SEC): our annual, quarterly, and current reports on Forms 10-K, 10-Q, and 8-K; our proxy statements; and any amendments to those reports or statements. All such filings are available on our Investor Relations web site free of charge. The SEC also maintains a web site (www.sec.gov) that contains reports, proxy and information statements, and other information regarding issuers that file electronically with the SEC. -
Intel Mobile CPU (2007-2010)
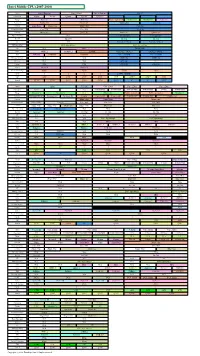
Intel Mobile CPU (2007-2010) Brand Core 2 Extreme Core 2 Quad Core 2 Extreme Core i7 Processor # X9000 X9100 Q9000 Q9100 QX9xxx Voltage Extreme Extreme Power optimized Standard V Standard V Extreme Codename Penryn 6M Penryn QC Auburndale Clarksfield Platform Santa Rosa Montevina Montevina Calpella Micro-architecture Core MA Core MA Nehalem # of Core Dual Core Quad Core Dual Core Quad Core Hyper-Threading N/A 2 threads/core 2 threads/core Intel 64 Intel 64 Intel 64 Intel 64 VT VT Extended VT-x/d Extended VT-x/d EIST(SpeedStep) EIST(SpeedStep) EIST(SpeedStep) IDA N/A IDA Turbo Mode Cache 6MB L2 2x3MB L2 2x6MB 512KB L2+4MB L3 1MB L2+8MB L3 FSB FSB 800 FSB1066 FSB1066 PCIe x16/DMI PCIe x16/DMI Memory interface N/A N/A DDR3 x2 DDR3 x2 GPU core N/A N/A GPU core N/A Package PGA PGA rPGA989 rPGA989 Socket Socket P Socket P Process Technology 45nm 45nm 45nm 45nm # of Die 1 2 2 2 2(CPU+GMCH) 1 TDP 44W 45W 45W 45W 35W 45W? 45W? 55W Launch Q1'08 Q2'08 Q1'09 Q3'08 Q3'08 Q3'09 09 09 Q3'09 Brand Atom Celeron Core 2 Duo Core 2 Duo Core 2 Duo Processor # N2xx 7xx T8100/8300 T9300/9500 SP9200/9400 P8400/8600 P9500 T9400/9600 Voltage Standard V Standard V ULV Standard V Power optimized Power optimized Standard V Codename Diamondville SC Pineview SC Pineview DC Penryn Penryn 3M Penryn 6M Penryn 6M Penryn 3M Penryn 6M Platform Montevina Santa Rosa Montevina Micro-architecture Silverthorne Lincroft Core MA Core MA Core MA # of Core Single Core Single Core Dual Core Single Core Dual Core Dual Core Hyper-Threading 2 threads/core 2 threads/core N/A N/A N/A Intel -
NVIDIA Tegra 4 Family CPU Architecture 4-PLUS-1 Quad Core
Whitepaper NVIDIA Tegra 4 Family CPU Architecture 4-PLUS-1 Quad core 1 Table of Contents ...................................................................................................................................................................... 1 Introduction .............................................................................................................................................. 3 NVIDIA Tegra 4 Family of Mobile Processors ............................................................................................ 3 Benchmarking CPU Performance .............................................................................................................. 4 Tegra 4 Family CPUs Architected for High Performance and Power Efficiency ......................................... 6 Wider Issue Execution Units for Higher Throughput ............................................................................ 6 Better Memory Level Parallelism from a Larger Instruction Window for Out-of-Order Execution ...... 7 Fast Load-To-Use Logic allows larger L1 Data Cache ............................................................................. 8 Enhanced branch prediction for higher efficiency .............................................................................. 10 Advanced Prefetcher for higher MLP and lower latency .................................................................... 10 Large Unified L2 Cache ....................................................................................................................... -

Architectural Support for Javascript Type-Checking on Mobile Processors
Checked Load: Architectural Support for JavaScript Type-Checking on Mobile Processors Owen Anderson Emily Fortuna Luis Ceze Susan Eggers Computer Science and Engineering, University of Washington http://sampa.cs.washington.edu Abstract applications, including Google Maps, Twitter, and Face- book would not be feasible without both high-throughput Dynamic languages such as Javascript are the de-facto and low-latency JavaScript virtual machines on the client. standard for web applications. However, generating effi- At the same time, innovations in mobile device pro- cient code for dynamically-typed languages is a challenge, grammability have opened up embedded targets to the same because it requires frequent dynamic type checks. Our anal- class of programmers. Today’s smart mobile devices are ysis has shown that some programs spend upwards of 20% expected to provide a developer API that is usable by of dynamic instructions doing type checks, and 12.9% on normal application developers, as opposed to the special- average. ized embedded developers of the past. One such plat- In this paper we propose Checked Load, a low- form, HP/Palm’s WebOS [17], uses JavaScript as its pri- complexity architectural extension that replaces software- mary application development language. Others encourage based, dynamic type checking. Checked Load is comprised JavaScript-heavy web applications in addition to their na- of four new ISA instructions that provide flexible and au- tive development environments, as a means of providing tomatic type checks for memory operations, and whose im- feature-rich, portable applications with minimal develop- plementation requires minimal hardware changes. We also ment costs. propose hardware support for dynamic type prediction to Because of their power and space constraints, embedded reduce the cost of failed type checks. -
Intel® Core™2 Duo Mobile Processor for Intel® Centrino® Duo Mobile Processor Technology
Intel® Core™2 Duo Mobile Processor for Intel® Centrino® Duo Mobile Processor Technology Datasheet September 2007 Document Number: 314078-004 INFORMATIONLegal Lines and Disclaimers IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH INTEL® PRODUCTS. NO LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANTED BY THIS DOCUMENT. EXCEPT AS PROVIDED IN INTEL'S TERMS AND CONDITIONS OF SALE FOR SUCH PRODUCTS, INTEL ASSUMES NO LIABILITY WHATSOEVER, AND INTEL DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY, RELATING TO SALE AND/OR USE OF INTEL PRODUCTS INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT. UNLESS OTHERWISE AGREED IN WRITING BY INTEL, THE INTEL PRODUCTS ARE NOT DESIGNED NOR INTENDED FOR ANY APPLICATION IN WHICH THE FAILURE OF THE INTEL PRODUCT COULD CREATE A SITUATION WHERE PERSONAL INJURY OR DEATH MAY OCCUR. Intel may make changes to specifications and product descriptions at any time, without notice. Designers must not rely on the absence or characteristics of any features or instructions marked "reserved" or "undefined." Intel reserves these for future definition and shall have no responsibility whatsoever for conflicts or incompatibilities arising from future changes to them. The information here is subject to change without notice. Do not finalize a design with this information. The products described in this document may contain design defects or errors known as errata which may cause the product to deviate from published specifications. Current characterized errata are available on request. Contact your local Intel sales office or your distributor to obtain the latest specifications and before placing your product order. -

Design and Implementation of Low Power 5 Stage Pipelined 32 Bits MIPS Processor Using 28Nm Technology
International Journal of Innovative Technology and Exploring Engineering (IJITEE) ISSN: 2278-3075, Volume-8 Issue-4S2 March, 20 Design and implementation of low power 5 stage Pipelined 32 bits MIPS Processor using 28nm Technology V.Prasanth, V.Sailaja, P.Sunitha, B.Vasantha Lakshmi processor. The operations used by MIPS processor in Abstract— MIPS is a simple streamlined highly scalable instruction set which are generally used to access memory in RISC architecture is most used in android base devices and best MIPS processor are load and Store and other operations suited for portable mobile devices. This Paper presents a design which are remaining are performed on register to register of 5 stage pipelined 32 bit MIPS processor on a 28nm basis [2] this results in more clear instruction set design Technology. The processor is designed using Harvard architecture. The most important feature of pipelining is where it allows execution of one instruction-per cycle rate. performance and speed of the processor, this results in increase The pipelining uses parallelism at instruction level to execute of device power. To reduce dynamic power using RTL clock multiple instructions simultaneously using a single processor gating inside FPGA device we presented a novel approach in this [2]. The major disadvantage with MIPS processor design is paper. Design functionality in terms of area power and speed is dynamic power consumption results due to clock power and analyzed using kintex 7 platform board. switching-activity. Clock Gating is a method which employed in the design to reduce power consumption [17] by Keywords: RISC,MIPS, Clock Gating, Dynamic Power, reducing switching activity of non active blocks. -

5 Microprocessors
Color profile: Disabled Composite Default screen BaseTech / Mike Meyers’ CompTIA A+ Guide to Managing and Troubleshooting PCs / Mike Meyers / 380-8 / Chapter 5 5 Microprocessors “MEGAHERTZ: This is a really, really big hertz.” —DAVE BARRY In this chapter, you will learn or all practical purposes, the terms microprocessor and central processing how to Funit (CPU) mean the same thing: it’s that big chip inside your computer ■ Identify the core components of a that many people often describe as the brain of the system. You know that CPU CPU makers name their microprocessors in a fashion similar to the automobile ■ Describe the relationship of CPUs and memory industry: CPU names get a make and a model, such as Intel Core i7 or AMD ■ Explain the varieties of modern Phenom II X4. But what’s happening inside the CPU to make it able to do the CPUs amazing things asked of it every time you step up to the keyboard? ■ Install and upgrade CPUs 124 P:\010Comp\BaseTech\380-8\ch05.vp Friday, December 18, 2009 4:59:24 PM Color profile: Disabled Composite Default screen BaseTech / Mike Meyers’ CompTIA A+ Guide to Managing and Troubleshooting PCs / Mike Meyers / 380-8 / Chapter 5 Historical/Conceptual ■ CPU Core Components Although the computer might seem to act quite intelligently, comparing the CPU to a human brain hugely overstates its capabilities. A CPU functions more like a very powerful calculator than like a brain—but, oh, what a cal- culator! Today’s CPUs add, subtract, multiply, divide, and move billions of numbers per second. -
PCE-3132 Socket-M 478 Intel® Core™2 Duo/ Core Duo/ Celeron® M Pcie Half-Size SBC with PCI Express/VGA/LVDS/Gbe LAN Startup Manual
PCE-3132 Socket-M 478 Intel® Core™2 Duo/ Core Duo/ Celeron® M PCIe Half-size SBC with PCI Express/VGA/LVDS/GbE LAN Startup Manual Packing List Specifications Before you begin installing your card, please make sure that General the following items have been shipped: • CPU: Intel Core 2 Duo/Core Duo, and Intel Celeron M • 1 x PCE-3132 series half-sized SBC processors on 65 nm • 1 x Startup manual • BIOS: Award 8 Mbit Flash BIOS • 1 x Utility disk/CD driver • System chipset: Intel 945GME + ICH7M-DH • 1 x Y cable for PS/2 keyboard, mouse p/n: 1700060202 • System memory: 2x200 pin SODIMM sockets, support- • 1 x 4 ports USB cable (2.0 mm) p/n: 1700008887 ing Dual channel DDR2 400/533/667 MHz, up to 4 GB • 1 x Parallel Port Cable (2.0 mm) p/n: 1700002223 • 2nd cache memory: Depends on CPU • 2 x Serial ATA HDD data cable p/n: 1700003194 • Serial ports: Four serial ports: • 2 x Serial ATA HDD power cable p/n: 1703150102 - COM1,3,4: RS232 • 1 x 2-port COM cable kit p/n: 1700008762 - COM2: RS232/422/485 • Jumper pack p/n: 9689000002 • Parallel port: One parallel port, supports SPP/EPP/ECP • CPU Cooler p/n: 1750000348 • Keyboard/Mouse connector: Supports standard PC/AT Keyboard and a PS/2 Mouse If any of these items are missing or damaged, please con- • Power management: Supports Power Saving Mode tact your distributor or sales representative immediately. including Normal/Standard/Suspend modes. APM 1.2 compliant Optional Accessories • USB: 4 onboard pin headers • 2-port COM cable kit p/n: 1700008762 • SSD: Supports CompactFlash Card Types I/II • HDAudio card p/n: PCE-AUDIO-HDA1E • Watchdog timer: 0 ~ 255 sec.