A Quick Study on Quaternions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Relativistic Dynamics
Chapter 4 Relativistic dynamics We have seen in the previous lectures that our relativity postulates suggest that the most efficient (lazy but smart) approach to relativistic physics is in terms of 4-vectors, and that velocities never exceed c in magnitude. In this chapter we will see how this 4-vector approach works for dynamics, i.e., for the interplay between motion and forces. A particle subject to forces will undergo non-inertial motion. According to Newton, there is a simple (3-vector) relation between force and acceleration, f~ = m~a; (4.0.1) where acceleration is the second time derivative of position, d~v d2~x ~a = = : (4.0.2) dt dt2 There is just one problem with these relations | they are wrong! Newtonian dynamics is a good approximation when velocities are very small compared to c, but outside of this regime the relation (4.0.1) is simply incorrect. In particular, these relations are inconsistent with our relativity postu- lates. To see this, it is sufficient to note that Newton's equations (4.0.1) and (4.0.2) predict that a particle subject to a constant force (and initially at rest) will acquire a velocity which can become arbitrarily large, Z t ~ d~v 0 f ~v(t) = 0 dt = t ! 1 as t ! 1 . (4.0.3) 0 dt m This flatly contradicts the prediction of special relativity (and causality) that no signal can propagate faster than c. Our task is to understand how to formulate the dynamics of non-inertial particles in a manner which is consistent with our relativity postulates (and then verify that it matches observation, including in the non-relativistic regime). -

More on Vectors Math 122 Calculus III D Joyce, Fall 2012
More on Vectors Math 122 Calculus III D Joyce, Fall 2012 Unit vectors. A unit vector is a vector whose length is 1. If a unit vector u in the plane R2 is placed in standard position with its tail at the origin, then it's head will land on the unit circle x2 + y2 = 1. Every point on the unit circle (x; y) is of the form (cos θ; sin θ) where θ is the angle measured from the positive x-axis in the counterclockwise direction. u=(x;y)=(cos θ; sin θ) 7 '$θ q &% Thus, every unit vector in the plane is of the form u = (cos θ; sin θ). We can interpret unit vectors as being directions, and we can use them in place of angles since they carry the same information as an angle. In three dimensions, we also use unit vectors and they will still signify directions. Unit 3 vectors in R correspond to points on the sphere because if u = (u1; u2; u3) is a unit vector, 2 2 2 3 then u1 + u2 + u3 = 1. Each unit vector in R carries more information than just one angle since, if you want to name a point on a sphere, you need to give two angles, longitude and latitude. Now that we have unit vectors, we can treat every vector v as a length and a direction. The length of v is kvk, of course. And its direction is the unit vector u in the same direction which can be found by v u = : kvk The vector v can be reconstituted from its length and direction by multiplying v = kvk u. -

Lecture 3.Pdf
ENGR-1100 Introduction to Engineering Analysis Lecture 3 POSITION VECTORS & FORCE VECTORS Today’s Objectives: Students will be able to : a) Represent a position vector in Cartesian coordinate form, from given geometry. In-Class Activities: • Applications / b) Represent a force vector directed along Relevance a line. • Write Position Vectors • Write a Force Vector along a line 1 DOT PRODUCT Today’s Objective: Students will be able to use the vector dot product to: a) determine an angle between In-Class Activities: two vectors, and, •Applications / Relevance b) determine the projection of a vector • Dot product - Definition along a specified line. • Angle Determination • Determining the Projection APPLICATIONS This ship’s mooring line, connected to the bow, can be represented as a Cartesian vector. What are the forces in the mooring line and how do we find their directions? Why would we want to know these things? 2 APPLICATIONS (continued) This awning is held up by three chains. What are the forces in the chains and how do we find their directions? Why would we want to know these things? POSITION VECTOR A position vector is defined as a fixed vector that locates a point in space relative to another point. Consider two points, A and B, in 3-D space. Let their coordinates be (XA, YA, ZA) and (XB, YB, ZB), respectively. 3 POSITION VECTOR The position vector directed from A to B, rAB , is defined as rAB = {( XB –XA ) i + ( YB –YA ) j + ( ZB –ZA ) k }m Please note that B is the ending point and A is the starting point. -

Concept of a Dyad and Dyadic: Consider Two Vectors a and B Dyad: It Consists of a Pair of Vectors a B for Two Vectors a a N D B
1/11/2010 CHAPTER 1 Introductory Concepts • Elements of Vector Analysis • Newton’s Laws • Units • The basis of Newtonian Mechanics • D’Alembert’s Principle 1 Science of Mechanics: It is concerned with the motion of material bodies. • Bodies have different scales: Microscropic, macroscopic and astronomic scales. In mechanics - mostly macroscopic bodies are considered. • Speed of motion - serves as another important variable - small and high (approaching speed of light). 2 1 1/11/2010 • In Newtonian mechanics - study motion of bodies much bigger than particles at atomic scale, and moving at relative motions (speeds) much smaller than the speed of light. • Two general approaches: – Vectorial dynamics: uses Newton’s laws to write the equations of motion of a system, motion is described in physical coordinates and their derivatives; – Analytical dynamics: uses energy like quantities to define the equations of motion, uses the generalized coordinates to describe motion. 3 1.1 Vector Analysis: • Scalars, vectors, tensors: – Scalar: It is a quantity expressible by a single real number. Examples include: mass, time, temperature, energy, etc. – Vector: It is a quantity which needs both direction and magnitude for complete specification. – Actually (mathematically), it must also have certain transformation properties. 4 2 1/11/2010 These properties are: vector magnitude remains unchanged under rotation of axes. ex: force, moment of a force, velocity, acceleration, etc. – geometrically, vectors are shown or depicted as directed line segments of proper magnitude and direction. 5 e (unit vector) A A = A e – if we use a coordinate system, we define a basis set (iˆ , ˆj , k ˆ ): we can write A = Axi + Ay j + Azk Z or, we can also use the A three components and Y define X T {A}={Ax,Ay,Az} 6 3 1/11/2010 – The three components Ax , Ay , Az can be used as 3-dimensional vector elements to specify the vector. -

Two Worked out Examples of Rotations Using Quaternions
TWO WORKED OUT EXAMPLES OF ROTATIONS USING QUATERNIONS This note is an attachment to the article \Rotations and Quaternions" which in turn is a companion to the video of the talk by the same title. Example 1. Determine the image of the point (1; −1; 2) under the rotation by an angle of 60◦ about an axis in the yz-plane that is inclined at an angle of 60◦ to the positive y-axis. p ◦ ◦ 1 3 Solution: The unit vector u in the direction of the axis of rotation is cos 60 j + sin 60 k = 2 j + 2 k. The quaternion (or vector) corresponding to the point p = (1; −1; 2) is of course p = i − j + 2k. To find −1 θ θ the image of p under the rotation, we calculate qpq where q is the quaternion cos 2 + sin 2 u and θ the angle of rotation (60◦ in this case). The resulting quaternion|if we did the calculation right|would have no constant term and therefore we can interpret it as a vector. That vector gives us the answer. p p p p p We have q = 3 + 1 u = 3 + 1 j + 3 k = 1 (2 3 + j + 3k). Since q is by construction a unit quaternion, 2 2 2 4 p4 4 p −1 1 its inverse is its conjugate: q = 4 (2 3 − j − 3k). Now, computing qp in the routine way, we get 1 p p p p qp = ((1 − 2 3) + (2 + 3 3)i − 3j + (4 3 − 1)k) 4 and then another long but routine computation gives 1 p p p qpq−1 = ((10 + 4 3)i + (1 + 2 3)j + (14 − 3 3)k) 8 The point corresponding to the vector on the right hand side in the above equation is the image of (1; −1; 2) under the given rotation. -

Chapter 3 Vectors
Chapter 3 Vectors 3.1 Vector Analysis ....................................................................................................... 1 3.1.1 Introduction to Vectors ................................................................................... 1 3.1.2 Properties of Vectors ....................................................................................... 1 3.2 Cartesian Coordinate System ................................................................................ 5 3.2.1 Cartesian Coordinates ..................................................................................... 6 3.3 Application of Vectors ............................................................................................ 8 Example 3.1 Vector Addition ................................................................................. 12 Example 3.2 Sinking Sailboat ................................................................................ 13 Example 3.3 Vector Description of a Point on a Line .......................................... 14 Example 3.4 Rotated Coordinate Systems ............................................................ 15 Example 3.5 Vector Description in Rotated Coordinate Systems ...................... 15 Example 3.6 Vector Addition ................................................................................. 17 Chapter 3 Vectors Philosophy is written in this grand book, the universe which stands continually open to our gaze. But the book cannot be understood unless one first learns to comprehend the language and -

1 Vectors & Tensors
1 Vectors & Tensors The mathematical modeling of the physical world requires knowledge of quite a few different mathematics subjects, such as Calculus, Differential Equations and Linear Algebra. These topics are usually encountered in fundamental mathematics courses. However, in a more thorough and in-depth treatment of mechanics, it is essential to describe the physical world using the concept of the tensor, and so we begin this book with a comprehensive chapter on the tensor. The chapter is divided into three parts. The first part covers vectors (§1.1-1.7). The second part is concerned with second, and higher-order, tensors (§1.8-1.15). The second part covers much of the same ground as done in the first part, mainly generalizing the vector concepts and expressions to tensors. The final part (§1.16-1.19) (not required in the vast majority of applications) is concerned with generalizing the earlier work to curvilinear coordinate systems. The first part comprises basic vector algebra, such as the dot product and the cross product; the mathematics of how the components of a vector transform between different coordinate systems; the symbolic, index and matrix notations for vectors; the differentiation of vectors, including the gradient, the divergence and the curl; the integration of vectors, including line, double, surface and volume integrals, and the integral theorems. The second part comprises the definition of the tensor (and a re-definition of the vector); dyads and dyadics; the manipulation of tensors; properties of tensors, such as the trace, transpose, norm, determinant and principal values; special tensors, such as the spherical, identity and orthogonal tensors; the transformation of tensor components between different coordinate systems; the calculus of tensors, including the gradient of vectors and higher order tensors and the divergence of higher order tensors and special fourth order tensors. -
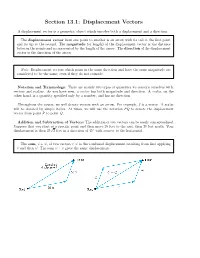
Section 13.1: Displacement Vectors
Section 13.1: Displacement Vectors A displacement vector is a geometric object which encodes both a displacement and a direction. The displacement vector from one point to another is an arrow with its tail at the first point and its tip at the second. The magnitude (or length) of the displacement vector is the distance between the points and is represented by the length of the arrow. The direction of the displacement vector is the direction of the arrow. Note: Displacement vectors which point in the same direction and have the same magnitude are considered to be the same, even if they do not coincide. Notation and Terminology: There are mainly two types of quantities we concern ourselves with: vectors and scalars. As you have seen, a vector has both magnitude and direction. A scalar, on the other hand, is a quantity specified only by a number, and has no direction. Throughout the course, we will denote vectors with an arrow. For example, ~v is a vector. A scalar will be denoted by simple italics. At times, we will use the notation PQ~ to denote the displacement vector from point P to point Q. Addition and Subtraction of Vectors: The addition of two vectors can be easily conceptualized. Suppose that you startp at a specific point and then move 25 feet to the east, then 25 feet north. Your displacement is then 25 2 feet in a direction of 45◦ with respect to the horizontal. The sum, ~v + ~w, of two vectors ~v~w is the combined displacement resulting from first applying ~v and then ~w. -

Clifford Algebra with Mathematica
Clifford Algebra with Mathematica J.L. ARAGON´ G. ARAGON-CAMARASA Universidad Nacional Aut´onoma de M´exico University of Glasgow Centro de F´ısica Aplicada School of Computing Science y Tecnolog´ıa Avanzada Sir Alwyn William Building, Apartado Postal 1-1010, 76000 Quer´etaro Glasgow, G12 8QQ Scotland MEXICO UNITED KINGDOM [email protected] [email protected] G. ARAGON-GONZ´ ALEZ´ M.A. RODRIGUEZ-ANDRADE´ Universidad Aut´onoma Metropolitana Instituto Polit´ecnico Nacional Unidad Azcapotzalco Departamento de Matem´aticas, ESFM San Pablo 180, Colonia Reynosa-Tamaulipas, UP Adolfo L´opez Mateos, 02200 D.F. M´exico Edificio 9. 07300 D.F. M´exico MEXICO MEXICO [email protected] [email protected] Abstract: The Clifford algebra of a n-dimensional Euclidean vector space provides a general language comprising vectors, complex numbers, quaternions, Grassman algebra, Pauli and Dirac matrices. In this work, we present an introduction to the main ideas of Clifford algebra, with the main goal to develop a package for Clifford algebra calculations for the computer algebra program Mathematica.∗ The Clifford algebra package is thus a powerful tool since it allows the manipulation of all Clifford mathematical objects. The package also provides a visualization tool for elements of Clifford Algebra in the 3-dimensional space. clifford.m is available from https://github.com/jlaragonvera/Geometric-Algebra Key–Words: Clifford Algebras, Geometric Algebra, Mathematica Software. 1 Introduction Mathematica, resulting in a package for doing Clif- ford algebra computations. There exists some other The importance of Clifford algebra was recognized packages and specialized programs for doing Clif- for the first time in quantum field theory. -

Section 6.1 Section
Section 6.1 Exercise 10: Find a unit vector u in the direction of the given vector −6 w = 4 . −3 Solution. There are two solutions: √ −6 −6/ 61 ±1 ±1 √ u = w = √ 4 = ± 4/ 61 . kwk 36 + 16 + 9 √ −3 −3/ 61 Exercise 24: Verify the paralellogram law ku + vk2 + ku − vk2 = 2kuk2 + 2kvk2. Solution. Let u = (u1, . , un) and v = (v1, . , vn). We have n n n 2 2 X 2 X 2 X 2 2 2 2 ku + vk + ku − vk = (ui + vi) + (ui − vi) = (2ui + 2vi ) = 2kuk + 2kvk . i=1 i=1 i=1 (Here we used the simple identity (a + b)2 + (a − b)2 = 2a2 + 2b2 valid for any scalars a, b.) Section 6.2 Exercise 30: Let U be orthonormal matrix, and construct V by interchanging some of the rows of U. Explain why V is orthonormal. Solution 1. Let us recall some implications proved in the class. By definition, a matrix U is orthogonal if and only if U T U = I. Since both U and U T are square matrices, the latter identity is equivalent to UU T = I by the Invertible Matrix Theorem. But UU T = I is equivalent to the rows of U being orthonormal. In summary, U is othogonal if and only if its rows are orthonormal. The latter property is clearly preserved by any row permutation. Solution 2 (or rather a hint). Observe that the dot product x · y does not change if the entries of x are permuted in the same way as the entries of y. -

Doing Physics with Quaternions
Doing Physics with Quaternions Douglas B. Sweetser ©2005 doug <[email protected]> All righs reserved. 1 INDEX Introduction 2 What are Quaternions? 3 Unifying Two Views of Events 4 A Brief History of Quaternions Mathematics 6 Multiplying Quaternions the Easy Way 7 Scalars, Vectors, Tensors and All That 11 Inner and Outer Products of Quaternions 13 Quaternion Analysis 23 Topological Properties of Quaternions 28 Quaternion Algebra Tool Set Classical Mechanics 32 Newton’s Second Law 35 Oscillators and Waves 37 Four Tests of for a Conservative Force Special Relativity 40 Rotations and Dilations Create the Lorentz Group 43 An Alternative Algebra for Lorentz Boosts Electromagnetism 48 Classical Electrodynamics 51 Electromagnetic Field Gauges 53 The Maxwell Equations in the Light Gauge: QED? 56 The Lorentz Force 58 The Stress Tensor of the Electromagnetic Field Quantum Mechanics 62 A Complete Inner Product Space with Dirac’s Bracket Notation 67 Multiplying quaternions in Polar Coordinate Form 69 Commutators and the Uncertainty Principle 74 Unifying the Representations of Integral and Half−Integral Spin 79 Deriving A Quaternion Analog to the Schrödinger Equation 83 Introduction to Relativistic Quantum Mechanics 86 Time Reversal Transformations for Intervals Gravity 89 Unified Field Theory by Analogy 101 Einstein’s vision I: Classical unified field equations for gravity and electromagnetism using Riemannian quaternions 115 Einstein’s vision II: A unified force equation with constant velocity profile solutions 123 Strings and Quantum Gravity 127 Answering Prima Facie Questions in Quantum Gravity Using Quaternions 134 Length in Curved Spacetime 136 A New Idea for Metrics 138 The Gravitational Redshift 140 A Brief Summary of Important Laws in Physics Written as Quaternions 155 Conclusions 2 What Are Quaternions? Quaternions are numbers like the real numbers: they can be added, subtracted, multiplied, and divided. -

Introduction to Clifford's Geometric Algebra
SICE Journal of Control, Measurement, and System Integration, Vol. 4, No. 1, pp. 001–011, January 2011 Introduction to Clifford’s Geometric Algebra ∗ Eckhard HITZER Abstract : Geometric algebra was initiated by W.K. Clifford over 130 years ago. It unifies all branchesof physics, and has found rich applications in robotics, signal processing, ray tracing, virtual reality, computer vision, vector field processing, tracking, geographic information systems and neural computing. This tutorial explains the basics of geometric algebra, with concrete examples of the plane, of 3D space, of spacetime, and the popular conformal model. Geometric algebras are ideal to represent geometric transformations in the general framework of Clifford groups (also called versor or Lipschitz groups). Geometric (algebra based) calculus allows, e.g., to optimize learning algorithms of Clifford neurons, etc. Key Words: Hypercomplex algebra, hypercomplex analysis, geometry, science, engineering. 1. Introduction unique associative and multilinear algebra with this property. W.K. Clifford (1845-1879), a young English Goldsmid pro- Thus if we wish to generalize methods from algebra, analysis, ff fessor of applied mathematics at the University College of Lon- calculus, di erential geometry (etc.) of real numbers, complex don, published in 1878 in the American Journal of Mathemat- numbers, and quaternion algebra to vector spaces and multivec- ics Pure and Applied a nine page long paper on Applications of tor spaces (which include additional elements representing 2D Grassmann’s Extensive Algebra. In this paper, the young ge- up to nD subspaces, i.e. plane elements up to hypervolume el- ff nius Clifford, standing on the shoulders of two giants of alge- ements), the study of Cli ord algebras becomes unavoidable.