A New Method for Time-Of-Day Breakpoints Determination Based on Clustering and Image Processing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

World Bank Document
CONFORMED COPY Public Disclosure Authorized LOAN NUMBER 7616-CN Loan Agreement Public Disclosure Authorized (Wenchuan Earthquake Recovery Project) between PEOPLE’S REPUBLIC OF CHINA Public Disclosure Authorized and INTERNATIONAL BANK FOR RECONSTRUCTION AND DEVELOPMENT Dated March 20, 2009 Public Disclosure Authorized LOAN AGREEMENT AGREEMENT dated March 20, 2009, between PEOPLE’S REPUBLIC OF CHINA (“Borrower”) and INTERNATIONAL BANK FOR RECONSTRUCTION AND DEVELOPMENT (“Bank”). The Borrower and the Bank hereby agree as follows: ARTICLE I – GENERAL CONDITIONS; DEFINITIONS 1.01. The General Conditions (as defined in the Appendix to this Agreement) constitute an integral part of this Agreement. 1.02. Unless the context requires otherwise, the capitalized terms used in the Loan Agreement have the meanings ascribed to them in the General Conditions or in the Appendix to this Agreement. ARTICLE II – LOAN 2.01. The Bank agrees to lend to the Borrower, on the terms and conditions set forth or referred to in this Agreement, an amount equal to seven hundred ten million Dollars ($710,000,000), as such amount may be converted from time to time through a Currency Conversion in accordance with the provisions of Section 2.07 of this Agreement (“Loan”), to assist in financing the project described in Schedule 1 to this Agreement (“Project”). 2.02. The Borrower may withdraw the proceeds of the Loan in accordance with Section IV of Schedule 2 to this Agreement. 2.03. The Front-end Fee payable by the Borrower shall be equal to one quarter of one percent (0.25%) of the Loan amount. The Borrower shall pay the Front-end Fee not later than sixty (60) days after the Effective Date. -
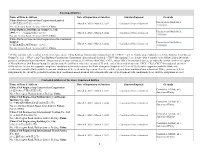
Sanctioned Entities Name of Firm & Address Date
Sanctioned Entities Name of Firm & Address Date of Imposition of Sanction Sanction Imposed Grounds China Railway Construction Corporation Limited Procurement Guidelines, (中国铁建股份有限公司)*38 March 4, 2020 - March 3, 2022 Conditional Non-debarment 1.16(a)(ii) No. 40, Fuxing Road, Beijing 100855, China China Railway 23rd Bureau Group Co., Ltd. Procurement Guidelines, (中铁二十三局集团有限公司)*38 March 4, 2020 - March 3, 2022 Conditional Non-debarment 1.16(a)(ii) No. 40, Fuxing Road, Beijing 100855, China China Railway Construction Corporation (International) Limited Procurement Guidelines, March 4, 2020 - March 3, 2022 Conditional Non-debarment (中国铁建国际集团有限公司)*38 1.16(a)(ii) No. 40, Fuxing Road, Beijing 100855, China *38 This sanction is the result of a Settlement Agreement. China Railway Construction Corporation Ltd. (“CRCC”) and its wholly-owned subsidiaries, China Railway 23rd Bureau Group Co., Ltd. (“CR23”) and China Railway Construction Corporation (International) Limited (“CRCC International”), are debarred for 9 months, to be followed by a 24- month period of conditional non-debarment. This period of sanction extends to all affiliates that CRCC, CR23, and/or CRCC International directly or indirectly control, with the exception of China Railway 20th Bureau Group Co. and its controlled affiliates, which are exempted. If, at the end of the period of sanction, CRCC, CR23, CRCC International, and their affiliates have (a) met the corporate compliance conditions to the satisfaction of the Bank’s Integrity Compliance Officer (ICO); (b) fully cooperated with the Bank; and (c) otherwise complied fully with the terms and conditions of the Settlement Agreement, then they will be released from conditional non-debarment. If they do not meet these obligations by the end of the period of sanction, their conditional non-debarment will automatically convert to debarment with conditional release until the obligations are met. -
2016 Annual Report.PDF
HAITONG SECURITIES CO., LTD. 海通證券股份有限公司 Annual Report 2016 2016 Annual Report 年度報告 CONTENTS Section I Definition and Important Risk Warnings 3 Section II Company Profile and Key Financial Indicators 7 Section III Summary of the Company’s Business 23 Section IV Report of the Board of Directors 28 Section V Significant Events 62 Section VI Changes in Ordinary Share and Particulars about Shareholders 91 Section VII Preferred Shares 100 Section VIII Particulars about Directors, Supervisors, Senior Management and Employees 101 Section IX Corporate Governance 149 Section X Corporate Bonds 184 Section XI Financial Report 193 Section XII Documents Available for Inspection 194 Section XIII Information Disclosure of Securities Company 195 IMPORTANT NOTICE The Board, the Supervisory Committee, Directors, Supervisors and senior management of the Company represent and warrant that this annual report (this “Report”) is true, accurate and complete and does not contain any false records, misleading statements or material omission and jointly and severally take full legal responsibility as to the contents herein. This Report was reviewed and passed at the twenty-third meeting of the sixth session of the Board. The number of Directors to attend the Board meeting should be 13 and the number of Directors having actually attended the Board meeting was 11. Director Li Guangrong, was unable to attend the Board meeting in person due to business travel, and had appointed Director Zhang Ming to vote on his behalf. Director Feng Lun was unable to attend the Board meeting in person due to business travel and had appointed Director Xiao Suining to vote on his behalf. -

World Bank Document
RP360 V5 World Bank Financed Sichuan Urban Development Project (SUDP) Mianyang Sub-project Remaining Loan Adjustment- Roads & Supporting Infrastructure Construction in the Cluster Zone of Public Disclosure Authorized Relocated Industries Through Post-disaster Reconstruction in Xinglong Area of Science & Education Pioneer Park of Mianyang Science and Technology City Public Disclosure Authorized Resettlement Action Plan Public Disclosure Authorized Mianyang Science and Technology City Development and Investment (Group) Co., Ltd. November 2009 Public Disclosure Authorized World Bank Financed SUDP Mianyang Sub-project Remaining Loan Adjustment-Roads & Supporting Infrastructure Construction in the Cluster Zone of Relocated Industries Through Post-disaster Reconstruction in Xinglong Area of Science & Education Pioneer Park of Mianyang Science and Technology City Compilation Description The Resettlement Action Plan (RAP) is of great importance to smooth implementation of Science & Education Pioneer Park Project in Mianyang, Sichuan, especially to those affected by land acquisition and house demolition within the scope of the Project. Local governments, Mianyang Science and Technology City Development Investment (Group) Co., Ltd. and Southwest Municipal Engineering Design & Research Institute of China, which is a design institute, attempt to minimize adverse impact of the Project on local residents through constantly repeated optimum designs. Mianyang Science & Technology City Development Investment (Group) Co., Ltd. has prepared the RAP with -

Online Appendix (474.67
How do Tax Incentives Aect Investment and Productivity? Firm-Level Evidence from China ONLINE APPENDIX Yongzheng Liu School of Finance Renmin University of China E-mail: [email protected] Jie Mao School of International Trade and Economics University of International Business and Economics E-mail: [email protected] 1 Appendix A: Supplementary Figures and Tables Figure A1: The Distribution of Estimates for the False VAT Reform Variable Panel A. ln(Investment) Panel B. ln(TFP, OP method) 15 50 40 10 30 20 5 Probabilitydensity Probability density 10 0 0 -0.10 0.00 0.10 0.384 -0.02 0.00 0.02 0.089 The simulated VAT reform estimate The simulated VAT reform estimate reference normal, mean .0016 sd .03144 reference normal, mean .00021 sd .00833 Notes: The gure plots the density of the estimated coecients of the false VAT reform variable from the 500 simulation tests using the specication in Column (3) of Table 2. The vertical red lines present the treatment eect estimates reported in Column (3) of Table 2. Source: Authors' calculations. 2 Table A1: Evolution of the VAT Reform in China Stage of the Reform Industries Covered (Industry Classication Regions Covered (Starting Codes) Time) Machine and equipment manufacturing (35, 36, 39, 40, 41, 42); Petroleum, chemical, and pharmaceutical manufacturing (25, 26, 27, 28, 29, 30); Ferrous and non-ferrous metallurgy (32, 33); The three North-eastern provinces: Liaoning (including 1 (July 2004) Agricultural product processing (13, 14, 15, 17, 18, 19, 20, 21, Dalian city), Jilin and Heilongjiang. 22); Shipbuilding (375); Automobile manufacturing (371, 372, 376, 379); Selected military and hi-tech products (a list of 249 rms, 62 of which are in our sample). -

Table of Codes for Each Court of Each Level
Table of Codes for Each Court of Each Level Corresponding Type Chinese Court Region Court Name Administrative Name Code Code Area Supreme People’s Court 最高人民法院 最高法 Higher People's Court of 北京市高级人民 Beijing 京 110000 1 Beijing Municipality 法院 Municipality No. 1 Intermediate People's 北京市第一中级 京 01 2 Court of Beijing Municipality 人民法院 Shijingshan Shijingshan District People’s 北京市石景山区 京 0107 110107 District of Beijing 1 Court of Beijing Municipality 人民法院 Municipality Haidian District of Haidian District People’s 北京市海淀区人 京 0108 110108 Beijing 1 Court of Beijing Municipality 民法院 Municipality Mentougou Mentougou District People’s 北京市门头沟区 京 0109 110109 District of Beijing 1 Court of Beijing Municipality 人民法院 Municipality Changping Changping District People’s 北京市昌平区人 京 0114 110114 District of Beijing 1 Court of Beijing Municipality 民法院 Municipality Yanqing County People’s 延庆县人民法院 京 0229 110229 Yanqing County 1 Court No. 2 Intermediate People's 北京市第二中级 京 02 2 Court of Beijing Municipality 人民法院 Dongcheng Dongcheng District People’s 北京市东城区人 京 0101 110101 District of Beijing 1 Court of Beijing Municipality 民法院 Municipality Xicheng District Xicheng District People’s 北京市西城区人 京 0102 110102 of Beijing 1 Court of Beijing Municipality 民法院 Municipality Fengtai District of Fengtai District People’s 北京市丰台区人 京 0106 110106 Beijing 1 Court of Beijing Municipality 民法院 Municipality 1 Fangshan District Fangshan District People’s 北京市房山区人 京 0111 110111 of Beijing 1 Court of Beijing Municipality 民法院 Municipality Daxing District of Daxing District People’s 北京市大兴区人 京 0115 -

Annual Report 2019
HAITONG SECURITIES CO., LTD. 海通證券股份有限公司 Annual Report 2019 2019 年度報告 2019 年度報告 Annual Report CONTENTS Section I DEFINITIONS AND MATERIAL RISK WARNINGS 4 Section II COMPANY PROFILE AND KEY FINANCIAL INDICATORS 8 Section III SUMMARY OF THE COMPANY’S BUSINESS 25 Section IV REPORT OF THE BOARD OF DIRECTORS 33 Section V SIGNIFICANT EVENTS 85 Section VI CHANGES IN ORDINARY SHARES AND PARTICULARS ABOUT SHAREHOLDERS 123 Section VII PREFERENCE SHARES 134 Section VIII DIRECTORS, SUPERVISORS, SENIOR MANAGEMENT AND EMPLOYEES 135 Section IX CORPORATE GOVERNANCE 191 Section X CORPORATE BONDS 233 Section XI FINANCIAL REPORT 242 Section XII DOCUMENTS AVAILABLE FOR INSPECTION 243 Section XIII INFORMATION DISCLOSURES OF SECURITIES COMPANY 244 IMPORTANT NOTICE The Board, the Supervisory Committee, Directors, Supervisors and senior management of the Company warrant the truthfulness, accuracy and completeness of contents of this annual report (the “Report”) and that there is no false representation, misleading statement contained herein or material omission from this Report, for which they will assume joint and several liabilities. This Report was considered and approved at the seventh meeting of the seventh session of the Board. All the Directors of the Company attended the Board meeting. None of the Directors or Supervisors has made any objection to this Report. Deloitte Touche Tohmatsu (Deloitte Touche Tohmatsu and Deloitte Touche Tohmatsu Certified Public Accountants LLP (Special General Partnership)) have audited the annual financial reports of the Company prepared in accordance with PRC GAAP and IFRS respectively, and issued a standard and unqualified audit report of the Company. All financial data in this Report are denominated in RMB unless otherwise indicated. -
Based on Binary Logit Model Analysis on Characteristics of Sharing Bicycle Travel Taking Fucheng District of Mianyang City As an Example
Open Journal of Social Sciences, 2020, 8, 260-273 https://www.scirp.org/journal/jss ISSN Online: 2327-5960 ISSN Print: 2327-5952 Based on Binary Logit Model Analysis on Characteristics of Sharing Bicycle Travel Taking Fucheng District of Mianyang City as an Example Tingting An, Langong Hou* School of Civil Engineering and Architecture, Southwest University of Science and Technology, Mianyang, China How to cite this paper: An, T. T., & Hou, Abstract L. G. (2020). Based on Binary Logit Model Analysis on Characteristics of Sharing The study of urban shared bike travel characteristics is the premise of sus- Bicycle Travel Taking Fucheng District of tainable development of shared bike. In this paper, using the form of a ques- Mianyang City as an Example. Open Jour- tionnaire, the citizens of Fucheng District of Mianyang City were investigated nal of Social Sciences, 8, 260-273. https://doi.org/10.4236/jss.2020.84019 and obtained 98 Valid data. Analysis of travel characteristics is based on sur- vey data, and studies the factors affecting the use of shared bicycles, combined Received: December 18, 2019 with the establishment of travel behavior theory Logit model, with the aid of Accepted: April 17, 2020 Published: April 20, 2020 SPSS Calculate with software. The results showed that women were more likely to choose shared bike trips than men; those who chose shared bikes Copyright © 2020 by author(s) and tended to be younger; those who shared bikes were more favored by students Scientific Research Publishing Inc. and office workers; those with higher education levels were more likely to This work is licensed under the Creative Commons Attribution International choose shared bike trips; and those with higher education levels were the most License (CC BY 4.0). -

Mianyang Environmental Improvement Project
E1245 v 1 Sichuan Urban Development Project (SUDP) Financed by The World Bank Loan Public Disclosure Authorized Mianyang Environmental Improvement Project (Infrastructure and Access Improvement in Pioneer Park and Economic Development Zone) Public Disclosure Authorized Environmental Impact Assessment Report Public Disclosure Authorized (Draft for Review) Public Disclosure Authorized Sichuan Research Institute of Environmental Protection (SRIEP) September 2005 CONTENTS 1.0 INTRODUCTION …………………………………………… 1.1 Source and Necessity of the Proposed Project 1.2 Objectives, Principles and Methodology of the EIA 1.3 Policy, Legal and Administrative Framework 1.4 Standards for the EIA 1.5 Category of the EIA 1.6 Scope of the EIA 1.7 Factors of the EIA 1.8 Major Environmental Impacts and Protected Objects 1.9 Key Points of the EIA 1.10 Process and Procedure of the EIA 1.11 SRIEP and Staff of the EIA Core Team 2.0 PROJECT DESCRIPTION AND ANALYSeS …………………………………………………………….. 2.1 Project Description 2.2 Project Construction 2.3 Project Analysis 2.4 Conformity Analysis of Project and Local Development Plan 3.0 ENVIRONMENTAL SETTING ………………………….. (56) 3.1 Physical Environment 3.2 Socioeconomic Environment 3.3 Ecological Environment 3.4 Local Living Quality 3.5 Local Conditions of the Project Area 4.0 EXISTING ENVIRONMENTAL QUALITY ASSESSMENT ……………………………………………………………... (60) 4.1 Monitoring and Assessment of Existing Water Environment 4.2 Monitoring and Assessment of Existing Air Environment 4.3 Monitoring and Assessment of Existing Acoustic Environment 4.4 -

Annex 1 Hong Kong Special Administrative Region Government
Annex 1 Hong Kong Special Administrative Region Government Pre-selected Post-Sichuan Earthquake Restoration and Reconstruction Projects (First Batch) Duration Estimated Item Location Project Title Project Cost (month) (RMB 100m) Infrastructure Sub-total = 7.6560 A section of 303 Provincial Wenchuan County, 1 Road from Yingxiu to 24 7.6560 Aba Prefecture Wolong Education facilities Sub-total = 4.0981 Wenchuan County, Shuimo Secondary School 2 24 0.5570 Aba Prefecture in Wenchuan Cangxi County, Sichuan Cangxi Secondary 3 24 0.6523 Guangyuan School Santai County, Number 1 Secondary 4 24 0.7737 Mianyang School in Santai Jingyang District, Number 1 Primary School 5 24 0.1481 Deyang in Deyang Jingyang District, Huashan Road Primary 6 24 0.1604 Deyang School in Deyang Number 5 Secondary Jingyang District, 7 School Senior Secondary 24 1.8066 Deyang Section in Deyang Integrated social welfare facilities Sub-total = 1.3826 Chaotian District, Integrated social welfare 8 24 0.3384 Guangyuan services centre in Chaotian Yuanba District, Integrated social welfare 9 24 0.3168 Guangyuan services centre in Yuanba Youxian District, Integrated social welfare 10 24 0.2554 Mianyang services centre in Youxian Jingyang District, Integrated social welfare 11 24 0.4720 Deyang services centre in Deyang Duration Estimated Item Location Project Title Project Cost (month) (RMB 100m) Integrated social welfare facilities (cont.) Sub-total = 1.0269 Integrated social welfare Wangcang County, 12 services centre in 24 0.3744 Guangyuan Wangcang Cangxi County, Integrated -

Approved Document-Scientific Research Ethics Working Group of Medical Ethics Committees of Mianyang Central Hospital Approval No.:S-2018-085 Review Date:Sep
Medical Ethics Committee of Mianyang Central Hospital Approved Document-Scientific Research Ethics Working Group of Medical Ethics Committees of Mianyang Central Hospital Approval No.:S-2018-085 Review date:Sep. 2018 Project Development and Evaluation on In-Vitro Diagnostic Traceability System for chronic kidney disease Department Department of Laboratory Medicine Leader Yu-wei Yang Status New Approach □ Revised Approach after Necessary Modification Inspection Way □ Quick Review Meeting to Review □ Emergency Meeting to Review 1、 Proposal of this project 2、 Application form for ethical review of Mianyang Central Hospital Submitted 3、 Informed consent form Materials 4、 Subject instructions 5、 Others Consent □ Agree with the necessary amendments □ Review after necessary Review decision modification □ Termination or suspension Member for Quick Review Attending situation: There are 11 members who should attend, among which 5 are on Voting Results leave, 0 are absent, and 6 actually attend. of Review Voting result: 5 votes agree, 1 vote agree after necessary amendment, 0 vote review after Meeting necessary amendment, 0 vote terminate or suspend. There are 0 recused members. 1. All materials shall not be modified without approval of research ethics management; 2. In the process of the experiment (implementation), if main investigator, implementation conditions and any modification of Proposal or informed consent are changed, please submitte a new amendments for ethical review again without delay; 3. Report serious adverse events in time; Attentions 4. Timely submit a written report to ethics committee in case of any situation that may significantly affect the conduct of the trial (study) or increase the risk to the subject; 5. If suspending or terminating the test (study) in advance, please submit the suspension/termination report; 6. -

World Bank Document
SFG1980 Project for Post-earthquake Restoration and Reconstruction of Public Disclosure Authorized Municipal Infrastructures in Lushan County in Ya’an City with World Bank Loan Social Assessment Report Public Disclosure Authorized Public Disclosure Authorized Public Disclosure Authorized Sichuan Fontal Strategic-Consulting Co., Ltd. December, 2015 Contents 1. Project Overview ................................................................................................................................... 3 1.1 Project Background ......................................................................................................................... 3 1.2 Project Contents .............................................................................................................................. 3 1.2 Project Impact Evaluation Scope..................................................................................................... 7 1.2.1 Area under Direct Impact of Land Acquisition and Demolition for the Project........................... 7 1.2.2 Evaluation Scope in This Report ..................................................................................................... 8 2. Social assessment Indicators and Social Investigation ..................................................................... 10 2.1 Social assessment Method ............................................................................................................. 10 2.2 Evaluation Indicators for Project Social Impact ...........................................................................