Expert-Driven Genetic Algorithms for Simulating Evaluation Functions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chess Tests: Basic Suite, Positions 16-20
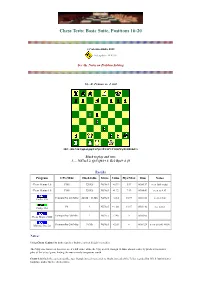
Chess Tests: Basic Suite, Positions 16-20 (c) Valentin Albillo, 2020 Last update: 14/01/98 See the Notes on Problem Solving 16.- Z. Franco vs. J. Gil FEN: rbb1N1k1/pp1n1ppp/8/2Pp4/3P4/4P3/P1Q2PPq/R1BR1K2/ b Black to play and win: 1. ... Nd7xc5 2. Qc5 Qh1+ 3. Ke2 Bg4+ 4. f3 Results Program CPU/Mhz Hash table Move Value Plys/Max Time Notes Chess Genius 1.0 P100 320 Kb Nd7xc5 +0.39 5/17 00:00:17 sees little value Chess Genius 1.0 P100 320 Kb Nd7xc5 +1.72 7/19 00:04:49 sees to 4. f3 Pentium Pro 200 MHz 24 Mb + 16 Mb Nd7xc5 +2.14 10/19 00:01:20 seen at 14s Crafty 12.6 P6 ? Nd7xc5 +1.181 11/17 00:01:46 see notes Crafty 13.3 Pentium Pro 200 Mhz ? Nd7xc5 +2.46 9 00:03:05 Chess Master 5500 Pentium Pro 200 Mhz 10 Mb Nd7xc5 +2.65 6 00:01:24 seen at 0:00, +0.00 MChess Pro 5.0 Notes: Using Chess Genius 1.0, both searches find the correct Knight's sacrifice. The 5-ply one, however, does not see it's full value, while the 7-ply search, though 16 times slower, correctly predicts the next 6 plies of the actual game, finding the move nearly two pawns worth. Crafty 12.6 finds the correct sacrifice too, though it needs to search to 10 ply, instead of the 7 plies required by CG1.0, but its better hardware makes for the shortest time. -
Draft – Not for Circulation
A Gross Miscarriage of Justice in Computer Chess by Dr. Søren Riis Introduction In June 2011 it was widely reported in the global media that the International Computer Games Association (ICGA) had found chess programmer International Master Vasik Rajlich in breach of the ICGA‟s annual World Computer Chess Championship (WCCC) tournament rule related to program originality. In the ICGA‟s accompanying report it was asserted that Rajlich‟s chess program Rybka contained “plagiarized” code from Fruit, a program authored by Fabien Letouzey of France. Some of the headlines reporting the charges and ruling in the media were “Computer Chess Champion Caught Injecting Performance-Enhancing Code”, “Computer Chess Reels from Biggest Sporting Scandal Since Ben Johnson” and “Czech Mate, Mr. Cheat”, accompanied by a photo of Rajlich and his wife at their wedding. In response, Rajlich claimed complete innocence and made it clear that he found the ICGA‟s investigatory process and conclusions to be biased and unprofessional, and the charges baseless and unworthy. He refused to be drawn into a protracted dispute with his accusers or mount a comprehensive defense. This article re-examines the case. With the support of an extensive technical report by Ed Schröder, author of chess program Rebel (World Computer Chess champion in 1991 and 1992) as well as support in the form of unpublished notes from chess programmer Sven Schüle, I argue that the ICGA‟s findings were misleading and its ruling lacked any sense of proportion. The purpose of this paper is to defend the reputation of Vasik Rajlich, whose innovative and influential program Rybka was in the vanguard of a mid-decade paradigm change within the computer chess community. -
The SSDF Chess Engine Rating List, 2019-02
The SSDF Chess Engine Rating List, 2019-02 Article Accepted Version The SSDF report Sandin, L. and Haworth, G. (2019) The SSDF Chess Engine Rating List, 2019-02. ICGA Journal, 41 (2). 113. ISSN 1389- 6911 doi: https://doi.org/10.3233/ICG-190107 Available at http://centaur.reading.ac.uk/82675/ It is advisable to refer to the publisher’s version if you intend to cite from the work. See Guidance on citing . Published version at: https://doi.org/10.3233/ICG-190085 To link to this article DOI: http://dx.doi.org/10.3233/ICG-190107 Publisher: The International Computer Games Association All outputs in CentAUR are protected by Intellectual Property Rights law, including copyright law. Copyright and IPR is retained by the creators or other copyright holders. Terms and conditions for use of this material are defined in the End User Agreement . www.reading.ac.uk/centaur CentAUR Central Archive at the University of Reading Reading’s research outputs online THE SSDF RATING LIST 2019-02-28 148673 games played by 377 computers Rating + - Games Won Oppo ------ --- --- ----- --- ---- 1 Stockfish 9 x64 1800X 3.6 GHz 3494 32 -30 642 74% 3308 2 Komodo 12.3 x64 1800X 3.6 GHz 3456 30 -28 640 68% 3321 3 Stockfish 9 x64 Q6600 2.4 GHz 3446 50 -48 200 57% 3396 4 Stockfish 8 x64 1800X 3.6 GHz 3432 26 -24 1059 77% 3217 5 Stockfish 8 x64 Q6600 2.4 GHz 3418 38 -35 440 72% 3251 6 Komodo 11.01 x64 1800X 3.6 GHz 3397 23 -22 1134 72% 3229 7 Deep Shredder 13 x64 1800X 3.6 GHz 3360 25 -24 830 66% 3246 8 Booot 6.3.1 x64 1800X 3.6 GHz 3352 29 -29 560 54% 3319 9 Komodo 9.1 -

SHOWCASE BC 831 Funding Offers for BC Artists
SHOWCASE BC 831 Funding Offers for BC Artists Funding offers were sent to the following artists on April 17 + April 21, 2020. Artists have until May 15, 2020, to accept the grant. A Million Dollars in Pennies ArkenFire Booty EP Abraham Arkora BOSLEN ACTORS Art d’Ecco Bratboy Adam Bailie Art Napoleon Bre McDaniel Adam Charles Wilson Asha Diaz Brent Joseph Adam Rosenthal Asheida Brevner Adam Winn Ashleigh Adele Ball Bridal Party Adera A-SLAM Bring The Noise Adewolf Astrocolor Britt A.M. Adrian Chalifour Autogramm Brooke Maxwell A-DUB AutoHeart Bruce Coughlan Aggression Aza Nabuko Buckman Coe Aidan Knight Babe Corner Bukola Balogan Air Stranger Balkan Shmalkan Bunnie Alex Cuba bbno$ Bushido World Music Alex Little and The Suspicious Beamer Wigley C.R. Avery Minds Bear Mountain Cabins In The Clouds Alex Maher Bedouin Soundclash Caitlin Goulet Alexander Boynton Jr. Ben Cottrill Cam Blake Alexandria Maillot Ben Dunnill Cam Penner Alien Boys Ben Klick Camaro 67 Alisa Balogh Ben Rogers Capri Everitt Alpas Collective Beth Marie Anderson Caracas the Band Alpha Yaya Diallo Betty and The Kid Cari Burdett Amber Mae Biawanna Carlos Joe Costa Andrea Superstein Big John Bates Noirchestra Carmanah Andrew Judah Big Little Lions Carsen Gray Andrew Phelan Black Mountain Whiskey Carson Hoy Angela Harris Rebellion Caryn Fader Angie Faith Black Wizard Cassandra Maze Anklegod Blackberry Wood Cassidy Waring Annette Ducharme Blessed Cayla Brooke Antoinette Blonde Diamond Chamelion Antonio Larosa Blue J Ché Aimee Dorval Anu Davaasuren Blue Moon Marquee Checkmate -

2000/4 Layout
Virginia Chess Newsletter 2000- #4 1 GEORGE WASHINGTON OPEN by Mike Atkins N A COLD WINTER'S NIGHT on Dec 14, 1799, OGeorge Washington passed away on the grounds of his estate in Mt Vernon. He had gone for a tour of his property on a rainy day, fell ill, and was slowly killed by his physicians. Today the Best Western Mt Vernon hotel, site of VCF tournaments since 1996, stands only a few miles away. One wonders how George would have reacted to his name being used for a chess tournament, the George Washington Open. Eighty-seven players competed, a new record for Mt Vernon events. Designed as a one year replacement for the Fredericksburg Open, the GWO was a resounding success in its initial and perhaps not last appearance. Sitting atop the field by a good 170 points were IM Larry Kaufman (2456) and FM Emory Tate (2443). Kudos to the validity of 1 the rating system, as the final round saw these two playing on board 1, the only 4 ⁄2s. Tate is famous for his tactics and EMORY TATE -LARRY KAUFMAN (13...gxf3!?) 14 Nh5 gxf3 15 Kaufman is super solid and FRENCH gxf3 Nf8 16 Rg1+ Ng6 17 Rg4 rarely loses except to brilliancies. 1 e4 e6 2 Nf3 d5 3 Nc3 Nf6 Bd7 18 Kf1 Nd8 19 Qd2 Bb5 Inevitably one recalls their 4 e5 Nfd7 5 Ne2 c5 6 d4 20 Re1 f5 21 exf6 Bb4 22 f7+ meeting in the last round at the Nc6 7 c3 Be7 8 Nf4 cxd4 9 Kxf7 23 Rf4+ Nxf4 24 Qxf4+ 1999 Virginia Open, there also cxd4 Qb6 10 Be2 g5 11 Ke7 25 Qf6+ Kd7 26 Qg7+ on on the top board. -

SECRETS of POSITIONAL SACRIFICE Authors GM Nikola Nestorović, IM Dejan Nestorović
IM Dejan Nestorović GM Nikola Nestorović SECRETS OF POSITIONAL SACRIFICE Authors GM Nikola Nestorović, IM Dejan Nestorović Editorial board Vitomir Božić, Irena Nestorović, Miloš Perunović, Branko Tadić, Igor Žveglić Cover design Aleksa Mitrović Translator Ivan Marinković Proofreading Vitomir Božić Contributors Katarina Nestorović, Lazar Nestorović Editor-in-chief Branko Tadić General Manager Vitomir Božić President Aleksandar Matanović © Copyright 2021 Šahovski informator All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means: electronic, magnetic tape, mechanical, photocopying, recording or otherwise, without prior permission in writing from the publisher. No part of the Chess Informant system (classifications of openings, endings and combinations, code system, etc.) may be used in other publications without prior permission in writing from the publisher. ISBN 978-86-7297-119-4 Izdavač Šahovski informator 11001 Beograd, Francuska 31, Srbija Phone: (381 11) 2630-109 E-mail: [email protected] Internet: https://www.sahovski.com A Word from the Author “Secrets of Positional Sacrifice” is the second book, created within the premises of the Nestor- ović family chess workshop. I would like to mention that the whole family contributed to this book. We are also extremely thankful to our friends, who, thanks to their previous experience, have introduced us to the process of creating chess books, with their invaluable advice and ideas. Considering the abundance of material regarding this topic that was gathered, we decided to make this book only the first, lower level of the “Positional sacrifice” edition. My father and I worked hard to make sure that the new book will be as interesting as the first one, but also more adapted to the wider audience. -

A Book About Razuvaev.Indb
Compiled by Boris Postovsky Devoted to Chess The Creative Heritage of Yuri Razuvaev New In Chess 2019 Contents Preface – From the compiler . 7 Foreword – Memories of a chess academic . 9 ‘Memories’ authors in alphabetical order . 16 Chapter 1 – Memories of Razuvaev’s contemporaries – I . 17 Garry Kasparov . 17 Anatoly Karpov . 19 Boris Spassky . 20 Veselin Topalov . .22 Viswanathan Anand . 23 Magnus Carlsen . 23 Boris Postovsky . 23 Chapter 2 – Selected games . 43 1962-1973 – the early years . 43 1975-1978 – grandmaster . 73 1979-1982 – international successes . 102 1983-1986 – expert in many areas . 138 1987-1995 – always easy and clean . 168 Chapter 3 – Memories of Razuvaev’s contemporaries – II . 191 Evgeny Tomashevsky . 191 Boris Gulko . 199 Boris Gelfand . 201 Lyudmila Belavenets . 202 Vladimir Tukmakov . .202 Irina Levitina . 204 Grigory Kaidanov . 206 Michal Krasenkow . 207 Evgeny Bareev . 208 Joel Lautier . 209 Michele Godena . 213 Alexandra Kosteniuk . 215 5 Devoted to Chess Chapter 4 – Articles and interviews (by and with Yuri Razuvaev) . 217 Confessions of a grandmaster . 217 My Gambit . 218 The Four Knights Opening . 234 The gambit syndrome . 252 A game of ghosts . 258 You are right, Monsieur De la Bourdonnais!! . 267 In the best traditions of the Soviet school of chess . 276 A lesson with Yuri Razuvaev . 283 A sharp turn . 293 Extreme . 299 The Botvinnik System . 311 ‘How to develop your intellect’ . 315 ‘I am with Tal, we all developed from Botvinnik . ’. 325 Chapter 5 – Memories of Razuvaev’s contemporaries – III . .331 Igor Zaitsev . 331 Alexander Nikitin . 332 Albert Kapengut . 332 Alexander Shashin . 335 Boris Zlotnik . 337 Lev Khariton . 337 Sergey Yanovsky . -

Www . Polonia Chess.Pl
Amplico_eng 12/11/07 8:39 Page 1 26th MEMORIAL of STANIS¸AW GAWLIKOWSKI UNDER THE AUSPICES OF THE PRESIDENT OF THE CITY OF WARSAW HANNA GRONKIEWICZ-WALTZ AND THE MARSHAL OF THE MAZOWIECKIE VOIVODESHIP ADAM STRUZIK chess.pl polonia VII AMPLICO AIG LIFE INTERNATIONAL CHESS TOURNEMENT EUROPEAN RAPID CHESS CHAMPIONSHIP www. INTERNATIONAL WARSAW BLITZ CHESS CHAMPIONSHIP WARSAW • 14th–16th December 2007 Amplico_eng 12/11/07 8:39 Page 2 7 th AMPLICO AIG LIFE INTERNATIONAL CHESS TOURNAMENT WARSAW EUROPEAN RAPID CHESS CHAMPIONSHIP 15th-16th DEC 2007 Chess Club Polonia Warsaw, MKS Polonia Warsaw and the Warsaw Foundation for Chess Development are one of the most significant organizers of chess life in Poland and in Europe. The most important achievements of “Polonia Chess”: • Successes of the grandmasters representing Polonia: • 5 times finishing second (1997, 1999, 2001, 2003 and 2005) and once third (2002) in the European Chess Club Cup; • 8 times in a row (1999-2006) team championship of Poland; • our players have won 24 medals in Polish Individual Championships, including 7 gold, 11 silver and 4 bronze medals; • GM Bartlomiej Macieja became European Champion in 2002 (the greatest individual success in the history of Polish chess after the Second World War); • WGM Beata Kadziolka won the bronze medal at the World Championship 2005; • the players of Polonia have had qualified for the World Championships and World Cups: Micha∏ Krasenkow and Bart∏omiej Macieja (six times), Monika Soçko (three times), Robert Kempiƒski and Mateusz Bartel (twice), -

Chess Assistant 15 Is a Unique Tool for Managing Chess Games and Databases, Playing Chess Online, Analyzing Games, Or Playing Chess Against the Computer
Chess Assistant 15 is a unique tool for managing chess games and databases, playing chess online, analyzing games, or playing chess against the computer. The package includes the best chess engine – Houdini 4 UCI, Chess Opening Encyclopedia, a powerful search system, a unique Tree mode, databases of 6.2 million games in total (as of November 1, 2014), 1-year Premium Game Service (3000 new games each week by Internet), twelve months of free access (1-year membership) at ChessOK Playing Zone. Houdini 4 is the World’s strongest chess engine, capable of supporting up to 32 cores and 32 GB of hash. You can connect Houdini 4 UCI engine to ChessOK Aquarium, Fritz and ChessBase. Houdini 4 – The World Rating Lists Leader Chess Assistant 15 comes with the Houdini 4 chess engine. Houdini 4 leads most independent computer chess rating lists. No serious chess player can be without Houdini 4! Opening Studies – Stay Organized with Opening Tables Chess Opening Encyclopedia contains rich theoretical material on all openings. It contains over 8.000 annotations from GM Kalinin and 40 million evaluations by the strongest engines. The detailed key system for all openings can be edited to suit your needs. Opening Tables is a revolutionary way of creating, maintaining and studying your opening repertoire. Base your studies on the Opening Encyclopedia, customize it with your own moves and evaluations, enhance your favorite variations or create your own private opening repertoire. Working on your opening repertoire finally becomes the creative and enjoyable task it should be! Opening Test Mode allows you to test your knowledge and skills in openings. -

A GUIDE to SCHOLASTIC CHESS (11Th Edition Revised June 26, 2021)
A GUIDE TO SCHOLASTIC CHESS (11th Edition Revised June 26, 2021) PREFACE Dear Administrator, Teacher, or Coach This guide was created to help teachers and scholastic chess organizers who wish to begin, improve, or strengthen their school chess program. It covers how to organize a school chess club, run tournaments, keep interest high, and generate administrative, school district, parental and public support. I would like to thank the United States Chess Federation Club Development Committee, especially former Chairman Randy Siebert, for allowing us to use the framework of The Guide to a Successful Chess Club (1985) as a basis for this book. In addition, I want to thank FIDE Master Tom Brownscombe (NV), National Tournament Director, and the United States Chess Federation (US Chess) for their continuing help in the preparation of this publication. Scholastic chess, under the guidance of US Chess, has greatly expanded and made it possible for the wide distribution of this Guide. I look forward to working with them on many projects in the future. The following scholastic organizers reviewed various editions of this work and made many suggestions, which have been included. Thanks go to Jay Blem (CA), Leo Cotter (CA), Stephan Dann (MA), Bob Fischer (IN), Doug Meux (NM), Andy Nowak (NM), Andrew Smith (CA), Brian Bugbee (NY), WIM Beatriz Marinello (NY), WIM Alexey Root (TX), Ernest Schlich (VA), Tim Just (IL), Karis Bellisario and many others too numerous to mention. Finally, a special thanks to my wife, Susan, who has been patient and understanding. Dewain R. Barber Technical Editor: Tim Just (Author of My Opponent is Eating a Doughnut and Just Law; Editor 5th, 6th and 7th editions of the Official Rules of Chess). -

Chess & Bridge
2013 Catalogue Chess & Bridge Plus Backgammon Poker and other traditional games cbcat2013_p02_contents_Layout 1 02/11/2012 09:18 Page 1 Contents CONTENTS WAYS TO ORDER Chess Section Call our Order Line 3-9 Wooden Chess Sets 10-11 Wooden Chess Boards 020 7288 1305 or 12 Chess Boxes 13 Chess Tables 020 7486 7015 14-17 Wooden Chess Combinations 9.30am-6pm Monday - Saturday 18 Miscellaneous Sets 11am - 5pm Sundays 19 Decorative & Themed Chess Sets 20-21 Travel Sets 22 Giant Chess Sets Shop online 23-25 Chess Clocks www.chess.co.uk/shop 26-28 Plastic Chess Sets & Combinations or 29 Demonstration Chess Boards www.bridgeshop.com 30-31 Stationery, Medals & Trophies 32 Chess T-Shirts 33-37 Chess DVDs Post the order form to: 38-39 Chess Software: Playing Programs 40 Chess Software: ChessBase 12` Chess & Bridge 41-43 Chess Software: Fritz Media System 44 Baker Street 44-45 Chess Software: from Chess Assistant 46 Recommendations for Junior Players London, W1U 7RT 47 Subscribe to Chess Magazine 48-49 Order Form 50 Subscribe to BRIDGE Magazine REASONS TO SHOP ONLINE 51 Recommendations for Junior Players - New items added each and every week 52-55 Chess Computers - Many more items online 56-60 Bargain Chess Books 61-66 Chess Books - Larger and alternative images for most items - Full descriptions of each item Bridge Section - Exclusive website offers on selected items 68 Bridge Tables & Cloths 69-70 Bridge Equipment - Pay securely via Debit/Credit Card or PayPal 71-72 Bridge Software: Playing Programs 73 Bridge Software: Instructional 74-77 Decorative Playing Cards 78-83 Gift Ideas & Bridge DVDs 84-86 Bargain Bridge Books 87 Recommended Bridge Books 88-89 Bridge Books by Subject 90-91 Backgammon 92 Go 93 Poker 94 Other Games 95 Website Information 96 Retail shop information page 2 TO ORDER 020 7288 1305 or 020 7486 7015 cbcat2013_p03to5_woodsets_Layout 1 02/11/2012 09:53 Page 1 Wooden Chess Sets A LITTLE MORE INFORMATION ABOUT OUR CHESS SETS.. -

Extended Null-Move Reductions
Extended Null-Move Reductions Omid David-Tabibi1 and Nathan S. Netanyahu1,2 1 Department of Computer Science, Bar-Ilan University, Ramat-Gan 52900, Israel [email protected], [email protected] 2 Center for Automation Research, University of Maryland, College Park, MD 20742, USA [email protected] Abstract. In this paper we review the conventional versions of null- move pruning, and present our enhancements which allow for a deeper search with greater accuracy. While the conventional versions of null- move pruning use reduction values of R ≤ 3, we use an aggressive re- duction value of R = 4 within a verified adaptive configuration which maximizes the benefit from the more aggressive pruning, while limiting its tactical liabilities. Our experimental results using our grandmaster- level chess program, Falcon, show that our null-move reductions (NMR) outperform the conventional methods, with the tactical benefits of the deeper search dominating the deficiencies. Moreover, unlike standard null-move pruning, which fails badly in zugzwang positions, NMR is impervious to zugzwangs. Finally, the implementation of NMR in any program already using null-move pruning requires a modification of only a few lines of code. 1 Introduction Chess programs trying to search the same way humans think by generating “plausible” moves dominated until the mid-1970s. By using extensive chess knowledge at each node, these programs selected a few moves which they consid- ered plausible, and thus pruned large parts of the search tree. However, plausible- move generating programs had serious tactical shortcomings, and as soon as brute-force search programs such as Tech [17] and Chess 4.x [29] managed to reach depths of 5 plies and more, plausible-move generating programs fre- quently lost to brute-force searchers due to their tactical weaknesses.