Chapter 3 Vectors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Relativistic Dynamics
Chapter 4 Relativistic dynamics We have seen in the previous lectures that our relativity postulates suggest that the most efficient (lazy but smart) approach to relativistic physics is in terms of 4-vectors, and that velocities never exceed c in magnitude. In this chapter we will see how this 4-vector approach works for dynamics, i.e., for the interplay between motion and forces. A particle subject to forces will undergo non-inertial motion. According to Newton, there is a simple (3-vector) relation between force and acceleration, f~ = m~a; (4.0.1) where acceleration is the second time derivative of position, d~v d2~x ~a = = : (4.0.2) dt dt2 There is just one problem with these relations | they are wrong! Newtonian dynamics is a good approximation when velocities are very small compared to c, but outside of this regime the relation (4.0.1) is simply incorrect. In particular, these relations are inconsistent with our relativity postu- lates. To see this, it is sufficient to note that Newton's equations (4.0.1) and (4.0.2) predict that a particle subject to a constant force (and initially at rest) will acquire a velocity which can become arbitrarily large, Z t ~ d~v 0 f ~v(t) = 0 dt = t ! 1 as t ! 1 . (4.0.3) 0 dt m This flatly contradicts the prediction of special relativity (and causality) that no signal can propagate faster than c. Our task is to understand how to formulate the dynamics of non-inertial particles in a manner which is consistent with our relativity postulates (and then verify that it matches observation, including in the non-relativistic regime). -

Vectors, Matrices and Coordinate Transformations
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between them, physical laws can often be written in a simple form. Since we will making extensive use of vectors in Dynamics, we will summarize some of their important properties. Vectors For our purposes we will think of a vector as a mathematical representation of a physical entity which has both magnitude and direction in a 3D space. Examples of physical vectors are forces, moments, and velocities. Geometrically, a vector can be represented as arrows. The length of the arrow represents its magnitude. Unless indicated otherwise, we shall assume that parallel translation does not change a vector, and we shall call the vectors satisfying this property, free vectors. Thus, two vectors are equal if and only if they are parallel, point in the same direction, and have equal length. Vectors are usually typed in boldface and scalar quantities appear in lightface italic type, e.g. the vector quantity A has magnitude, or modulus, A = |A|. In handwritten text, vectors are often expressed using the −→ arrow, or underbar notation, e.g. A , A. Vector Algebra Here, we introduce a few useful operations which are defined for free vectors. Multiplication by a scalar If we multiply a vector A by a scalar α, the result is a vector B = αA, which has magnitude B = |α|A. The vector B, is parallel to A and points in the same direction if α > 0. -

More on Vectors Math 122 Calculus III D Joyce, Fall 2012
More on Vectors Math 122 Calculus III D Joyce, Fall 2012 Unit vectors. A unit vector is a vector whose length is 1. If a unit vector u in the plane R2 is placed in standard position with its tail at the origin, then it's head will land on the unit circle x2 + y2 = 1. Every point on the unit circle (x; y) is of the form (cos θ; sin θ) where θ is the angle measured from the positive x-axis in the counterclockwise direction. u=(x;y)=(cos θ; sin θ) 7 '$θ q &% Thus, every unit vector in the plane is of the form u = (cos θ; sin θ). We can interpret unit vectors as being directions, and we can use them in place of angles since they carry the same information as an angle. In three dimensions, we also use unit vectors and they will still signify directions. Unit 3 vectors in R correspond to points on the sphere because if u = (u1; u2; u3) is a unit vector, 2 2 2 3 then u1 + u2 + u3 = 1. Each unit vector in R carries more information than just one angle since, if you want to name a point on a sphere, you need to give two angles, longitude and latitude. Now that we have unit vectors, we can treat every vector v as a length and a direction. The length of v is kvk, of course. And its direction is the unit vector u in the same direction which can be found by v u = : kvk The vector v can be reconstituted from its length and direction by multiplying v = kvk u. -

Lecture 3.Pdf
ENGR-1100 Introduction to Engineering Analysis Lecture 3 POSITION VECTORS & FORCE VECTORS Today’s Objectives: Students will be able to : a) Represent a position vector in Cartesian coordinate form, from given geometry. In-Class Activities: • Applications / b) Represent a force vector directed along Relevance a line. • Write Position Vectors • Write a Force Vector along a line 1 DOT PRODUCT Today’s Objective: Students will be able to use the vector dot product to: a) determine an angle between In-Class Activities: two vectors, and, •Applications / Relevance b) determine the projection of a vector • Dot product - Definition along a specified line. • Angle Determination • Determining the Projection APPLICATIONS This ship’s mooring line, connected to the bow, can be represented as a Cartesian vector. What are the forces in the mooring line and how do we find their directions? Why would we want to know these things? 2 APPLICATIONS (continued) This awning is held up by three chains. What are the forces in the chains and how do we find their directions? Why would we want to know these things? POSITION VECTOR A position vector is defined as a fixed vector that locates a point in space relative to another point. Consider two points, A and B, in 3-D space. Let their coordinates be (XA, YA, ZA) and (XB, YB, ZB), respectively. 3 POSITION VECTOR The position vector directed from A to B, rAB , is defined as rAB = {( XB –XA ) i + ( YB –YA ) j + ( ZB –ZA ) k }m Please note that B is the ending point and A is the starting point. -

The Dot Product
The Dot Product In this section, we will now concentrate on the vector operation called the dot product. The dot product of two vectors will produce a scalar instead of a vector as in the other operations that we examined in the previous section. The dot product is equal to the sum of the product of the horizontal components and the product of the vertical components. If v = a1 i + b1 j and w = a2 i + b2 j are vectors then their dot product is given by: v · w = a1 a2 + b1 b2 Properties of the Dot Product If u, v, and w are vectors and c is a scalar then: u · v = v · u u · (v + w) = u · v + u · w 0 · v = 0 v · v = || v || 2 (cu) · v = c(u · v) = u · (cv) Example 1: If v = 5i + 2j and w = 3i – 7j then find v · w. Solution: v · w = a1 a2 + b1 b2 v · w = (5)(3) + (2)(-7) v · w = 15 – 14 v · w = 1 Example 2: If u = –i + 3j, v = 7i – 4j and w = 2i + j then find (3u) · (v + w). Solution: Find 3u 3u = 3(–i + 3j) 3u = –3i + 9j Find v + w v + w = (7i – 4j) + (2i + j) v + w = (7 + 2) i + (–4 + 1) j v + w = 9i – 3j Example 2 (Continued): Find the dot product between (3u) and (v + w) (3u) · (v + w) = (–3i + 9j) · (9i – 3j) (3u) · (v + w) = (–3)(9) + (9)(-3) (3u) · (v + w) = –27 – 27 (3u) · (v + w) = –54 An alternate formula for the dot product is available by using the angle between the two vectors. -

Concept of a Dyad and Dyadic: Consider Two Vectors a and B Dyad: It Consists of a Pair of Vectors a B for Two Vectors a a N D B
1/11/2010 CHAPTER 1 Introductory Concepts • Elements of Vector Analysis • Newton’s Laws • Units • The basis of Newtonian Mechanics • D’Alembert’s Principle 1 Science of Mechanics: It is concerned with the motion of material bodies. • Bodies have different scales: Microscropic, macroscopic and astronomic scales. In mechanics - mostly macroscopic bodies are considered. • Speed of motion - serves as another important variable - small and high (approaching speed of light). 2 1 1/11/2010 • In Newtonian mechanics - study motion of bodies much bigger than particles at atomic scale, and moving at relative motions (speeds) much smaller than the speed of light. • Two general approaches: – Vectorial dynamics: uses Newton’s laws to write the equations of motion of a system, motion is described in physical coordinates and their derivatives; – Analytical dynamics: uses energy like quantities to define the equations of motion, uses the generalized coordinates to describe motion. 3 1.1 Vector Analysis: • Scalars, vectors, tensors: – Scalar: It is a quantity expressible by a single real number. Examples include: mass, time, temperature, energy, etc. – Vector: It is a quantity which needs both direction and magnitude for complete specification. – Actually (mathematically), it must also have certain transformation properties. 4 2 1/11/2010 These properties are: vector magnitude remains unchanged under rotation of axes. ex: force, moment of a force, velocity, acceleration, etc. – geometrically, vectors are shown or depicted as directed line segments of proper magnitude and direction. 5 e (unit vector) A A = A e – if we use a coordinate system, we define a basis set (iˆ , ˆj , k ˆ ): we can write A = Axi + Ay j + Azk Z or, we can also use the A three components and Y define X T {A}={Ax,Ay,Az} 6 3 1/11/2010 – The three components Ax , Ay , Az can be used as 3-dimensional vector elements to specify the vector. -

Two Worked out Examples of Rotations Using Quaternions
TWO WORKED OUT EXAMPLES OF ROTATIONS USING QUATERNIONS This note is an attachment to the article \Rotations and Quaternions" which in turn is a companion to the video of the talk by the same title. Example 1. Determine the image of the point (1; −1; 2) under the rotation by an angle of 60◦ about an axis in the yz-plane that is inclined at an angle of 60◦ to the positive y-axis. p ◦ ◦ 1 3 Solution: The unit vector u in the direction of the axis of rotation is cos 60 j + sin 60 k = 2 j + 2 k. The quaternion (or vector) corresponding to the point p = (1; −1; 2) is of course p = i − j + 2k. To find −1 θ θ the image of p under the rotation, we calculate qpq where q is the quaternion cos 2 + sin 2 u and θ the angle of rotation (60◦ in this case). The resulting quaternion|if we did the calculation right|would have no constant term and therefore we can interpret it as a vector. That vector gives us the answer. p p p p p We have q = 3 + 1 u = 3 + 1 j + 3 k = 1 (2 3 + j + 3k). Since q is by construction a unit quaternion, 2 2 2 4 p4 4 p −1 1 its inverse is its conjugate: q = 4 (2 3 − j − 3k). Now, computing qp in the routine way, we get 1 p p p p qp = ((1 − 2 3) + (2 + 3 3)i − 3j + (4 3 − 1)k) 4 and then another long but routine computation gives 1 p p p qpq−1 = ((10 + 4 3)i + (1 + 2 3)j + (14 − 3 3)k) 8 The point corresponding to the vector on the right hand side in the above equation is the image of (1; −1; 2) under the given rotation. -

Basics of Linear Algebra
Basics of Linear Algebra Jos and Sophia Vectors ● Linear Algebra Definition: A list of numbers with a magnitude and a direction. ○ Magnitude: a = [4,3] |a| =sqrt(4^2+3^2)= 5 ○ Direction: angle vector points ● Computer Science Definition: A list of numbers. ○ Example: Heights = [60, 68, 72, 67] Dot Product of Vectors Formula: a · b = |a| × |b| × cos(θ) ● Definition: Multiplication of two vectors which results in a scalar value ● In the diagram: ○ |a| is the magnitude (length) of vector a ○ |b| is the magnitude of vector b ○ Θ is the angle between a and b Matrix ● Definition: ● Matrix elements: ● a)Matrix is an arrangement of numbers into rows and columns. ● b) A matrix is an m × n array of scalars from a given field F. The individual values in the matrix are called entries. ● Matrix dimensions: the number of rows and columns of the matrix, in that order. Multiplication of Matrices ● The multiplication of two matrices ● Result matrix dimensions ○ Notation: (Row, Column) ○ Columns of the 1st matrix must equal the rows of the 2nd matrix ○ Result matrix is equal to the number of (1, 2, 3) • (7, 9, 11) = 1×7 +2×9 + 3×11 rows in 1st matrix and the number of = 58 columns in the 2nd matrix ○ Ex. 3 x 4 ॱ 5 x 3 ■ Dot product does not work ○ Ex. 5 x 3 ॱ 3 x 4 ■ Dot product does work ■ Result: 5 x 4 Dot Product Application ● Application: Ray tracing program ○ Quickly create an image with lower quality ○ “Refinement rendering pass” occurs ■ Removes the jagged edges ○ Dot product used to calculate ■ Intersection between a ray and a sphere ■ Measure the length to the intersection points ● Application: Forward Propagation ○ Input matrix * weighted matrix = prediction matrix http://immersivemath.com/ila/ch03_dotprodu ct/ch03.html#fig_dp_ray_tracer Projections One important use of dot products is in projections. -

A Guided Tour to the Plane-Based Geometric Algebra PGA
A Guided Tour to the Plane-Based Geometric Algebra PGA Leo Dorst University of Amsterdam Version 1.15{ July 6, 2020 Planes are the primitive elements for the constructions of objects and oper- ators in Euclidean geometry. Triangulated meshes are built from them, and reflections in multiple planes are a mathematically pure way to construct Euclidean motions. A geometric algebra based on planes is therefore a natural choice to unify objects and operators for Euclidean geometry. The usual claims of `com- pleteness' of the GA approach leads us to hope that it might contain, in a single framework, all representations ever designed for Euclidean geometry - including normal vectors, directions as points at infinity, Pl¨ucker coordinates for lines, quaternions as 3D rotations around the origin, and dual quaternions for rigid body motions; and even spinors. This text provides a guided tour to this algebra of planes PGA. It indeed shows how all such computationally efficient methods are incorporated and related. We will see how the PGA elements naturally group into blocks of four coordinates in an implementation, and how this more complete under- standing of the embedding suggests some handy choices to avoid extraneous computations. In the unified PGA framework, one never switches between efficient representations for subtasks, and this obviously saves any time spent on data conversions. Relative to other treatments of PGA, this text is rather light on the mathematics. Where you see careful derivations, they involve the aspects of orientation and magnitude. These features have been neglected by authors focussing on the mathematical beauty of the projective nature of the algebra. -

History of Mathematics Log of a Course
History of mathematics Log of a course David Pierce / This work is licensed under the Creative Commons Attribution–Noncommercial–Share-Alike License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3.0/ CC BY: David Pierce $\ C Mathematics Department Middle East Technical University Ankara Turkey http://metu.edu.tr/~dpierce/ [email protected] Contents Prolegomena Whatishere .................................. Apology..................................... Possibilitiesforthefuture . I. Fall semester . Euclid .. Sunday,October ............................ .. Thursday,October ........................... .. Friday,October ............................. .. Saturday,October . .. Tuesday,October ........................... .. Friday,October ............................ .. Thursday,October. .. Saturday,October . .. Wednesday,October. ..Friday,November . ..Friday,November . ..Wednesday,November. ..Friday,November . ..Friday,November . ..Saturday,November. ..Friday,December . ..Tuesday,December . . Apollonius and Archimedes .. Tuesday,December . .. Saturday,December . .. Friday,January ............................. .. Friday,January ............................. Contents II. Spring semester Aboutthecourse ................................ . Al-Khw¯arizm¯ı, Th¯abitibnQurra,OmarKhayyám .. Thursday,February . .. Tuesday,February. .. Thursday,February . .. Tuesday,March ............................. . Cardano .. Thursday,March ............................ .. Excursus................................. -

1 Vectors & Tensors
1 Vectors & Tensors The mathematical modeling of the physical world requires knowledge of quite a few different mathematics subjects, such as Calculus, Differential Equations and Linear Algebra. These topics are usually encountered in fundamental mathematics courses. However, in a more thorough and in-depth treatment of mechanics, it is essential to describe the physical world using the concept of the tensor, and so we begin this book with a comprehensive chapter on the tensor. The chapter is divided into three parts. The first part covers vectors (§1.1-1.7). The second part is concerned with second, and higher-order, tensors (§1.8-1.15). The second part covers much of the same ground as done in the first part, mainly generalizing the vector concepts and expressions to tensors. The final part (§1.16-1.19) (not required in the vast majority of applications) is concerned with generalizing the earlier work to curvilinear coordinate systems. The first part comprises basic vector algebra, such as the dot product and the cross product; the mathematics of how the components of a vector transform between different coordinate systems; the symbolic, index and matrix notations for vectors; the differentiation of vectors, including the gradient, the divergence and the curl; the integration of vectors, including line, double, surface and volume integrals, and the integral theorems. The second part comprises the definition of the tensor (and a re-definition of the vector); dyads and dyadics; the manipulation of tensors; properties of tensors, such as the trace, transpose, norm, determinant and principal values; special tensors, such as the spherical, identity and orthogonal tensors; the transformation of tensor components between different coordinate systems; the calculus of tensors, including the gradient of vectors and higher order tensors and the divergence of higher order tensors and special fourth order tensors. -
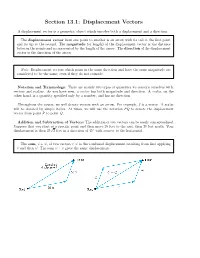
Section 13.1: Displacement Vectors
Section 13.1: Displacement Vectors A displacement vector is a geometric object which encodes both a displacement and a direction. The displacement vector from one point to another is an arrow with its tail at the first point and its tip at the second. The magnitude (or length) of the displacement vector is the distance between the points and is represented by the length of the arrow. The direction of the displacement vector is the direction of the arrow. Note: Displacement vectors which point in the same direction and have the same magnitude are considered to be the same, even if they do not coincide. Notation and Terminology: There are mainly two types of quantities we concern ourselves with: vectors and scalars. As you have seen, a vector has both magnitude and direction. A scalar, on the other hand, is a quantity specified only by a number, and has no direction. Throughout the course, we will denote vectors with an arrow. For example, ~v is a vector. A scalar will be denoted by simple italics. At times, we will use the notation PQ~ to denote the displacement vector from point P to point Q. Addition and Subtraction of Vectors: The addition of two vectors can be easily conceptualized. Suppose that you startp at a specific point and then move 25 feet to the east, then 25 feet north. Your displacement is then 25 2 feet in a direction of 45◦ with respect to the horizontal. The sum, ~v + ~w, of two vectors ~v~w is the combined displacement resulting from first applying ~v and then ~w.