Rapid ASIC Design for Digital Signal Processors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Synthesis and Verification of Digital Circuits Using Functional Simulation and Boolean Satisfiability
Synthesis and Verification of Digital Circuits using Functional Simulation and Boolean Satisfiability by Stephen M. Plaza A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Computer Science and Engineering) in The University of Michigan 2008 Doctoral Committee: Associate Professor Igor L. Markov, Co-Chair Assistant Professor Valeria M. Bertacco, Co-Chair Professor John P. Hayes Professor Karem A. Sakallah Associate Professor Dennis M. Sylvester Stephen M. Plaza 2008 c All Rights Reserved To my family, friends, and country ii ACKNOWLEDGEMENTS I would like to thank my advisers, Professor Igor Markov and Professor Valeria Bertacco, for inspiring me to consider various fields of research and providing feedback on my projects and papers. I also want to thank my defense committee for their comments and in- sights: Professor John Hayes, Professor Karem Sakallah, and Professor Dennis Sylvester. I would like to thank Professor David Kieras for enhancing my knowledge and apprecia- tion for computer programming and providing invaluable advice. Over the years, I have been fortunate to know and work with several wonderful stu- dents. I have collaborated extensively with Kai-hui Chang and Smita Krishnaswamy and have enjoyed numerous research discussions with them and have benefited from their in- sights. I would like to thank Ian Kountanis and Zaher Andraus for our many fun discus- sions on parallel SAT. I also appreciate the time spent collaborating with Kypros Constan- tinides and Jason Blome. Although I have not formally collaborated with Ilya Wagner, I have enjoyed numerous discussions with him during my doctoral studies. I also thank my office mates Jarrod Roy, Jin Hu, and Hector Garcia. -
Irun User Guide
irun User Guide Product Version 9.2 July 2010 © 1995-2010 Cadence Design Systems, Inc. All rights reserved. Portions © Free Software Foundation, Regents of the University of California, Sun Microsystems, Inc., Scriptics Corporation. Used by permission. Printed in the United States of America. Cadence Design Systems, Inc. (Cadence), 2655 Seely Ave., San Jose, CA 95134, USA. Product NC-SIM contains technology licensed from, and copyrighted by: Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA, and is © 1989, 1991. All rights reserved. Regents of the University of California, Sun Microsystems, Inc., Scriptics Corporation, and other parties and is © 1989-1994 Regents of the University of California, 1984, the Australian National University, 1990-1999 Scriptics Corporation, and other parties. All rights reserved. Open SystemC, Open SystemC Initiative, OSCI, SystemC, and SystemC Initiative are trademarks or registered trademarks of Open SystemC Initiative, Inc. in the United States and other countries and are used with permission. SystemC/HDL mixed-language simulation patent 7424703 was issued on 9/9/2008 Trademarks: Trademarks and service marks of Cadence Design Systems, Inc. contained in this document are attributed to Cadence with the appropriate symbol. For queries regarding Cadence’s trademarks, contact the corporate legal department at the address shown above or call 800.862.4522. All other trademarks are the property of their respective holders. Restricted Permission: This publication is protected by copyright law and international treaties and contains trade secrets and proprietary information owned by Cadence. Unauthorized reproduction or distribution of this publication, or any portion of it, may result in civil and criminal penalties. -
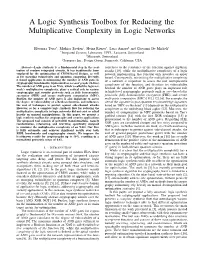
A Logic Synthesis Toolbox for Reducing the Multiplicative Complexity in Logic Networks
A Logic Synthesis Toolbox for Reducing the Multiplicative Complexity in Logic Networks Eleonora Testa∗, Mathias Soekeny, Heinz Riener∗, Luca Amaruz and Giovanni De Micheli∗ ∗Integrated Systems Laboratory, EPFL, Lausanne, Switzerland yMicrosoft, Switzerland zSynopsys Inc., Design Group, Sunnyvale, California, USA Abstract—Logic synthesis is a fundamental step in the real- correlates to the resistance of the function against algebraic ization of modern integrated circuits. It has traditionally been attacks [10], while the multiplicative complexity of a logic employed for the optimization of CMOS-based designs, as well network implementing that function only provides an upper as for emerging technologies and quantum computing. Recently, bound. Consequently, minimizing the multiplicative complexity it found application in minimizing the number of AND gates in of a network is important to assess the real multiplicative cryptography benchmarks represented as xor-and graphs (XAGs). complexity of the function, and therefore its vulnerability. The number of AND gates in an XAG, which is called the logic net- work’s multiplicative complexity, plays a critical role in various Second, the number of AND gates plays an important role cryptography and security protocols such as fully homomorphic in high-level cryptography protocols such as zero-knowledge encryption (FHE) and secure multi-party computation (MPC). protocols, fully homomorphic encryption (FHE), and secure Further, the number of AND gates is also important to assess multi-party computation (MPC) [11], [12], [6]. For example, the the degree of vulnerability of a Boolean function, and influences size of the signature in post-quantum zero-knowledge signatures the cost of techniques to protect against side-channel attacks. -

Logic Optimization and Synthesis: Trends and Directions in Industry
Logic Optimization and Synthesis: Trends and Directions in Industry Luca Amaru´∗, Patrick Vuillod†, Jiong Luo∗, Janet Olson∗ ∗ Synopsys Inc., Design Group, Sunnyvale, California, USA † Synopsys Inc., Design Group, Grenoble, France Abstract—Logic synthesis is a key design step which optimizes of specific logic styles and cell layouts. Embedding as much abstract circuit representations and links them to technology. technology information as possible early in the logic optimiza- With CMOS technology moving into the deep nanometer regime, tion engine is key to make advantageous logic restructuring logic synthesis needs to be aware of physical informations early in the flow. With the rise of enhanced functionality nanodevices, opportunities carry over at the end of the design flow. research on technology needs the help of logic synthesis to capture In this paper, we examine the synergy between logic synthe- advantageous design opportunities. This paper deals with the syn- sis and technology, from an industrial perspective. We present ergy between logic synthesis and technology, from an industrial technology aware synthesis methods incorporating advanced perspective. First, we present new synthesis techniques which physical information at the core optimization engine. Internal embed detailed physical informations at the core optimization engine. Experiments show improved Quality of Results (QoR) and results evidence faster timing closure and better correlation better correlation between RTL synthesis and physical implemen- between RTL synthesis and physical implementation. We elab- tation. Second, we discuss the application of these new synthesis orate on synthesis aware technology development, where logic techniques in the early assessment of emerging nanodevices with synthesis enables a fair system-level assessment on emerging enhanced functionality. -

Simulator for the RV32-Versat Architecture
Simulator for the RV32-Versat Architecture João César Martins Moutoso Ratinho Thesis to obtain the Master of Science Degree in Electrical and Computer Engineering Supervisor(s): Prof. José João Henriques Teixeira de Sousa Examination Committee Chairperson: Prof. Francisco André Corrêa Alegria Supervisor: Prof. José João Henriques Teixeira de Sousa Member of the Committee: Prof. Marcelino Bicho dos Santos November 2019 ii Declaration I declare that this document is an original work of my own authorship and that it fulfills all the require- ments of the Code of Conduct and Good Practices of the Universidade de Lisboa. iii iv Acknowledgments I want to thank my supervisor, Professor Jose´ Teixeira de Sousa, for the opportunity to develop this work and for his guidance and support during that process. His help was fundamental to overcome the multiple obstacles that I faced during this work. I also want to acknowledge Professor Horacio´ Neto for providing a simple Convolutional Neural Net- work application, used as a basis for the application developed for the RV32-Versat architecture. A special acknowledgement goes to my friends, for their continuous support, and Valter,´ that is developing a multi-layer architecture for RV32-Versat. When everything seemed to be doomed he always had a miraculous solution. Finally, I want to express my sincere gratitude to my family for giving me all the support and encour- agement that I needed throughout my years of study and through the process of researching and writing this thesis. They are also part of this work. Thank you. v vi Resumo Esta tese apresenta um novo ambiente de simulac¸ao˜ para a arquitectura RV32-Versat baseado na ferramenta de simulac¸ao˜ Verilator. -
Portable Stimulus: What's Coming in 1.1
Portable Stimulus: What’s Coming in 1.1 and What it Means For You Portable Stimulus Working Group PSS 1.1 Tutorial Agenda • What is PSS Introduction • Tom Fitzpatrick, • Abstract DMA model in PSS 1.0 Mentor, a Siemens Business Memory • The problem • Prabhat Gupta, AMD Allocation • New PSS concepts Higher-Level • The problem • Matan Vax, Scenarios • New constructs Cadence Design Systems • The problem • Karthick Gururaj, HSI Realization • New concepts and constructs Vayavya Labs System-Level • Portability • Hillel Miller, Synopsys Usage • Complex scenarios • Summary Special Thanks to: Conclusion • What’s next Dave Kelf, Breker Verification Systems Josh Rensch, Semifore 2 The Need for Verification Abstraction Test content authoring represents major proportion of development SIMULATION Disconnected cross-process methods Test Content • Block EMULATION • UVM tests laborious, error-prone • SoC FPGA PROTO • Hard to hit corner-cases with C tests • Post-Silicon • Disconnected diagnostic creation IP BLOCK SUBSYSTEM FULL SYSTEM Test portability, reuse, scaling, maintenance all problematic 3 Key Aspects of Portable Stimulus Capture pure Partial scenario Composable Formal Automated test Target multiple test intent description scenarios representation generation platforms of test space Separate test intent from implementation High-coverage test generation across the verification process with much less effort 4 PSS Improves Individual Verification Phases IP BLOCK SUB-SYSTEM FULL SYSTEM Create block-level (UVM) tests & Easily model system-level Generate -
Arm Cortex-M System Design Kit Technical Reference Manual
Arm® Cortex®-M System Design Kit Revision: r1p1 Technical Reference Manual Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. ARM DDI 0479D (ID110617) Arm Cortex-M System Design Kit Technical Reference Manual Copyright © 2011, 2013, 2017 Arm Limited (or its affiliates). All rights reserved. Release Information The following changes have been made to this document: Change history Date Issue Confidentiality Change 14 March 2011 A Non-Confidential First release for r0p0 16 June 2011 B Non-Confidential Second release for r0p0 19 April 2013 C Non-Confidential First release for r1p0 31 October 2017 D Non-Confidential First release for r1p1 Proprietary Notice This document is protected by copyright and other related rights and the practice or implementation of the information contained in this document may be protected by one or more patents or pending patent applications. No part of this document may be reproduced in any form by any means without the express prior written permission of Arm. No license, express or implied, by estoppel or otherwise to any intellectual property rights is granted by this document unless specifically stated. Your access to the information in this document is conditional upon your acceptance that you will not use or permit others to use the information for the purposes of determining whether implementations infringe any third party patents. THIS DOCUMENT IS PROVIDED “AS IS”. ARM PROVIDES NO REPRESENTATIONS AND NO WARRANTIES, EXPRESS, IMPLIED OR STATUTORY, INCLUDING, WITHOUT LIMITATION, THE IMPLIED WARRANTIES OF MERCHANTABILITY, SATISFACTORY QUALITY, NON-INFRINGEMENT OR FITNESS FOR A PARTICULAR PURPOSE WITH RESPECT TO THE DOCUMENT. -

Workshop on Post-Silicon Debug: Technologies, Methodologies, and Best Practices
Wisam Kadry – IBM Research, Haifa 7 June 2012 Workshop on Post-silicon Debug: Technologies, Methodologies, and Best Practices © 2012 IBM Corporation DAC 2012, Post-silicon Debug Workshop Thanks to Mr. Amir Nahir IBM Research – Haifa, Israel Received his BSc in computer science from Technion, IIT in 2005, and is currently pursuing his PhD there. He has been a research staff member at the IBM Research Labs in Haifa since 2006, and has spent most of his time leading the development of Threadmill – a post-silicon functional validation exerciser. Since the beginning of 2011, Amir manages the Post-Silicon Validation and Design Automation Group 2 © 2012 IBM Corporation DAC 2012, Post-silicon Debug Workshop Agenda Session I (09:00-10:30) Wisam Kadry - IBM Haifa Research Lab., Haifa, Israel Kevin Reick - IBM Corp., Austin, TX Subhasish Mitra - Stanford Univ., Stanford, CA David Erikson - Advanced Micro Devices, Fort Collins, CO Bradley Quinton - Tektronix, Inc., Vancouver, BC, Canada Break (10:30-11:00) Session II (11:00-12:30) Alan Hu - Univ. of British Columbia, Vancouver, BC, Canada Keshavan Tiruvallur - Intel Corp., Portland, OR Nagib Hakim - Intel Corp., Santa Clara, CA Valeria Bertacco - Univ. of Michigan, Ann Arbor, MI Sharad Kumar - Freescale Semiconductor, Inc., Noida, India Lunch (12:30-13:30) Panel (13:30-15:00) Moderator: Harry Foster - Mentor Graphics Corp., Plano, TX 3 © 2012 IBM Corporation DAC 2012, Post-silicon Debug Workshop More complex chips 4 © 2012 IBM Corporation DAC 2012, Post-silicon Debug Workshop Observe 5 © 2012 IBM -

Designing a RISC CPU in Reversible Logic
Designing a RISC CPU in Reversible Logic Robert Wille Mathias Soeken Daniel Große Eleonora Schonborn¨ Rolf Drechsler Institute of Computer Science, University of Bremen, 28359 Bremen, Germany frwille,msoeken,grosse,eleonora,[email protected] Abstract—Driven by its promising applications, reversible logic In this paper, the recent progress in the field of reversible cir- received significant attention. As a result, an impressive progress cuit design is employed in order to design a complex system, has been made in the development of synthesis approaches, i.e. a RISC CPU composed of reversible gates. Starting from implementation of sequential elements, and hardware description languages. In this paper, these recent achievements are employed a textual specification, first the core components of the CPU in order to design a RISC CPU in reversible logic that can are identified. Previously introduced approaches are applied execute software programs written in an assembler language. The next to realize the respective combinational and sequential respective combinational and sequential components are designed elements. More precisely, the combinational components are using state-of-the-art design techniques. designed using the reversible hardware description language SyReC [17], whereas for the realization of the sequential I. INTRODUCTION elements an external controller (as suggested in [16]) is utilized. With increasing miniaturization of integrated circuits, the Plugging the respective components together, a CPU design reduction of power dissipation has become a crucial issue in results which can process software programs written in an today’s hardware design process. While due to high integration assembler language. This is demonstrated in a case study, density and new fabrication processes, energy loss has sig- where the execution of a program determining Fibonacci nificantly been reduced over the last decades, physical limits numbers is simulated. -

Logic Synthesis Meets Machine Learning: Trading Exactness for Generalization
Logic Synthesis Meets Machine Learning: Trading Exactness for Generalization Shubham Raif,6,y, Walter Lau Neton,10,y, Yukio Miyasakao,1, Xinpei Zhanga,1, Mingfei Yua,1, Qingyang Yia,1, Masahiro Fujitaa,1, Guilherme B. Manskeb,2, Matheus F. Pontesb,2, Leomar S. da Rosa Juniorb,2, Marilton S. de Aguiarb,2, Paulo F. Butzene,2, Po-Chun Chienc,3, Yu-Shan Huangc,3, Hoa-Ren Wangc,3, Jie-Hong R. Jiangc,3, Jiaqi Gud,4, Zheng Zhaod,4, Zixuan Jiangd,4, David Z. Pand,4, Brunno A. de Abreue,5,9, Isac de Souza Camposm,5,9, Augusto Berndtm,5,9, Cristina Meinhardtm,5,9, Jonata T. Carvalhom,5,9, Mateus Grellertm,5,9, Sergio Bampie,5, Aditya Lohanaf,6, Akash Kumarf,6, Wei Zengj,7, Azadeh Davoodij,7, Rasit O. Topalogluk,7, Yuan Zhoul,8, Jordan Dotzell,8, Yichi Zhangl,8, Hanyu Wangl,8, Zhiru Zhangl,8, Valerio Tenacen,10, Pierre-Emmanuel Gaillardonn,10, Alan Mishchenkoo,y, and Satrajit Chatterjeep,y aUniversity of Tokyo, Japan, bUniversidade Federal de Pelotas, Brazil, cNational Taiwan University, Taiwan, dUniversity of Texas at Austin, USA, eUniversidade Federal do Rio Grande do Sul, Brazil, fTechnische Universitaet Dresden, Germany, jUniversity of Wisconsin–Madison, USA, kIBM, USA, lCornell University, USA, mUniversidade Federal de Santa Catarina, Brazil, nUniversity of Utah, USA, oUC Berkeley, USA, pGoogle AI, USA The alphabetic characters in the superscript represent the affiliations while the digits represent the team numbers yEqual contribution. Email: [email protected], [email protected], [email protected], [email protected] Abstract—Logic synthesis is a fundamental step in hard- artificial intelligence. -

Low Power Asynchronous Digital Signal Processing
LOW POWER ASYNCHRONOUS DIGITAL SIGNAL PROCESSING A thesis submitted to the University of Manchester for the degree of Doctor of Philosophy in the Faculty of Science & Engineering October 2000 Michael John George Lewis Department of Computer Science 1 Contents Chapter 1: Introduction ....................................................................................14 Digital Signal Processing ...............................................................................15 Evolution of digital signal processors ....................................................17 Architectural features of modern DSPs .........................................................19 High performance multiplier circuits .....................................................20 Memory architecture ..............................................................................21 Data address generation .........................................................................21 Loop management ..................................................................................23 Numerical precision, overflows and rounding .......................................24 Architecture of the GSM Mobile Phone System ...........................................25 Channel equalization ..............................................................................28 Error correction and Viterbi decoding ...................................................29 Speech transcoding ................................................................................31 Half-rate and enhanced -
Lattice Radiant Software 1.1 Help
Lattice Radiant Software 1.1 Help March 29, 2019 Copyright Copyright © 2019 Lattice Semiconductor Corporation. All rights reserved. This document may not, in whole or part, be reproduced, modified, distributed, or publicly displayed without prior written consent from Lattice Semiconductor Corporation (“Lattice”). Trademarks All Lattice trademarks are as listed at www.latticesemi.com/legal. Synopsys and Synplify Pro are trademarks of Synopsys, Inc. Aldec and Active-HDL are trademarks of Aldec, Inc. All other trademarks are the property of their respective owners. Disclaimers NO WARRANTIES: THE INFORMATION PROVIDED IN THIS DOCUMENT IS “AS IS” WITHOUT ANY EXPRESS OR IMPLIED WARRANTY OF ANY KIND INCLUDING WARRANTIES OF ACCURACY, COMPLETENESS, MERCHANTABILITY, NONINFRINGEMENT OF INTELLECTUAL PROPERTY, OR FITNESS FOR ANY PARTICULAR PURPOSE. IN NO EVENT WILL LATTICE OR ITS SUPPLIERS BE LIABLE FOR ANY DAMAGES WHATSOEVER (WHETHER DIRECT, INDIRECT, SPECIAL, INCIDENTAL, OR CONSEQUENTIAL, INCLUDING, WITHOUT LIMITATION, DAMAGES FOR LOSS OF PROFITS, BUSINESS INTERRUPTION, OR LOSS OF INFORMATION) ARISING OUT OF THE USE OF OR INABILITY TO USE THE INFORMATION PROVIDED IN THIS DOCUMENT, EVEN IF LATTICE HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. BECAUSE SOME JURISDICTIONS PROHIBIT THE EXCLUSION OR LIMITATION OF CERTAIN LIABILITY, SOME OF THE ABOVE LIMITATIONS MAY NOT APPLY TO YOU. Lattice may make changes to these materials, specifications, or information, or to the products described herein, at any time without notice. Lattice makes no commitment to update this documentation. Lattice reserves the right to discontinue any product or service without notice and assumes no obligation to correct any errors contained herein or to advise any user of this document of any correction if such be made.