Evaluation of Urban Air Mobility Systems Considering Regulatory and Operational Constraints
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

THE ROADMAP to Scalable Urban Air Mobility
THE ROADMAP to scalable urban air mobility White paper 2.0 We bring urban air mobility to life. FOREWORD BY THE CEO MAKING HISTORY When I joined Volocopter in 2015, an amazing team of innovators had already made aviation history. With a dream, a yoga ball,1 and a new configuration of distributed electric vertical takeoff and landing (eVTOL) technology, Volocopter pioneered the way for electric passenger flights as early as 2011. Since then, Volocopter has relentlessly pursued its dream and continued to make great strides. I have witnessed the idea of electric flight grow into a fully-fledged initiative to bring seamless urban air mobility to cities. It’s true, we developed a revolutionary aircraft. But in fact, we launched the creation of an entire industry. The yoga ball evolved into the first certified multicopter, and Volocopter evolved to become the world’s first and only electric multicopter company with Design Organisation Approval (DOA) from the European Union Aviation Safety Agency (EASA). Five years, six very public flights, and two city commitments later, Volocopter continues to lead the pack as the “Pioneer of Urban Air Mobility” both in certification and in robust partnerships. We have set the stage for the next transformative industry. BRINGING URBAN AIR MOBILITY TO LIFE As the category-defining company, we are investing in multidimensional mobility. And as a team, we are engineering it. Volocopter has combined cutting-edge eVTOL technology with a holistic partnership approach as we build the world’s first fully electric, scalable UAM business for affordable air taxi services in cities. -

3.0 the Autonomous Transportation System (ATS)
3.0 The Autonomous Transportation System (ATS) Concept The world is on the cusp of a completely new mode of transportation using electric powered, networked, fully autonomous vehicles. A new Autonomous Transportation System (ATS) is needed to facilitate this transformation within the U.S., to include standards for the development, manufacture and operation of autonomous Aerial Vehicles (AVs) and Ground Vehicles (GVs). This document proposes strategic-level standards for the ATS and for autonomous AVs and GVs, to enable safe, secure, reliable and swift transport of cargo and human passengers. Further, it proposes standards to safely incorporate traditional manually operated ground vehicles, pilot-controlled aircraft, and smalls drones into the system – initially and perpetually. Topics, features, and design solutions presented in this document are the proposed strategic- level standards. The proposed new ATS includes the people, facilities, and hardware/software (HW/SW) required to manage, operate, and monitor all GVs operating on the ground, and all AVs operating within the authorized public airspace. The standards will ensure cargo, passengers, and people and property on the ground are kept safe, now and into the future. OVER’s vision and intention is that this proposed ATS be discussed and revised as necessary by transportation and aerospace industry experts, government experts (DOT, FAA, etc.), and the American public. Once revised, it can provide a baseline for final standards to govern the design, production, integration and operation of large, fully autonomous GVs traversing public roads and AVs flying within the public airspace. The final ATS will ensure that all autonomous GVs/AVs are safe, secure, reliable and fully compatible with the HW, SW, networking and communication requirements, regardless of manufacturer, or will not be allowed to operate. -
Future of Vertical Flight
www.vtol.org Kenneth Swartz, Regional Director – Americas The Vertical Flight Society www.vtol.org | [email protected] Kitty Hawk Cora © Vertical Flight Society: CC-BY-SA 4.0 © Vertical Flight Society: CC-BY-SA 4.0 Released March 2018 1 www.vtol.org . Founded as “The American Helicopter Society, Inc.” 75 years ago in Connecticut on Feb. 25, 1943 – “For the purpose of collecting, compiling and disseminating information concerning the helicopter” – Sikorsky Aircraft received its order for the first American helicopters on January 5, 1943 (28 XR-4 helicopters) . The first and longest-serving helicopter non-profit Sikorsky XR-4 helicopter – Founding members Igor Sikorsky, Arthur Young, Frank Piasecki, Courtesy of Sikorsky Aircraft Corp. Stanley Hiller, Reggie Brie, A.A. Griffiths, etc. – Included engineers, pilots, operators and presidents from industry, academia and government in Allied countries . Now 6,000 individual and 95 corporate members . Advancing vertical flight worldwide First Annual AHS Awards Banquet Born with the American Helicopter Industry Oct. 7, 1944 © Vertical Flight Society: CC-BY-SA 4.0 2 www.vtol.org © Vertical Flight Society: CC-BY-SA 4.0 3 www.vtol.org . The international professional society for those working to advance vertical flight – Founded in 1943 as the American Helicopter Society – Everything from VTOL MAVs/UAS to helicopters and eVTOL to STOVL (everything vertical except rockets) CFD of Joby S4, Aug 2015 . Expands knowledge about vertical flight technology and promotes its application around the world . Advances safety and acceptability . Advocates for vertical flight R&D funding . Helps educate and support today’s and tomorrow’s vertical flight engineers and leaders VFF Scholarship Winners at AHS Forum 71, May 2015 © Vertical Flight Society: CC-BY-SA 4.0 4 www.vtol.org . -

The the Roadable Aircraft Story
www.PDHcenter.com www.PDHonline.org Table of Contents What Next, Slide/s Part Description Flying Cars? 1N/ATitle 2 N/A Table of Contents 3~53 1 The Holy Grail 54~101 2 Learning to Fly The 102~155 3 The Challenge 156~194 4 Two Types Roadable 195~317 5 One Way or Another 318~427 6 Between the Wars Aircraft 428~456 7 The War Years 457~572 8 Post-War Story 573~636 9 Back to the Future 1 637~750 10 Next Generation 2 Part 1 Exceeding the Grasp The Holy Grail 3 4 “Ah, but a man’s reach should exceed his grasp, or what’s a heaven f?for? Robert Browning, Poet Above: caption: “The Cars of Tomorrow - 1958 Pontiac” Left: a “Flying Auto,” as featured on the 5 cover of Mechanics and Handi- 6 craft magazine, January 1937 © J.M. Syken 1 www.PDHcenter.com www.PDHonline.org Above: for decades, people have dreamed of flying cars. This con- ceptual design appeared in a ca. 1950s issue of Popular Mechanics The Future That Never Was magazine Left: cover of the Dec. 1947 issue of the French magazine Sciences et Techniques Pour Tous featur- ing GM’s “RocAtomic” Hovercar: “Powered by atomic energy, this vehicle has no wheels and floats a few centimeters above the road.” Designers of flying cars borrowed freely from this image; from 7 the giant nacelles and tail 8 fins to the bubble canopy. Tekhnika Molodezhi (“Tech- nology for the Youth”) is a Russian monthly science ma- gazine that’s been published since 1933. -

When Will Cars Fly? Microtek Newsletter – April 2021
When will cars fly? Microtek Newsletter – April 2021 I know the title sounds funny but it is a reality that we are inventing flying cars right now. The demand is there (in so- many-ways) and the technology is advancing to allow it to become a reality. As of March 20, 2021 – there were 14 prototypes of flying cars in development. We will discuss what is being developed now and where our flying-car future may evolve to. There are many billionaires with large funds to help develop the prototypes of this technology. When you combine the potential future profits and the “bragging” rights, you will understand that billions of dollars are being spent now with billions more to be spent in the near future. I would like to illustrate the different types of “flying” cars we have now. WHAT IS A FLYING CAR The definition of a flying car is a vehicle that can drive on the road and fly in the air. There are two main types of flying cars. You have models that follow the principals of an airplane and models that follow the principals of a helicopter/drone. The difference is defined in the following way. Airplanes need a runway to reach a certain speed before it can leave the ground. Helicopters/drones can go straight up into the air without needing to reach a certain speed first. Helicopters have one or two sets of exposed blades. Drones have two or more sets of enclosed blades. Enclosed blades are much safer on public vehicles and they are much more likely to be approved for use by non-professionals. -

Update to FAA Historical Chronology, 1997-2011
1997-2014 Update to FAA Historical Chronology: Civil Aviation and the Federal Government, 1926-1996 (Washington, DC: Federal Aviation Administration, 1998) 1997 January 2, 1997: The Federal Aviation Administration (FAA) issued an airworthiness directive requiring operators to adopt procedures enabling the flight crew to reestablish control of a Boeing 737 experiencing an uncommanded yaw or roll – the phenomenon believed to have brought down USAir Flight 427 at Pittsburgh, Pennsylvania, in 1994. Pilots were told to lower the nose of their aircraft, maximize power, and not attempt to maintain assigned altitudes. (See August 22, 1996; January 15, 1997.) January 6, 1997: Illinois Governor Jim Edgar and Chicago Mayor Richard Daley announced a compromise under which the city would reopen Meigs Field and operate the airport for five years. After that, Chicago would be free to close the airport. (See September 30, 1996.) January 6, 1997: FAA announced the appointment of William Albee as aircraft noise ombudsman, a new position mandated by the Federal Aviation Reauthorization Act of 1996 (Public Law 104-264). (See September 30, 1996; October 28, 1998.) January 7, 1997: Dredging resumed in the search for clues in the TWA Flight 800 crash. The operation had been suspended in mid-December 1996. (See July 17, 1996; May 4, 1997.) January 9, 1997: A Comair Embraer 120 stalled in snowy weather and crashed 18 miles short of Detroit [Michigan] Metropolitan Airport, killing all 29 aboard. (See May 12, 1997; August 27, 1998.) January 14, 1997: In a conference sponsored by the White House Commission on Aviation Safety and Security and held in Washington, DC, at George Washington University, airline executives called upon the Clinton Administration to privatize key functions of FAA and to install a nonprofit, airline-organized cooperative that would manage security issues. -

Cost Analysis of Evtol Configuration Design for an Air Ambulances System in Japan
Purdue University Purdue e-Pubs CESUN Conference Cost Analysis of eVTOL Configuration Design for an Air Ambulances System in Japan Yusuke Mihara Keio University Payuhavorakulchai Pawnlada Keio University Aki Nakamoto Keio University Tsubasa Nakamura Keio University Masaru Nakano Keio University Follow this and additional works at: https://docs.lib.purdue.edu/cesun Mihara, Yusuke; Pawnlada, Payuhavorakulchai; Nakamoto, Aki; Nakamura, Tsubasa; and Nakano, Masaru, "Cost Analysis of eVTOL Configuration Design for an Air Ambulances System in Japan" (2021). CESUN Conference. 3. https://docs.lib.purdue.edu/cesun/cesun2020/papers/3 This document has been made available through Purdue e-Pubs, a service of the Purdue University Libraries. Please contact [email protected] for additional information. Cost Analysis of eVTOL Configuration Design for an Air Ambulance System in Japan Yusuke Mihara Payuhavorakulchai Pawnlanda Aki Nakamoto Dept. of System Design and Dept. of System Design and Dept. of System Design and Management Management Management Keio University Keio University Keio University Yokohama, Japan Yokohama, Japan Yokohama, Japan [email protected] [email protected] [email protected] Tsubasa Nakamura Masaru Nakano Dept. of System Design and Dept. of System Design and Management Management Keio University Keio University Yokohama, Japan Yokohama, Japan [email protected] [email protected] Abstract—Electric-vertical-takeoff-and-landing (eVTOL) cost per seat mile by 26% compared to helicopters [3]. The aircraft, known as urban air mobility or flying cars, are being safety of air EMS (Emergent Medical Services)will also be considered for widespread use as air taxis, emergency medical further increased by the development of flight controls, sense- transportation, sightseeing vehicles, and rural transportation, and-avoid technologies, and fully autonomous aircraft, owing to their reduced-size, low-cost, and low-noise consequently reducing the current problem of a high crash rate characteristics. -

Study on the Societal Acceptance of Urban Air Mobility in Europe
Study on the societal acceptance of Urban Air Mobility in Europe May 19, 2021 Confidential and proprietary. Any use of this material without specific permission of EASA is strictly prohibited. 8A0846_Report_Spreads_210518_Langversion.indd 1 19.05.2021 12:55:16 Further information and the full survey insights are available at easa.europa.eu/UAM This study has been carried out for EASA by McKinsey & Company upon award of a specific contract implementing a running multiple framework contract for the provision of consultancy services. Consequently, it does not necessarily express the views of EASA itself, nor should it be relied upon as a statement, as any form of warranty, representation, undertaking, contractual, or other binding commitment upon EASA. Ownership of all copyright and other IPR in this material including any documentation, data and technical information, remains vested to EASA. All logo, copyrights, trademarks, that may be contained within, are the property of their respective owners. Reproduction of this study, in whole or in part, is permitted under the condition that this Disclaimer remains clearly and visibly affixed in full at all times with such reproduced part. This study has measured the attitude of the EU society towards UAM early 2021, well in advance of future deployment in EU cities foreseen around 2024-2025. The results have been generated with best effort at this point in time, however public perception may change over time once citizens are exposed to actual UAM operations. 8A0846_Report_Spreads_210518_Langversion.indd 2 19.05.2021 12:55:16 Executive Summary New technologies such as the enhancement of battery technologies and electric propulsion as well as major investments made into start-ups are enabling the development of new vertical take-off and landing Urban Air Mobility (UAM) aircraft. -

The Future of Aviation
THE FUTURE OF AVIATION BY CHARLES BOMBARDIER BY CHARLES BOMBARDIER NGAP 2018 AVIATION HAS ALWAYS BEEN A DRIVER FOR INNOVATION Today we build on the work of those who came and went before us. Tinkerers, designers, engineers are constantly creating new ideas and concepts that will shape the world of tomorrow. This book represents a few of those dreams. We hope that it will be a source of inspiration for innovators and also encouragement for the next generation of aviation professionals! To learn more about the Future of Flight, and to consider entering your ideas into the THE FUTURE OF AVIATION national aviation innovation competitions which ICAO is helping countries to conduct around the world during 2019, please visit: icao.int/futureaviation THE FUTURE OF AVIATION ICAO - NGAP 2019 START-UPS & COMPANIES Aerofex, Aeromobil, Arca, Aurora, Cartivator, DeLorean Aerospace, EHANG, FlytCycle, Hirobo, Hoversurf, Hybrid Air Vehicles, Kitty Hawk, Leonardo, Lilium, Omniboard, Opener, Pale V, Parsifal, UBER, UDES, Volocopter, XTI Aircraft, Zapata INDUSTRIAL DESIGNERS Jorge Ciprian, Adolfo Esquivel, Ray Mattison, Brian R. Miller, Martin Rico, Robin Ritter, Martin Rojtenberg, Abhishek Roy Ashish Thulkar ARTWORK AND LAYOUT Marie-Claude Meilleur DRAFTING AND EDITING Charles Bombardier, Danielle Ellis PHOTOGRAPHER Christine Muschi, Henrickson PUBLISHER ICAO 999 Robert-Bourassa Boulevard, Montréal, Québec H3C 5H7, Canada E-MAIL [email protected] R ICAO 2018 All rights reserved. Any partial or complete, direct or indirect, reproduction, representation, broadcasting, translation, distribution, use, sharing or transferof this content by any means whatsoever is forbidden unless prior formal authorisation from the publisher. LEGAL DEPOSIT: DECEMBER 2018 TABLE OF CONTENTS ABOUT THE AUTHOR p. -

White Paper on Urban Air Mobility Systems
Table of Content Abstract.................................................................................................................1 Chapter 1 The UAM Concept................................................................... 2 Proposed Basic UAM Structure.....................................................................................3 Key components:........................................................................................................... 3 Command-and-Control Platform............................................................................... 9 Navigation and Positioning System.........................................................................10 Base Points.................................................................................................................... 10 Interface......................................................................................................................... 11 Key UAM Characteristics...............................................................................................12 What makes UAM a viable new transportation mode?..........................................13 Key differences between UAM and the current airline model.........................13 Key differences between AAVs and UAVs............................................................14 Key differences between AAVs and helicopters................................................. 14 Key advantages of UAM vs. existing ridesharing................................................15 Competition -
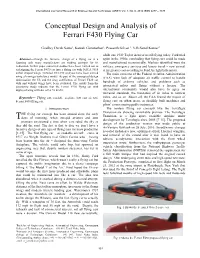
Conceptual Design and Analysis of Ferrari F430 Flying Car
International Journal of Research in Engineering and Technology (IJRET) Vol. 1, No. 6, 2012 ISSN 2277 – 4378 Conceptual Design and Analysis of Ferrari F430 Flying Car Godfrey Derek Sams1, Kamali Gurunathan1, Prasanth Selvan 1, V.R.Sanal Kumar2 while one 1949 Taylor Aerocar is still flying today. Ford tried Abstract—Though the lucrative design of a flying car is a again in the 1950s, concluding that flying cars could be made daunting task many manufactures are making attempts for its and manufactured economically. Markets identified were the realization. In this paper numerical studies have been carried out to military, emergency services and luxury travel – now served, redesigning the Ferrari F430 car into a flying car with NACA 9618 at far greater cost according to Ford, by light helicopters. airfoil shaped wings. Detailed 3D CFD analyses have been carried The main concerns of the Federal Aviation Administration using a k-omega turbulence model. As part of the conceptual design (FAA) were lack of adequate air traffic control to handle optimization the lift and the drag coefficients of Ferrari F430 car with and without wings have been evaluated. The results from the hundreds of airborne vehicles, and problems such as parametric study indicate that the Ferrari F430 flying car with intoxicated pilots and flying without a license. The deployed wing will take off at 53 km/hr. international community would also have to agree on universal standards, the translation of air miles to nautical Keywords— Flying car, roadable airplane, low cost air taxi, miles, and so on. Above all, the FAA feared the impact of Ferrari F430 flying car. -

2 1702 1Jahrbuchyearbook
2 0 1 Jahrbuch20Yearbook17 Yearbook Jahrbuch 04 foreword bavarian minister 05 of economic affairs Ilse Aigner Sehr geehrte Damen und Herren Dear Ladies and Gentlemen Bayerische Wirtschaftsministerin Bavarian Minister of Economic Affairs Die stetig steigende Nachfrage nach Mobilität und eine zuneh- The continuous increase in demand for mobility and the mende internationale Vernetzung in der Wirtschaft stellen den growing international economic network face the avia- Luftverkehr vor große Herausforderungen. Die Luftfahrt hat sich tion industry with major challenges. Aviation has set das ambitionierte Ziel gesetzt, diesen steigenden Bedarf mit itself ambitious targets for meeting the growing demand einem signifikant verbesserten ökologischen Fußabdruck zu rea- with a significantly improved ecological footprint. This lisieren. Hierfür sind radikal neue technologische und ökonomi- requires radically new technological and business con- sche Konzepte erforderlich. cepts. In Bayern sind mehr als 60 000 Personen in der Luft- und More than 60,000 people are employed in the aero- Raumfahrt beschäftigt. Sie erwirtschaften ein jährliches Umsatz- space industry in Bavaria. They generate annual revenues volumen von rund sieben Milliarden EUR. Von der Forschung of around 7 billion euros. From research and design über den Entwurf bis zum Produkt und dessen langfristige towards the product and its long-term support, all areas Betreuung werden alle Teilbereiche mit hoher Kompetenz ab- are covered with a high level of competence. gedeckt. In order to make Bavaria’s industrial base future- Um die industrielle Basis Bayerns auch langfristig zukunfts- proof in the long term, it is necessary to identify new sicher zu machen, ist es notwendig, frühzeitig neue Technolo- technologies at an early stage and exploit their poten- gien zu identifizieren und Potenziale nutzbar zu machen.