1 Vectors: Geometric Approach
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
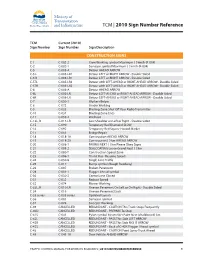
2010 Sign Number Reference for Traffic Control Manual
TCM | 2010 Sign Number Reference TCM Current (2010) Sign Number Sign Number Sign Description CONSTRUCTION SIGNS C-1 C-002-2 Crew Working symbol Maximum ( ) km/h (R-004) C-2 C-002-1 Surveyor symbol Maximum ( ) km/h (R-004) C-5 C-005-A Detour AHEAD ARROW C-5 L C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5 R C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5TL C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-5TR C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6 C-006-A Detour AHEAD ARROW C-6L C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6R C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-7 C-050-1 Workers Below C-8 C-072 Grader Working C-9 C-033 Blasting Zone Shut Off Your Radio Transmitter C-10 C-034 Blasting Zone Ends C-11 C-059-2 Washout C-13L, R C-013-LR Low Shoulder on Left or Right - Double Sided C-15 C-090 Temporary Red Diamond SLOW C-16 C-092 Temporary Red Square Hazard Marker C-17 C-051 Bridge Repair C-18 C-018-1A Construction AHEAD ARROW C-19 C-018-2A Construction ( ) km AHEAD ARROW C-20 C-008-1 PAVING NEXT ( ) km Please Obey Signs C-21 C-008-2 SEALCOATING Loose Gravel Next ( ) km C-22 C-080-T Construction Speed Zone C-23 C-086-1 Thank You - Resume Speed C-24 C-030-8 Single Lane Traffic C-25 C-017 Bump symbol (Rough Roadway) C-26 C-007 Broken Pavement C-28 C-001-1 Flagger Ahead symbol C-30 C-030-2 Centre Lane Closed C-31 C-032 Reduce Speed C-32 C-074 Mower Working C-33L, R C-010-LR Uneven Pavement On Left or On Right - Double Sided C-34 -

Molecular Symmetry
Molecular Symmetry Symmetry helps us understand molecular structure, some chemical properties, and characteristics of physical properties (spectroscopy) – used with group theory to predict vibrational spectra for the identification of molecular shape, and as a tool for understanding electronic structure and bonding. Symmetrical : implies the species possesses a number of indistinguishable configurations. 1 Group Theory : mathematical treatment of symmetry. symmetry operation – an operation performed on an object which leaves it in a configuration that is indistinguishable from, and superimposable on, the original configuration. symmetry elements – the points, lines, or planes to which a symmetry operation is carried out. Element Operation Symbol Identity Identity E Symmetry plane Reflection in the plane σ Inversion center Inversion of a point x,y,z to -x,-y,-z i Proper axis Rotation by (360/n)° Cn 1. Rotation by (360/n)° Improper axis S 2. Reflection in plane perpendicular to rotation axis n Proper axes of rotation (C n) Rotation with respect to a line (axis of rotation). •Cn is a rotation of (360/n)°. •C2 = 180° rotation, C 3 = 120° rotation, C 4 = 90° rotation, C 5 = 72° rotation, C 6 = 60° rotation… •Each rotation brings you to an indistinguishable state from the original. However, rotation by 90° about the same axis does not give back the identical molecule. XeF 4 is square planar. Therefore H 2O does NOT possess It has four different C 2 axes. a C 4 symmetry axis. A C 4 axis out of the page is called the principle axis because it has the largest n . By convention, the principle axis is in the z-direction 2 3 Reflection through a planes of symmetry (mirror plane) If reflection of all parts of a molecule through a plane produced an indistinguishable configuration, the symmetry element is called a mirror plane or plane of symmetry . -

(II) I Main Topics a Rotations Using a Stereonet B
GG303 Lecture 11 9/4/01 1 ROTATIONS (II) I Main Topics A Rotations using a stereonet B Comments on rotations using stereonets and matrices C Uses of rotation in geology (and engineering) II II Rotations using a stereonet A Best uses 1 Rotation axis is vertical 2 Rotation axis is horizontal (e.g., to restore tilted beds) B Construction technique 1 Find orientation of rotation axis 2 Find angle of rotation and rotate pole to plane (or a linear feature) along a small circle perpendicular to the rotation axis. a For a horizontal rotation axis the small circle is vertical b For a vertical rotation axis the small circle is horizontal 3 WARNING: DON'T rotate a plane by rotating its dip direction vector; this doesn't work (see handout) IIIComments on rotations using stereonets and matrices Advantages Disadvantages Stereonets Good for visualization Relatively slow Can bring into field Need good stereonets, paper Matrices Speed and flexibility Computer really required to Good for multiple rotations cut down on errors A General comments about stereonets vs. rotation matrices 1 With stereonets, an object is usually considered to be rotated and the coordinate axes are held fixed. 2 With rotation matrices, an object is usually considered to be held fixed and the coordinate axes are rotated. B To return tilted bedding to horizontal choose a rotation axis that coincides with the direction of strike. The angle of rotation is the negative of the dip of the bedding (right-hand rule! ) if the bedding is to be rotated back to horizontal and positive if the axes are to be rotated to the plane of the tilted bedding. -

Glossary of Linear Algebra Terms
INNER PRODUCT SPACES AND THE GRAM-SCHMIDT PROCESS A. HAVENS 1. The Dot Product and Orthogonality 1.1. Review of the Dot Product. We first recall the notion of the dot product, which gives us a familiar example of an inner product structure on the real vector spaces Rn. This product is connected to the Euclidean geometry of Rn, via lengths and angles measured in Rn. Later, we will introduce inner product spaces in general, and use their structure to define general notions of length and angle on other vector spaces. Definition 1.1. The dot product of real n-vectors in the Euclidean vector space Rn is the scalar product · : Rn × Rn ! R given by the rule n n ! n X X X (u; v) = uiei; viei 7! uivi : i=1 i=1 i n Here BS := (e1;:::; en) is the standard basis of R . With respect to our conventions on basis and matrix multiplication, we may also express the dot product as the matrix-vector product 2 3 v1 6 7 t î ó 6 . 7 u v = u1 : : : un 6 . 7 : 4 5 vn It is a good exercise to verify the following proposition. Proposition 1.1. Let u; v; w 2 Rn be any real n-vectors, and s; t 2 R be any scalars. The Euclidean dot product (u; v) 7! u · v satisfies the following properties. (i:) The dot product is symmetric: u · v = v · u. (ii:) The dot product is bilinear: • (su) · v = s(u · v) = u · (sv), • (u + v) · w = u · w + v · w. -

Euler Quaternions
Four different ways to represent rotation my head is spinning... The space of rotations SO( 3) = {R ∈ R3×3 | RRT = I,det(R) = +1} Special orthogonal group(3): Why det( R ) = ± 1 ? − = − Rotations preserve distance: Rp1 Rp2 p1 p2 Rotations preserve orientation: ( ) × ( ) = ( × ) Rp1 Rp2 R p1 p2 The space of rotations SO( 3) = {R ∈ R3×3 | RRT = I,det(R) = +1} Special orthogonal group(3): Why it’s a group: • Closed under multiplication: if ∈ ( ) then ∈ ( ) R1, R2 SO 3 R1R2 SO 3 • Has an identity: ∃ ∈ ( ) = I SO 3 s.t. IR1 R1 • Has a unique inverse… • Is associative… Why orthogonal: • vectors in matrix are orthogonal Why it’s special: det( R ) = + 1 , NOT det(R) = ±1 Right hand coordinate system Possible rotation representations You need at least three numbers to represent an arbitrary rotation in SO(3) (Euler theorem). Some three-number representations: • ZYZ Euler angles • ZYX Euler angles (roll, pitch, yaw) • Axis angle One four-number representation: • quaternions ZYZ Euler Angles φ = θ rzyz ψ φ − φ cos sin 0 To get from A to B: φ = φ φ Rz ( ) sin cos 0 1. Rotate φ about z axis 0 0 1 θ θ 2. Then rotate θ about y axis cos 0 sin θ = ψ Ry ( ) 0 1 0 3. Then rotate about z axis − sinθ 0 cosθ ψ − ψ cos sin 0 ψ = ψ ψ Rz ( ) sin cos 0 0 0 1 ZYZ Euler Angles φ θ ψ Remember that R z ( ) R y ( ) R z ( ) encode the desired rotation in the pre- rotation reference frame: φ = pre−rotation Rz ( ) Rpost−rotation Therefore, the sequence of rotations is concatentated as follows: (φ θ ψ ) = φ θ ψ Rzyz , , Rz ( )Ry ( )Rz ( ) φ − φ θ θ ψ − ψ cos sin 0 cos 0 sin cos sin 0 (φ θ ψ ) = φ φ ψ ψ Rzyz , , sin cos 0 0 1 0 sin cos 0 0 0 1− sinθ 0 cosθ 0 0 1 − − − cφ cθ cψ sφ sψ cφ cθ sψ sφ cψ cφ sθ (φ θ ψ ) = + − + Rzyz , , sφ cθ cψ cφ sψ sφ cθ sψ cφ cψ sφ sθ − sθ cψ sθ sψ cθ ZYX Euler Angles (roll, pitch, yaw) φ − φ cos sin 0 To get from A to B: φ = φ φ Rz ( ) sin cos 0 1. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Unit 1: Motion
Macomb Intermediate School District High School Science Power Standards Document Physics The Michigan High School Science Content Expectations establish what every student is expected to know and be able to do by the end of high school. They also outline the parameters for receiving high school credit as dictated by state law. To aid teachers and administrators in meeting these expectations the Macomb ISD has undertaken the task of identifying those content expectations which can be considered power standards. The critical characteristics1 for selecting a power standard are: • Endurance – knowledge and skills of value beyond a single test date. • Leverage - knowledge and skills that will be of value in multiple disciplines. • Readiness - knowledge and skills necessary for the next level of learning. The selection of power standards is not intended to relieve teachers of the responsibility for teaching all content expectations. Rather, it gives the school district a common focus and acts as a safety net of standards that all students must learn prior to leaving their current level. The following document utilizes the unit design including the big ideas and real world contexts, as developed in the science companion documents for the Michigan High School Science Content Expectations. 1 Dr. Douglas Reeves, Center for Performance Assessment Unit 1: Motion Big Ideas The motion of an object may be described using a) motion diagrams, b) data, c) graphs, and d) mathematical functions. Conceptual Understandings A comparison can be made of the motion of a person attempting to walk at a constant velocity down a sidewalk to the motion of a person attempting to walk in a straight line with a constant acceleration. -

The Structuring of Pattern Repeats in the Paracas Necropolis Embroideries
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Textile Society of America Symposium Proceedings Textile Society of America 1988 Orientation And Symmetry: The Structuring Of Pattern Repeats In The Paracas Necropolis Embroideries Mary Frame University of British Columbia Follow this and additional works at: https://digitalcommons.unl.edu/tsaconf Part of the Art and Design Commons Frame, Mary, "Orientation And Symmetry: The Structuring Of Pattern Repeats In The Paracas Necropolis Embroideries" (1988). Textile Society of America Symposium Proceedings. 637. https://digitalcommons.unl.edu/tsaconf/637 This Article is brought to you for free and open access by the Textile Society of America at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Textile Society of America Symposium Proceedings by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 136 RESEARCH-IN-PROGRESS REPORT ORIENTATION AND SYMMETRY: THE STRUCTURING OF PATTERN REPEATS IN THE PARACAS NECROPOLIS EMBROIDERIES MARY FRAME RESEARCH ASSOCIATE, INSTITUTE OF ANDEAN STUDIES 4611 Marine Drive West Vancouver, B.C. V7W 2P1 The most extensive Peruvian fabric remains come from the archeological site of Paracas Necropolis on the South Coast of Peru. Preserved by the dry desert conditions, this cache of 429 mummy bundles, excavated in 1926-27, provides an unparal- leled opportunity for comparing the range and nature of varia- tions in similar fabrics which are securely related in time and space. The bundles are thought to span the time period from 500-200 B.C. The most numerous and notable fabrics are embroideries: garments that have been classified as mantles, tunics, wrap- around skirts, loincloths, turbans and ponchos. -

Rotation Matrix - Wikipedia, the Free Encyclopedia Page 1 of 22
Rotation matrix - Wikipedia, the free encyclopedia Page 1 of 22 Rotation matrix From Wikipedia, the free encyclopedia In linear algebra, a rotation matrix is a matrix that is used to perform a rotation in Euclidean space. For example the matrix rotates points in the xy -Cartesian plane counterclockwise through an angle θ about the origin of the Cartesian coordinate system. To perform the rotation, the position of each point must be represented by a column vector v, containing the coordinates of the point. A rotated vector is obtained by using the matrix multiplication Rv (see below for details). In two and three dimensions, rotation matrices are among the simplest algebraic descriptions of rotations, and are used extensively for computations in geometry, physics, and computer graphics. Though most applications involve rotations in two or three dimensions, rotation matrices can be defined for n-dimensional space. Rotation matrices are always square, with real entries. Algebraically, a rotation matrix in n-dimensions is a n × n special orthogonal matrix, i.e. an orthogonal matrix whose determinant is 1: . The set of all rotation matrices forms a group, known as the rotation group or the special orthogonal group. It is a subset of the orthogonal group, which includes reflections and consists of all orthogonal matrices with determinant 1 or -1, and of the special linear group, which includes all volume-preserving transformations and consists of matrices with determinant 1. Contents 1 Rotations in two dimensions 1.1 Non-standard orientation -

1 Sets and Set Notation. Definition 1 (Naive Definition of a Set)
LINEAR ALGEBRA MATH 2700.006 SPRING 2013 (COHEN) LECTURE NOTES 1 Sets and Set Notation. Definition 1 (Naive Definition of a Set). A set is any collection of objects, called the elements of that set. We will most often name sets using capital letters, like A, B, X, Y , etc., while the elements of a set will usually be given lower-case letters, like x, y, z, v, etc. Two sets X and Y are called equal if X and Y consist of exactly the same elements. In this case we write X = Y . Example 1 (Examples of Sets). (1) Let X be the collection of all integers greater than or equal to 5 and strictly less than 10. Then X is a set, and we may write: X = f5; 6; 7; 8; 9g The above notation is an example of a set being described explicitly, i.e. just by listing out all of its elements. The set brackets {· · ·} indicate that we are talking about a set and not a number, sequence, or other mathematical object. (2) Let E be the set of all even natural numbers. We may write: E = f0; 2; 4; 6; 8; :::g This is an example of an explicity described set with infinitely many elements. The ellipsis (:::) in the above notation is used somewhat informally, but in this case its meaning, that we should \continue counting forever," is clear from the context. (3) Let Y be the collection of all real numbers greater than or equal to 5 and strictly less than 10. Recalling notation from previous math courses, we may write: Y = [5; 10) This is an example of using interval notation to describe a set. -

The Problem of Exterior Orientation in Photogrammetry
T he Problem of Exterior Orientation in Photogrammetry*t GEORGE H. ROSENFIELD, Data Reduction A nalyst, RCA Service Co., Air Force Missile Test Center, Patrick Air Force Base, Fla. ABSTRACT: Increased interest in Analytical Photogrammetry has focused at tention upon a chaotic situation which complicates research and communication between photogrammetrists. The designation of the orientation parameters in a different manner by almost every investigator has resulted in the need for a universal non-ambiguous system which depicts the actual physical orientation of the photograph. This paper presents a discussion of the basic concepts in volved in the various systems in use, and recommends the adoption of a standard system within the basic framework of the Stockholm resolution of July 1956, concerning the sign convention to be used in Photogrammetry. 1. INTRODUCTION CHAOTIC situation exists within the science of Photogrammetry which complicates A research and communication between photogrammetrists. When the theoretician studies a technical paper, he finds the work unnecessarily laborious until he has first become familiar with the coordinate system, definitions, and rotations employed by the writer. \i\Then the skilled instrument operator sits down to a newstereoplotting instrument he finds the orienta tion procedure unnecessarily difficult until he be comes familiar with the positive direction of the translational and rotational motions. Thus it is that almost every individual has devised his own unique system of designating the exterior orienta tion of the photograph. In order to alleviate these complications, the VIII International Congress for Photogrammetry at Stockholm in July 1956, accepted a resolution on the sign convention to be used in photogrammetry. -

Newton's Second
Newton's Second Law INTRODUCTION Sir Isaac Newton1 put forth many important ideas in his famous book The Principia. His three laws of motion are the best known of these. The first law seems to be at odds with our everyday experience. Newton's first law states that any object at rest that is not acted upon by outside forces will remain at rest, and that any object in motion not acted upon by outside forces will continue its motion in a straight line at a constant velocity. If we roll a ball across the floor, we know that it will eventually come to a stop, seemingly contradicting the First Law. Our experience seems to agree with Aristotle's2 idea, that the \impetus"3 given to the ball is used up as it rolls. But Aristotle was wrong, as is our first impression of the ball's motion. The key is that the ball does experience an outside force, i.e., friction, as it rolls across the floor. This force causes the ball to decelerate (that is, it has a \negative" acceleration). According to Newton's second law an object will accelerate in the direction of the net force. Since the force of friction is opposite to the direction of travel, this acceleration causes the object to slow its forward motion, and eventually stop. The purpose of this laboratory exercise is to verify Newton's second law. DISCUSSION OF PRINCIPLES Newton's second law in vector form is X F~ = m~a or F~net = m~a (1) This force causes the ball rolling on the floor to decelerate (that is, it has a \negative" accelera- tion).