Supporting Information
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

02 ÖPNV-Strategie-Pankow Lücken
Öffis vor! Unser Plan für Pankow ÖPNV-Zielkonzept des KV Pankow – Ausschnitt Niederschönhausen Das ÖPNV-Konzept enthält Maßnahmen mit unterschiedlichen Umsetzungs-Zeitpunkten Ziel-Umsetzung in ▪ Nur geringe Infrastrukturausbauen Beispiele: nächster Legislatur erforderlich ▪ Zusätzliche oder geänderte Buslinien Mehr und längere Züge im Regionalverkehr bis 2026 ▪ Wir setzen uns auf Senatsebene ▪ dafür ein, dass eine Maßnahmen- ▪ Taktverdichtungen u. Ausweitung von Betriebs- Umsetzung innerhalb der nächsten zeiten bei S-Bahn, U-Bahn, Tram und Bus 5 Jahre erfolgt ▪ Zusätzliche Haltestellen bei Bus- oder Tramlinien ▪ Ergänzende On-Demand-Angebote ▪ Weiterer Ausbau Barrierefreiheit Ziel-Umsetzung ▪ Größere Infrastrukturausbauen Beispiele: und/oder Neubeschaffung von nach 2026, ▪ Lückenschlüsse bei Tram, U-, S-Bahn Schienenfahrzeugen erforderlich Anstoßen innerhalb ▪ Neubau von Regionalbahnhöfen der nächsten ▪ Wir setzen uns dafür ein, dass die Maßnahmen-Umsetzung innerhalb ▪ Zusätzliche Bahnhöfe bei S- und U-Bahn Legislatur der nächsten 5 Jahre angestoßen ▪ Taktverdichtungen, die einen Streckenausbau wird (Planung, Finanzierung, erfordern Beschluss im Senat) Öffis-Vor! Unser Plan Für Pankow - Ausschnitt Niederschönhausen - Stand 6.8.2021 Seite 2 U2-Verlängerung bis Niederschönhausen und neuer Haltepunkt an der Wisbyer/Bornholmer Str. zur Verknüpfung mit Ost-West-Tramlinien Vorteile U2-Verlängerung bis Niederschönhausen ▪ Anschluss Niederschönhausen an das U-Bahn-Netz (8.500 Einwohner im 300m-Umkreis, 14.500 Einwohner im 600m-Min.-Umkreis) ▪ -

Berlin Metro Map by Zuti
Hohen Mühlenbeck Bernau Borgsdorf Neuendorf Bergfelde Schönfließ Mönchmühle Karow Röntgental Friedenstal Oranienburg Bernau Lehnitz Birkenwerder Hugenotten Navarrapl Buch Zepernick Guyotstr bei Bernau Rosenthal Nord Arnoux HAVEL Französisch Hauptstr Buchholz Kirche Frohnau Friedrich Engels 50 HAVEL Wiesenwinkel Blankenfelder Berlin Angerweg © Copyright Visual IT Ltd Nordendstr Rosenthaler ® Zuti and the Zuti logo are registered trademarks Hermsdorf www.zuti.co.uk Nordend Schillerstr Marienstr BERLIN WALL BERLIN Uhlandstr Pasewalker Blankenburg Hennigsdorf Waldemar Waidmannslust Pasewalker Platanenstr Heinrich Böll Blankenburger Weg Heiligensee Pankower Am Iderfenngraben Kuckhoffstr Pastor Niemöller Platz Schulzendorf Galenusstr Wittenau Hermann Hesse Grabbeallee Waldstr Pastor Niemöller Ahrensfelde REINICKENDORF Ahrensfelde Tschaikowskistr HAVEL Rathaus Würtzstr Wartenberg Reinickendorf Mendelstr Tegel Wilhelmsruh M1 Pankow Zingster Falkenberger Karl B Heinersdorf Prendener Welsestr Nerven Bürgerpark Stiftsweg Heinersdorf Falkenberg Barnimplatz Alt Tegel klinik Alt Reinickendorf Pankow Rathaus Zingster Ribnitzer Schönholz Pankow PANKOW Hohenschönhausen Eichborn Ahrenshooper Niemegker Borsigwerke damm Pankow Rothenbachstr Paracelsus Bad Kirche Prerower U8 Mehrower Holzhauser Lindauer Hansastr Malchower Wuhletalstr HAVEL Heinersdorf Kirche Otisstr Allee Wollankstr JUNGFERNHEIDE Residenzstr Pankow Feldtmannstr Rüdickenstr Max Hermann TEGELER SEE Am Wasserturm M5 Scharnweber Masurenstr M2 Pasedagplatz Berliner Allee Franz Neumann Am Steinberg -

PDF-Download
Netz Tarifbereich Berlin A B C A B Haltestellen in Berlin C Haltestellen in Brandenburg www.BVG.de Legende Service 4M 4t 0s 4u 24 Linie im 24-Stunden-Betrieb :hE 50 Guyotstr. Arnouxstr. M1 MetroTram täglich Waidmannslust S8 ABerlinerB Verkehrsbetriebe (BVG) Wittenau :8 Navarraplatz www.BVG.de M1 Hugenotten- S2 Rosenthal Nord Französisch Buchholz Kirche platz 20 Karl-Bonhoeffer- Hauptstr./Friedrich-Engels-Str. Blankenfelder Str. Linie im 20-Stunden-Betrieb Tegel Nervenklinik Wiesenwinkel Rosenthaler Str. M1 MetroTram-Abschnitte Schillerstr. M1 S25 Angerweg Marienstr./Pasewalker Str. Waldemarstr. Schönholz Nordendstr. Blankenburg 50 Straßenbahn Nordend Pasewalker Str./Blankenburger Weg www.s-bahn-berlin.de Friedrich-Engels-Str./Eichenstr. Wartenberg :gE 2 7 S+U-Bahn Heinrich-Böll-Str. S-Bahn Kundentelefon U6 Am Iderfenngraben Pankower Str. Kuckhoffstr. Umsteigemöglichkeit 030 29 74 33 33 U8 Pastor-Niemöller-Platz H.-Hesse-Str./ . S1 S2 eg Galenusstr. Grabbeallee/Pastor-Niemöller-Platz Waldstr. > Halt nur in Pfeilrichtung 5 S8 M4 M5 Tschaikowskistr. S Pankow-Heinersdorf M2 Zingster Str. 0A 128 StiftswMendelstr Heinersdorf Falkenberg M4 M17 0b 5 Bürgerpark Pankow Fern- und Regionalbahnhof Kurt-Schumacher-Platz Würtzstr. Rothenbachstr. Zingster Str./Ribnitzer Str. Welsestr. Stand: 14. Dezember 2014 :9U Osloer Str. Drontheimer Str. Rathaus Pankow Pankow Heinersdorf Kirche Falkenberger Ch./Prendener Str. Regionalbahnhof Redaktionsschluss: 30. September 2014 Kirche Ahrenshooper Str. Louise-Schroeder-Platz Osloer Str./ Am Wasserturm S Hohenschönhausen Tino-Schwierzina-Str. Prerower Platz Prinzenallee :9 Osram-Höfe S+U Pankow :2 Hansastr./Malchower Weg Rüdickenstr. 8 0 M2 2 5 Am Steinberg 1 S2 S8 S9 M4 3 Feldtmannstr. Arnimstr. :7 Ahrensfelde M1 Masurenstr. Prenzlauer Promenade/ M1 3 50 5 Stadion Buschallee/Hansastr. -

Fahrplan-S25.Pdf
S Teltow Stadt — S+U Friedrichstr. Bhf — S Hennigsdorf Bhf > S25 (gültig ab 13.12.2020) S25 S-Bahn Berlin GmbH Alle Züge 2. Klasse und f (Tarif des Verkehrsverbundes Berlin-Brandenburg [VBB]) montags bis freitags, nicht an Feiertagen Verkehrshinweise S Teltow Stadt ab 0 05 0 25 0 45 4 05 F20 23 45 S Lichterfelde Süd 0 08 0 28 0 48 4 08 23 48 S Osdorfer Str. 0 10 0 30 0 50 4 10 23 50 S Lichterfelde Ost Bhf 0 12 0 32 0 52 4 12 23 52 S Lankwitz 0 14 0 34 0 54 4 14 23 54 S Südende 0 16 0 36 0 56 4 16 23 56 S Priesterweg 0 19 0 39 0 59 4 19 23 59 S Südkreuz Bhf 0 21 0 41 1 01 4 21 0 01 S+U Yorckstr. S2 S25 S26 U7 0 24 0 44 1 04 4 24 0 04 S Anhalter Bahnhof 0 27 0 47 1 07 4 07 4 27 0 07 S+U Potsdamer Platz Bhf 0 29 0 49 1 09 4 09 4 29 0 09 S+U Brandenburger Tor 0 31 0 51 4 11 4 31 0 11 S+U Friedrichstr. Bhf O 0 33 0 53 4 13 4 33 0 13 S+U Friedrichstr. Bhf ab 0 33 0 53 4 13 4 33 0 13 S Oranienburger Str. 0 35 0 55 4 15 4 35 0 15 S Nordbahnhof 0 37 0 57 4 17 4 37 0 17 S Humboldthain 0 40 1 00 4 20 4 40 0 20 S+U Gesundbrunnen Bhf O 0 41 1 01 4 21 4 41 0 21 S+U Gesundbrunnen Bhf ab 0 42 1 02 4 22 4 42 0 22 S Bornholmer Str. -
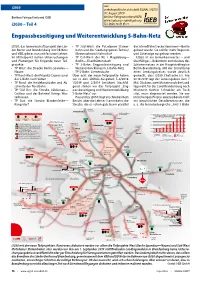
Engpassbeseitigung Und Weiterentwicklung S‑Bahn‑Netz
i2030 aus: verkehrspolitische Zeitschrift SIGNAL 3/2019 (11. August 2019) Berliner Fahrgastverband IGEB Berliner Fahrgastverband IGEB www.igeb.org • [email protected] i2030 – Teil 4 Tel. (030) 78 70 55 11 Berliner Fahrgastverband Engpassbeseitigung und Weiterentwicklung S‑Bahn‑Netz i2030, das Gemeinschaftsprojekt der Län- • TP Süd-West: die Potsdamer Stamm- die Schnellfahrstrecke Hannover—Berlin der Berlin und Brandenburg mit DB Netz bahn und das Siedlungsgebiet Teltow/ gebaut wurde. Sie soll für mehr Regional- und VBB, gibt es nun seit fast zwei Jahren. Kleinmachnow/Stahnsdorf und Güterzüge ausgebaut werden. Im Mittelpunkt stehen Untersuchungen • TP Ost-West: der RE 1 Magdeburg— I2030 ist ein bemerkenswertes – und und Planungen für folgende neun Teil- Berlin—Eisenhüttenstadt überfälliges – Bekenntnis zum Ausbau des projekte: • TP S-Bahn: Engpassbeseitigung und Schienennetzes in der Hauptstadtregion • TP West: die Strecke Berlin-Spandau— Weiterentwicklung im S-Bahn-Netz Berlin-Brandenburg. Mit der Einrichtung Nauen • TP S-Bahn: Siemensbahn eines Lenkungskreises wurde deutlich • TP Nord-West: der Prignitz-Express und Über acht der neun Teilprojekte haben gemacht, dass i2030 Chefsache ist. Am die S-Bahn nach Velten wir in den SIGNAL-Ausgaben 5-6/2018, 30.10.2019 tagt der Lenkungskreis zum 7. • TP Nord: die Heidekrautbahn und Ab- 1/2019 und 2/2019 berichtet. Nachfol- Mal. Ob dann, zwei Monate nach der Land- schnitte der Nordbahn gend stellen wir das Teilprojekt „Eng- tagswahl, für das Land Brandenburg noch • TP Süd-Ost: die Strecke Lübbenau— -

Verkehrliche Voruntersuchung Und Standardisierte Bewertung Für Die Wiederinbetriebnahme Der Potsdamer Stammbahn
Stammbahnsteig auf dem S-Bf Zehlendorf Bf Düppel, Bahnsteigkante Verkehrliche Voruntersuchung und Standardisierte Bewertung für die Wiederinbetriebnahme der Potsdamer Stammbahn Untersuchungsergebnisse Februar 2008 INTRAPLAN CONSULT GMBH • Orleansplatz 5a • 81667 München • Tel. 089 / 45 91 10 Fax 089 / 447 05 93 • e-mail: [email protected] Auftraggeber: Auftragnehmer: Senatsverwaltung für Stadtentwicklung Berlin Intraplan Consult GmbH Am Kölnischen Park 3 Orleansplatz 5a 10179 Berlin 81667 München Ministerium für Infrastruktur und Raumordnung des Landes Brandenburg Henning-von-Tresckow-Straße 2-8 14467 Potsdam Inhaltsverzeichnis 1 Aufgabenstellung und Zielsetzung 1 2 Projektstruktur 2 3 Grundlagen 5 3.1 Beschreibung des Investitionsvorhabens 5 3.2 Abgrenzung und Strukturierung des Untersuchungsraumes 10 3.3 Abbildung des Istzustandes 12 3.3.1 MIV-/ÖPNV-Angebot Istzustand 12 3.3.2 MIV-/ÖPNV-Nachfrage Istzustand 15 3.3.3 Umlegungsergebnisse ÖPNV Istzustand 19 4 Mengengerüst Ohnefall 21 4.1 Absehbare Strukturentwicklung 21 4.2 MIV-Maßnahmen 22 4.3 ÖPNV-Angebot Ohnefall 26 4.3.1 Regionalverkehrskonzept im Ohnefall 26 4.3.2 Betriebskonzept S-Bahn im Ohnefall 30 4.3.3 Bedienungskonzepte für die Betriebszweige U-Bahn und Straßen- bahn im Ohnefall 35 4.4 MIV-/ÖPNV-Nachfrage Ohnefall 35 4.4.1 Verflechtungsmatrix MIV/ÖPNV für den normalwerktäglichen Regel- verkehr 35 4.4.2 Verflechtungsmatrizen Ohnefall für den flughafenbezogenen Verkehr 36 4.4.3 Nahverkehrsrelevante Teilwege von SPFV-Kunden 38 4.5 Umlegung ÖPNV und Dimensionierungsnachweise 40 -

Studie Zu ÖPNV Engpässen Und Lösungen
Studie zu aktuellen und prognosti- Auftraggeber: schen Engpässen und Lösungen im IHK Industrie- und Handelskammer Berliner ÖPNV Berlin Fasanenstraße 85 10623 Berlin https://www.ihk-berlin.de/ Bericht, April 2018 Auftragnehmer: VCDB VerkehrsConsult Dresden-Berlin GmbH Uhlandstraße 97 10715 Berlin Könneritzstraße 31 01067 Dresden Tel.: 0351 / 4 82 31 00 Fax: 0351 / 4 82 31 09 E-Mail: [email protected] Web: http://www.vcdb.de Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR) Institut für Verkehrsforschung Rutherfordstraße 2 12489 Berlin Tel.: 030 67055-681 Fax: 030 67055-283 Web: www.DLR.de/vf Ansprechpartner: Lutz Richter E-Mail: [email protected] Dr. Matthias Heinrichs E-Mail: [email protected] Studie zu aktuellen und prognostischen Engpässen und Lösungen im Berliner ÖPNV Inhaltsverzeichnis Inhaltsverzeichnis 1 Ausgangslage und Zielstellung ................................... 7 2 ÖPNV-Analyse ............................................................. 8 2.1 Aufbau des Verkehrsmodells ................................................ 8 2.2 Fahrzeuganalyse ................................................................... 9 2.3 Prognosenullfall 2030 .......................................................... 11 3 Prognose der Nachfrageentwicklung absehbarer Engpässe im Berliner ÖPNV ..................................... 13 3.1 Methodik .............................................................................. 13 3.2 Verkehrsumlegung 2030...................................................... 17 4 Empfehlungen zur Lösung der -

Transit Systems in the Us and Germany
TRANSIT SYSTEMS IN THE US AND GERMANY - A COMPARISON A Thesis Presented to The Academic Faculty by Johannes von dem Knesebeck In Partial Fulfillment of the Requirements for the Degree Master of Science in Civil Engineering in the School of Civil and Environmental Engineering Georgia Institute of Technology August 2011 TRANSIT SYSTEMS IN THE US AND GERMANY - A COMPARISON Approved by: Dr. Michael D. Meyer, Advisor School of Civil and Environmental Engineering Georgia Institute of Technology Dr. Adjo Akpene Amekudzi School of Civil and Environmental Engineering Georgia Institute of Technology Dr. Frank Southworth School of Civil and Environmental Engineering Georgia Institute of Technology Date Approved: July 5, 2011 ACKNOWLEDGEMENTS I wish to thank my advisor Dr. Michael D. Meyer for his help and constant support during the writing of this thesis. I also wish to thank the members of my thesis committee Dr. Adjo A. Amekudzi and Dr. Frank Southworth for their helpful comments and input. Furthermore, I would like to thank all the respective transit agencies in Germany and the US for making data available to me and helping me with hints and comments about my research. iii TABLE OF CONTENTS Page ACKNOWLEDGEMENTS iii LIST OF TABLES vii LIST OF FIGURES viii LIST OF SYMBOLS AND ABBREVIATIONS ix SUMMARY xi CHAPTER 1 Introduction and Methodology 12 1.1 Introduction 12 1.2 Methodology 13 1.2.1 Choice of Cities 13 1.2.2 Choice of Transit Systems 14 1.2.3 Collected Data 16 1.2.4 Definition of Rail System-Terms 19 1.2.5 Data Interpretation 21 1.3 Organization -

Berlin for Families
visitBerlin.com 25 00 (0)30-25 +49 Key Friedrichshain-Kreuzberg Events Hotels, Tickets, Info Info Tickets, Hotels, 06 Playground Mitte 021 German Museum of Technology and Science Center Spectrum 8–11 March 2018 Late August 2018 October 2018 07 Disney On Ice Long Night of Museums Long Family Night Bonbonmacherei Sweetshop Family audio guide at the Oberbaumbrücke bridge Indoor playground 022 08 8–11 March 2018 Disney On Enjoy an exciting An open-door event until Grips Theater Schwarzlicht-Minigolf-Kreuzberg 023 09 Ice In Worlds of Enchant- programme of events midnight for families with U U-Bahn (subway) Natural History Museum Berlin Jewish Museum Berlin ment, the latest hit show, and explore the stunning children under 14 at venues 024 010 station enjoy the dazzling world exhibitions in Berlin’s from studios to laboratories, Fischerinsel Tree House Computer Games Museum Tip S S-Bahn station 025 of Disney characters, stunts museums. lange-nacht- yurt tents and more. LEGOLANDDiscoveryCentre Berlin Tip (city railway) and magic. der-museen.de familiennacht.de B Bus stop velodrom.de Reinickendorf 22 September 2018 Nov 2017–Feb 2018 Tram stop 036 T Lübars family farm and leisure park 19 May 2018 Berlin Torchlight Concert Märchenberg 037 Children’s Carnival of A magical open-air The Hexenkessel Hofthe- Borough border Heiligensee village A Playground Adolfstraße 038 ages 16 and under Cultures family show by Berlin ater presents the Grimm Fire Service Museum A Dragon Playground, ages 12 and under Carnival procession follo- band Rumpelstil with the brothers’ fairy tales in their 039 Adolfstraße 25, 13347 Berlin Photo: Martin Peterdamm Photo: Berlin Tourist Info Schreinerstraße, 10247 Berlin Greenwich Promenade S41, 42+U6 Wedding wed by a children’s party in audience’s sea of torches glass venue in the Pfeffer- Berlin hotels are family friendly Centers 040 U5 Samariterstraße Görlitzer Park. -

S-Bahn Linie S25 Fahrpläne & Netzkarten
S-Bahn Linie S25 Fahrpläne & Netzkarten Teltow Stadt ◄ ► Hennigsdorf Bhf Im Website-Modus Anzeigen Die S-Bahn Linie S25 (Teltow Stadt ◄ ► Hennigsdorf Bhf) hat 14 Routen (1) Gesundbrunnen Bhf: 00:05 - 23:45 (2) Heiligensee: 00:38 (3) Hennigsdorf Bhf: 00:05 - 23:45 (4) Lichterfelde Süd: 00:28 (5) Potsdamer Platz Bhf: 04:08 (6) Potsdamer Platz Bhf: 00:45 (7) Tegel: 00:25 (8) Teltow Stadt: 00:08 - 23:48 (9) Waidmannslust: 20:25 - 21:05 Verwende Moovit, um die nächste Station der S-Bahn Linie S25 zu ƒnden und, um zu erfahren wann die nächste S-Bahn Linie S25 kommt. Richtung: Gesundbrunnen Bhf S-Bahn Linie S25 Fahrpläne 17 Haltestellen Abfahrzeiten in Richtung Gesundbrunnen Bhf LINIENPLAN ANZEIGEN Montag 00:05 - 00:45 Dienstag Kein Betrieb Teltow Stadt Wilhelm-Leuschner-Straße 4, Berlin Mittwoch Kein Betrieb Lichterfelde Süd Donnerstag Kein Betrieb Westfalenring 1, Berlin Freitag 21:25 - 23:45 Osdorfer Str. Samstag 00:05 - 23:45 Osdorfer Straße 124A, Berlin Sonntag 00:05 - 23:45 Lichterfelde Ost Bhf S Lankwitz S Lankwitz, Berlin S-Bahn Linie S25 Info Südende Richtung: Gesundbrunnen Bhf Stationen: 17 Priesterweg Fahrtdauer: 37 Min Linien Informationen: Teltow Stadt, Lichterfelde Südkreuz Bhf Süd, Osdorfer Str., Lichterfelde Ost Bhf, S Lankwitz, General-Pape-Straße 1, Berlin Südende, Priesterweg, Südkreuz Bhf, Yorckstraße, Anhalter Bahnhof, Potsdamer Platz Bhf, Yorckstraße Brandenburger Tor, Friedrichstr. Bhf, Oranienburger Yorckstraße 56B, Berlin Str., Nordbahnhof, Humboldthain, Gesundbrunnen Bhf Anhalter Bahnhof Askanischer Platz 5, Berlin -

Schriftliche Anfrage
Drucksache 18 / 15 178 Schriftliche Anfrage 18. Wahlperiode Schriftliche Anfrage des Abgeordneten Dirk Stettner (CDU) vom 28. Mai 2018 (Eingang beim Abgeordnetenhaus am 29. Mai 2018) zum Thema: Entsorgungssicherheit für tausende Haushalte im Nord-Osten Berlins und Antwort vom 04. Juni 2018 (Eingang beim Abgeordnetenhaus am 13. Juni 2018) Die Drucksachen des Abgeordnetenhauses sind bei der Kulturbuch-Verlag GmbH zu beziehen. Hausanschrift: Sprosserweg 3, 12351 Berlin-Buckow · Postanschrift: Postfach 47 04 49, 12313 Berlin, Telefon: 6 61 84 84; Telefax: 6 61 78 28. Senatsverwaltung für Umwelt, Verkehr und Klimaschutz Herrn Abgeordneten Dirk Stettner (CDU) über den Präsidenten des Abgeordnetenhauses von Berlin über Senatskanzlei - G Sen - A n t w o r t auf die Schriftliche Anfrage Nr. 18/15178 vom 28.05.2018 über Entsorgungssicherheit für tausende Haushalte im Nord-Osten Berlins Im Namen des Senats von Berlin beantworte ich Ihre Schriftliche Anfrage wie folgt: Die Schriftliche Anfrage betrifft Sachverhalte, die der Senat nicht aus eigener Zuständigkeit und Kenntnis beantworten kann. Er ist gleichwohl bemüht, Ihnen eine Antwort auf Ihre Anfrage zukommen zu lassen und hat daher die Berliner Wasserbetriebe (BWB) um Stellungnahme gebeten, die von dort in eigener Verantwortung erstellt und dem Senat übermittelt wurde. Die Berliner Wasserbetriebe erschließen von 2018 bis 2030 fünf schnell wachsende Einfamilienhausgebiete in Pankow und Marzahn mit Schmutzwasserkanälen und wollen so Entsorgungssicherheit für das Abwasser von mehr als 16.000 Berlinerinnen und Berlinern schaffen. Ein entsprechendes Investitionsprogramm über fast 60 Millionen Euro hat der Aufsichtsrat des Unternehmens nach Eigendarstellung jüngst beschlossen. Konkret gehe es um die Altsiedlungsgebiete Biesenhorst, Buchholz Nord I, Schönholz, Karow Süd und Karow Ost (Altsiedlung). -
Berlin for Families
visitBerlin.com 25 00 (0)30-25 +49 Key Events Friedrichshain-Kreuzberg Hotels, Tickets, Info Info Tickets, Hotels, 6 Mitte 0 7–10 March 2019 31 August 2019 October 2019 Playground Family audio guide at the Oberbaumbrücke bridge 021 07 Disney On Ice Long Night of Museums Long Night of Families Bonbonmacherei Sweetshop Schwarzlicht-Minigolf Kreuzberg Indoor playground 022 08 Berlin’s Velodrom hosts Enjoy an exciting An open-door event until Grips Theater Park am Gleisdreieck Disney On Ice’s new programme of events midnight for families with 023 09 U U-Bahn (subway) Museum of Natural History Jewish Museum Berlin hit show 100 Years of and explore the stunning children under 14 at station 024 010 Magic with a dazzling exhibitions in Berlin’s venues from studios to AquaDom & SEA LIFE Berlin S S-Bahn station 025 German Museum of cast of Disney characters museums. laboratories, yurt tents (city railway) Foxtrail – Follow the trail Tip Technology and Spectrum Tip and magical moments. lange-nacht-der-museen.de and much more. B Bus stop velodrom.de familiennacht.de Reinickendorf September 2019 Tram stop 036 8 June 2019 Berlin Torchlight Concert Nov. 2019 to Feb. 2020 T Lübars family farm and leisure park 037 Children’s Carnival A magical open-air Märchenberg Photo: Martin Peterdamm Photo: Borough border Heiligensee village A Playground Adolfstraße of Cultures family show by Berlin The Hexenkessel 038 ages 16 and under Fire Service Museum A Dragon Playground, ages 12 and under Carnival procession band Rumpelstil with the Hoftheater presents the Berlin Tourist Info 039 Adolfstraße 25, 13347 Berlin Schreinerstraße 48/49, 10247 Berlin followed by children’s audience’s sea of torches Grimm brothers’ fairy tales Greenwich Promenade S41, 42+U6 Wedding Berlin’s Family Friendly Hotels Centre 040 U5 Samariterstraße party in Görlitzer Park.