On the Center Problem for Ordinary Differential Equations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Stanisław Zaremba
Danuta Ciesielska*, Krzysztof Ciesielski** Instytut Historii Nauki im. L. i A. Birkenmajerów, PAN Warszawa Instytut Matematyki, Wydział Matematyki i Informatyki, UJ Kraków SSW B (1–192) O DLO K KRTKIE PRZEDSTAWIENIE POLSKIEJ I KRAKOWSKIEJ MATEMATYKI DO POCZTKW XX WIEKU Znaczący rozwój matematyki na świecie datuje się na drugą połowę drugiego tysiąclecia n.e.; przez poprzedzające go półtora tysiąclecia uzyskiwane wyniki były skromne w porównaniu z tym, co uzyskano później. Jednakże do początku XX wieku Polska była z dala od europejskiej, a tym bardziej światowej czołówki. Potęgami ma- tematycznymi były Francja i Niemcy. Ważne rezultaty osiągano w Wielkiej Brytanii i we Włoszech. Sporadycznie pojawiali się słynni matematycy także w innych krajach, jednak w podręcznikach historii matematyki trudno znaleźć wśród nich Polaków. Od XIV wieku Polska miała się czym poszczycić naukowo. Akademia Krakow- ska była drugim uniwersytetem powstałym w środkowej Europie, od początku wy- kładano tu przedmioty kojarzone z matematyką. Na początku XV wieku krakowski mieszczanin Jan Stobner ufundował specjalną katedrę matematyki i astronomii; druga katedra związana z matematyką została ufundowana przez Marcina Króla z Żurawi- cy (ok.1422–ok.1460), pół wieku później. Był to jednak okres istotnie poprzedzający czasy większych osiągnięć matematycznych. Pewne osiągnięcia matematyczne miał ponad wiek później Mikołaj Kopernik (1473–1543), jego nazwisko kojarzone jest jed- nak (oczywiście słusznie) głównie z astronomią. Dopiero w XVII wieku pojawił się w Krakowie matematyk europejskiego formatu – Joannes Broscius (1585–1652; Jan Brożek, znany też jako Brzozek). Był nie tylko mate- matykiem, ale też flozofem, astronomem, teologiem, lekarzem i historykiem nauki. Ma on na swoim koncie znaczące osiągnięcia, głównie związane są z teorią liczb. -

Fundamental Theorems in Mathematics
SOME FUNDAMENTAL THEOREMS IN MATHEMATICS OLIVER KNILL Abstract. An expository hitchhikers guide to some theorems in mathematics. Criteria for the current list of 243 theorems are whether the result can be formulated elegantly, whether it is beautiful or useful and whether it could serve as a guide [6] without leading to panic. The order is not a ranking but ordered along a time-line when things were writ- ten down. Since [556] stated “a mathematical theorem only becomes beautiful if presented as a crown jewel within a context" we try sometimes to give some context. Of course, any such list of theorems is a matter of personal preferences, taste and limitations. The num- ber of theorems is arbitrary, the initial obvious goal was 42 but that number got eventually surpassed as it is hard to stop, once started. As a compensation, there are 42 “tweetable" theorems with included proofs. More comments on the choice of the theorems is included in an epilogue. For literature on general mathematics, see [193, 189, 29, 235, 254, 619, 412, 138], for history [217, 625, 376, 73, 46, 208, 379, 365, 690, 113, 618, 79, 259, 341], for popular, beautiful or elegant things [12, 529, 201, 182, 17, 672, 673, 44, 204, 190, 245, 446, 616, 303, 201, 2, 127, 146, 128, 502, 261, 172]. For comprehensive overviews in large parts of math- ematics, [74, 165, 166, 51, 593] or predictions on developments [47]. For reflections about mathematics in general [145, 455, 45, 306, 439, 99, 561]. Encyclopedic source examples are [188, 705, 670, 102, 192, 152, 221, 191, 111, 635]. -

The Project Gutenberg Ebook #31061: a History of Mathematics
The Project Gutenberg EBook of A History of Mathematics, by Florian Cajori This eBook is for the use of anyone anywhere at no cost and with almost no restrictions whatsoever. You may copy it, give it away or re-use it under the terms of the Project Gutenberg License included with this eBook or online at www.gutenberg.org Title: A History of Mathematics Author: Florian Cajori Release Date: January 24, 2010 [EBook #31061] Language: English Character set encoding: ISO-8859-1 *** START OF THIS PROJECT GUTENBERG EBOOK A HISTORY OF MATHEMATICS *** Produced by Andrew D. Hwang, Peter Vachuska, Carl Hudkins and the Online Distributed Proofreading Team at http://www.pgdp.net transcriber's note Figures may have been moved with respect to the surrounding text. Minor typographical corrections and presentational changes have been made without comment. This PDF file is formatted for screen viewing, but may be easily formatted for printing. Please consult the preamble of the LATEX source file for instructions. A HISTORY OF MATHEMATICS A HISTORY OF MATHEMATICS BY FLORIAN CAJORI, Ph.D. Formerly Professor of Applied Mathematics in the Tulane University of Louisiana; now Professor of Physics in Colorado College \I am sure that no subject loses more than mathematics by any attempt to dissociate it from its history."|J. W. L. Glaisher New York THE MACMILLAN COMPANY LONDON: MACMILLAN & CO., Ltd. 1909 All rights reserved Copyright, 1893, By MACMILLAN AND CO. Set up and electrotyped January, 1894. Reprinted March, 1895; October, 1897; November, 1901; January, 1906; July, 1909. Norwood Pre&: J. S. Cushing & Co.|Berwick & Smith. -

The Exact Sciences Michel Paty
The Exact Sciences Michel Paty To cite this version: Michel Paty. The Exact Sciences. Kritzman, Lawrence. The Columbia History of Twentieth Century French Thought, Columbia University Press, New York, p. 205-212, 2006. halshs-00182767 HAL Id: halshs-00182767 https://halshs.archives-ouvertes.fr/halshs-00182767 Submitted on 27 Oct 2007 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. 1 The Exact Sciences (Translated from french by Malcolm DeBevoise), in Kritzman, Lawrence (eds.), The Columbia History of Twentieth Century French Thought, Columbia University Press, New York, 2006, p. 205-212. The Exact Sciences Michel Paty Three periods may be distinguished in the development of scientific research and teaching in France during the twentieth century: the years prior to 1914; the interwar period; and the balance of the century, from 1945. Despite the very different circumstances that prevailed during these periods, a certain structural continuity has persisted until the present day and given the development of the exact sciences in France its distinctive character. The current system of schools and universitiespublic, secular, free, and open to all on the basis of meritwas devised by the Third Republic as a means of satisfying the fundamental condition of a modern democracy: the education of its citizens and the training of elites. -

Catalogue 176
C A T A L O G U E – 1 7 6 JEFF WEBER RARE BOOKS Catalogue 176 Revolutions in Science THE CURRENT catalogue continues the alphabet started with cat. #174. Lots of new books are being offered here, including books on astronomy, mathematics, and related fields. While there are many inexpensive books offered there are also a few special pieces, highlighted with the extraordinary LUBIENIECKI, this copy being entirely handcolored in a contemporary hand. Among the books are the mathematic libraries of Dr. Harold Levine of Stanford University and Father Barnabas Hughes of the Franciscan order in California. Additional material is offered from the libraries of David Lindberg and L. Pearce Williams. Normally I highlight the books being offered, but today’s bookselling world is changing rapidly. Many books are only sold on-line and thus many retailers have become abscent from city streets. If they stay in the trade, they deal on-line. I have come from a tradition of old style bookselling and hope to continue binging fine books available at reasonable prices as I have in the past. I have been blessed with being able to represent many collections over the years. No one could predict where we are all now today. What is your view of today’s book world? How can I serve you better? Let me know. www.WeberRareBooks.com On the site are more than 10,000 antiquarian books in the fields of science, medicine, Americana, classics, books on books and fore-edge paintings. The books in current catalogues are not listed on-line until mail-order clients have priority. -

Rudi Mathematici
Rudi Mathematici 4 3 2 x -8176x +25065656x -34150792256x+17446960811280=0 Rudi Mathematici January 1 1 M (1803) Guglielmo LIBRI Carucci dalla Somaja (1878) Agner Krarup ERLANG (1894) Satyendranath BOSE 18º USAMO (1989) - 5 (1912) Boris GNEDENKO 2 M (1822) Rudolf Julius Emmanuel CLAUSIUS Let u and v real numbers such that: (1905) Lev Genrichovich SHNIRELMAN (1938) Anatoly SAMOILENKO 8 i 9 3 G (1917) Yuri Alexeievich MITROPOLSHY u +10 ∗u = (1643) Isaac NEWTON i=1 4 V 5 S (1838) Marie Ennemond Camille JORDAN 10 (1871) Federigo ENRIQUES = vi +10 ∗ v11 = 8 (1871) Gino FANO = 6 D (1807) Jozeph Mitza PETZVAL i 1 (1841) Rudolf STURM Determine -with proof- which of the two numbers 2 7 M (1871) Felix Edouard Justin Emile BOREL (1907) Raymond Edward Alan Christopher PALEY -u or v- is larger (1888) Richard COURANT 8 T There are only two types of people in the world: (1924) Paul Moritz COHN (1942) Stephen William HAWKING those that don't do math and those that take care of them. 9 W (1864) Vladimir Adreievich STELKOV 10 T (1875) Issai SCHUR (1905) Ruth MOUFANG A mathematician confided 11 F (1545) Guidobaldo DEL MONTE That a Moebius strip is one-sided (1707) Vincenzo RICCATI You' get quite a laugh (1734) Achille Pierre Dionis DU SEJOUR If you cut it in half, 12 S (1906) Kurt August HIRSCH For it stay in one piece when divided. 13 S (1864) Wilhelm Karl Werner Otto Fritz Franz WIEN (1876) Luther Pfahler EISENHART (1876) Erhard SCHMIDT A mathematician's reputation rests on the number 3 14 M (1902) Alfred TARSKI of bad proofs he has given. -
A Calendar of Mathematical Dates January
A CALENDAR OF MATHEMATICAL DATES V. Frederick Rickey Department of Mathematical Sciences United States Military Academy West Point, NY 10996-1786 USA Email: fred-rickey @ usma.edu JANUARY 1 January 4713 B.C. This is Julian day 1 and begins at noon Greenwich or Universal Time (U.T.). It provides a convenient way to keep track of the number of days between events. Noon, January 1, 1984, begins Julian Day 2,445,336. For the use of the Chinese remainder theorem in determining this date, see American Journal of Physics, 49(1981), 658{661. 46 B.C. The first day of the first year of the Julian calendar. It remained in effect until October 4, 1582. The previous year, \the last year of confusion," was the longest year on record|it contained 445 days. [Encyclopedia Brittanica, 13th edition, vol. 4, p. 990] 1618 La Salle's expedition reached the present site of Peoria, Illinois, birthplace of the author of this calendar. 1800 Cauchy's father was elected Secretary of the Senate in France. The young Cauchy used a corner of his father's office in Luxembourg Palace for his own desk. LaGrange and Laplace frequently stopped in on business and so took an interest in the boys mathematical talent. One day, in the presence of numerous dignitaries, Lagrange pointed to the young Cauchy and said \You see that little young man? Well! He will supplant all of us in so far as we are mathematicians." [E. T. Bell, Men of Mathematics, p. 274] 1801 Giuseppe Piazzi (1746{1826) discovered the first asteroid, Ceres, but lost it in the sun 41 days later, after only a few observations. -
Mathematicians Timeline
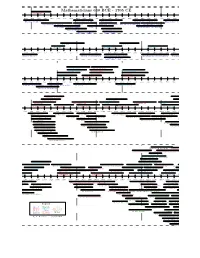
Rikitar¯oFujisawa Otto Hesse Kunihiko Kodaira Friedrich Shottky Viktor Bunyakovsky Pavel Aleksandrov Hermann Schwarz Mikhail Ostrogradsky Alexey Krylov Heinrich Martin Weber Nikolai Lobachevsky David Hilbert Paul Bachmann Felix Klein Rudolf Lipschitz Gottlob Frege G Perelman Elwin Bruno Christoffel Max Noether Sergei Novikov Heinrich Eduard Heine Paul Bernays Richard Dedekind Yuri Manin Carl Borchardt Ivan Lappo-Danilevskii Georg F B Riemann Emmy Noether Vladimir Arnold Sergey Bernstein Gotthold Eisenstein Edmund Landau Issai Schur Leoplod Kronecker Paul Halmos Hermann Minkowski Hermann von Helmholtz Paul Erd}os Rikitar¯oFujisawa Otto Hesse Kunihiko Kodaira Vladimir Steklov Karl Weierstrass Kurt G¨odel Friedrich Shottky Viktor Bunyakovsky Pavel Aleksandrov Andrei Markov Ernst Eduard Kummer Alexander Grothendieck Hermann Schwarz Mikhail Ostrogradsky Alexey Krylov Sofia Kovalevskya Andrey Kolmogorov Moritz Stern Friedrich Hirzebruch Heinrich Martin Weber Nikolai Lobachevsky David Hilbert Georg Cantor Carl Goldschmidt Ferdinand von Lindemann Paul Bachmann Felix Klein Pafnuti Chebyshev Oscar Zariski Carl Gustav Jacobi F Georg Frobenius Peter Lax Rudolf Lipschitz Gottlob Frege G Perelman Solomon Lefschetz Julius Pl¨ucker Hermann Weyl Elwin Bruno Christoffel Max Noether Sergei Novikov Karl von Staudt Eugene Wigner Martin Ohm Emil Artin Heinrich Eduard Heine Paul Bernays Richard Dedekind Yuri Manin 1820 1840 1860 1880 1900 1920 1940 1960 1980 2000 Carl Borchardt Ivan Lappo-Danilevskii Georg F B Riemann Emmy Noether Vladimir Arnold August Ferdinand -

Universidad Nacional Mayor De San Marcos Universidad Del Perú
Universidad Nacional Mayor de San Marcos Universidad del Perú. Decana de América Facultad de Ciencias Matemáticas Escuela Profesional de Matemática El teorema de Darboux para formas simplécticas TESIS Para optar el Título Profesional de Licenciado en Matemática AUTOR Charles Edgar LÓPEZ VEREAU ASESOR Yolanda Silvia SANTIAGO AYALA Lima, Perú 2018 UNIVERSIDAD NACIONAL MAYOR DE SAN MARCOS (llniversidad delperú 0E[ANA I]E AMÉIlI[A) FACULTAD DE CIENCIAS MATEMATICAS Ciuriad llniversitaria - Av. Venezuela S/N cuadra 34 T¡lÉfono: 6l$-700ú. A¡exo lEl0 Iorreo Posta[ [5-0021. E-mail: eapmatEunmsm.edu.pe Lima - Perú Escuela Prof'esional de Matemática ACTA DE SUSTENTACIÓN DE TESIS PARA OPTAR EL TÍTULO PROFESIONAL DE I-ICENCIADO EN MA I'IT]MÁT'ICA En la UNMSM - Ciudad Universitaria - Facultad cle Ciencias Matemáticas. siendo Ias ...r14.:.t.0. hor¿rs del .lueves 6 cle diciellble de 2018. se ¡eunieron los docentes designaclos como Miembros del .Iuraclo Evaluador de Tesis: Mg. Sarfiago César Rojas Romero (PRESTDENTE), Mg. .losué Alorrso Agr"rirre Enciso (MtEMBno). Dra. Yolanda Silvia Sanfiago Ayala (Miel.rnno AsESoR), para la sustentación de la tesis titulada: «EL TEoREMA DÉ DARBoux IARA FoRMAS stMplÉclcAS», presentado por el señor Baohiller CHARLES EDCAR LópEz Vens,qu. para optar el Título I,r'olesional de Licenciado en Matemática. Luego de la exposición del tesista. el Ptesidente del .lurado invitó a dar respuestas a las preguntas que le formulen. Hecha la evaluación cort espondiente por los Mienrbros del .lulac1o. el tesista mereció la aprobación un¡inimc ol¡teniendo comrr calil.rc¿ili'o ¡l.onteclio la nota cle: t.99.r.r3.!t.§Ug ......< ,l"l ¡ J.5.<¡"lierüe C*n vnenülvt A continr"ración. -

Georg Wilhelm Friedrich Hegel Martin Heidegger John Dewey Karl Marx
T hales Xenophanes Heraclitus Donaldson Brown Leucippus Anaximander Parmenides Anaxagoras Peter Drucker Democritus Pythagoras Protagoras Zeno of Elea Socrates Isaiah Epicurus Plato Hippocrates Aeschylus Pericles Antisthenes Jeremiah Aristotle Zeno of Citium Herophilos Marsilio Ficino T hucydides Sophocles Zoroaster Jesus Gautama Buddha Roger Bacon Alexander the Great Ammonius Saccas Erasistratus Euripides Paul of T arsus Mani Nagarjuna Ashoka Plotinus Al-Farabi Origen Galen Aristophanes Asclepiades of Bithynia Constantine I Albertus Magnus Augustine of Hippo Lucretius Cleanthes Avicenna Muhammad Martin Luther Johannes Scotus Eriugena Anicius Manlius Severinus Boethius Chrysippus Virgil Averroes Fakhr al-Din al-Razi Lorenzo de' Medici Desiderius Erasmus Sextus Empiricus Porphyry Anselm of Canterbury Henry of Ghent T homas Aquinas Cicero Seneca the Younger Horace Ovid Ibn Khaldun Giovanni Pico della Mirandola Menander Donatello T homas More Duns Scotus Lorenzo Valla Michel de Montaigne Petrarch Geoffrey Chaucer Poliziano Plutarch T homas Kyd Christopher Marlowe Girolamo Benivieni T erence Girolamo Savonarola Plautus Pierre Corneille Jean Racine William of Ockham William Shakespeare Moliere Hugo Grotius Francis Bacon Rene Descartes Ptolemy Euclid Al-Karaji Ben Jonson Alfred T ennyson, 1st Baron T ennyson T homas Hardy Homer Karen Blixen Paul Scarron T homas Hobbes Robert Boyle Abd Al-Rahman Al Sufi Muhammad ibn Musa al-Khwarizmi Nicolaus Copernicus T itian Blaise Pascal Dante Alighieri Peter Hoeg Baruch Spinoza Galileo Galilei Marin Mersenne -

Prof. Gaston Darboux, For. Mem. RS
NATURE [MARCH 8, 1917 inferior quality. The more the situation is con tained a "Sur les surfaces orthogonales " sidered, the more imperative appears the need to as a theSIS at the Sorbonne for the doctorate in cultivate every rod of fertile ground. Unless the He then plunged into omens are false, and whether peace come soon or teachmg, .to he had been looking forward, no, all the vegetable produce that can be raised collaboratmg WIth Joseph Bertrand in mathemati wiII be sorely needed. F. K. cal physics at the College de France and with Bouquet at the Lycee Louis Ie Grand' 'but he also found. time to ela?orate. two of his principal PROF. GASTON DARBOUX, For. Mem. R.S. memOIrs, both publIshed m 1870, one on partial BY the recent death of the permanent secre- differential equations of the second order, the tary of the Academy of Sciences of the other the famous tI'eatise, "Sur une classe Institute of France, mathematical science, and all remarquable des courbes et des surfaces that it stands for in the evolution of human pro algebriques." In. the latter work was developed gress, has suffered a grievous loss. Of dark the .theory of cyclIdes,. so named after the special complexion and large build, which were a con surface of Dupm, a study which had been tinual reminder of his southern Provencal origin, InItIated by Moutard and envisaged under more and of the exquisite courtesy which marks the general forms by Kummer. The Irish mathe French man of learning at his best, Prof. matician Casey published abDut the same time Darboux was no stranger in this country. -

Formulations of General Relativity
Formulations of General Relativity Gravity, Spinors and Differential Forms Kirill Krasnov To the memory of two Peter Ivanovichs in my life: Peter Ivanovich Fomin, who got me interested in gravity, and Peter Ivanovich Holod, who formed my taste for mathematics. Contents Preface page x 0 Introduction 1 1 Aspects of Differential Geometry 9 1.1 Manifolds 9 1.2 Differential Forms 13 1.3 Integration of differential forms 19 1.4 Vector fields 22 1.5 Tensors 27 1.6 Lie derivative 30 1.7 Integrability conditions 35 1.8 The metric 36 1.9 Lie groups and Lie algebras 40 1.10 Cartan’s isomorphisms 52 1.11 Fibre bundles 54 1.12 Principal bundles 58 1.13 Hopf fibration 65 1.14 Vector bundles 69 1.15 Riemannian Geometry 75 1.16 Spinors and Differential Forms 77 2 Metric and Related Formulations 83 2.1 Einstein-Hilbert metric formulation 83 2.2 Gamma-Gamma formulation 85 2.3 Linearisation 89 2.4 First order Palatini formulation 92 2.5 Eddington-Schrodinger¨ affine formulation 93 2.6 Unification: Kaluza-Klein theory 94 viii Contents 3 Cartan’s Tetrad Formulation 95 3.1 Tetrad, Spin connection 97 3.2 Einstein-Cartan first order formulation 110 3.3 Teleparallel formulation 112 3.4 Pure connection formulation 114 3.5 MacDowell-Mansouri formulation 116 3.6 Dimensional reduction 119 3.7 BF formulation 121 4 General Relativity in 2+1 Dimensions 133 4.1 Einstein-Cartan and Chern-Simons formulations 133 4.2 The pure connection formulation 137 5 The ”Chiral” Formulation of General Relativity 140 5.1 Hodge star and self-duality in four dimensions 141 5.2 Decomposition