MIURA 1 Avionics Development and Qualification
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RAÚL TORRES, CEO and Co-Founder of PLD Space
RAÚL TORRES, CEO and co-founder of PLD Space Raúl Torres, a 33-year-old Spanish businessman, is CEO and co-founder of PLD Space, the Spanish launcher company that will provide scientific and commercial access to space for small satellites and payloads. Raúl has a degree in Biological Sciences from the University of Alicante and has studies in Aerospace Engineering from the Polytechnic University of Valencia. In 2011, Raúl Torres founded, together with Raúl Verdú, PLD Space. The company closed its first initial investment round in 2013, with an investment of 1 million euros and with the participation of Business Angels and public institutions (CDTI). At the end of 2015, the Spanish Science Association honored both co-founders for their achievements in the field of space propulsion; PLD Space developed from scratch and tested in its private facilities, located at the Teruel airport, the first reusable liquid rocket engine in Europe fully dedicated to driving the small satellite industry. At the end of 2016, PLD Space closed a series A1 investment round of more than 6 million euros between public and private investment and with the corporate backing of the Spanish space company GMV as a technical investor and shareholder. In May 2018, PLD Space raised an investment round of 10 million euros with the participation of new investors such as the Spanish aeronautical firm ACITURRI and the venture capital fund JME, from José Manuel Entrecanales, CEO of Acciona. In April 2019, the recovery test of a demonstrator of the first stage of the MIURA 5 orbital launcher was carried out, in which the Army collaborated with the support from a Chinook helicopter. -

Revista De Aeronáutica Y Astronáutica, 902, Mayo 2021
NÚM. 902 2021 MAYO DOSIER: SEGURIDAD Y DEFENSA AEROESPACIAL Destacamento PAZNIC 00 Portada MAYO 2021.indd 1 14/4/21 11:17 CIEN AÑOS DEL CUARTEL «INFANTE Cien años del Cuartel «Infante Don Juan» DON JUAN» PATRIMONIO HISTÓRICO, Patrimonio histórico, artístico ARTÍSTICO Y DOCUMENTAL y documental prototípico PROTOTÍPICO Autor: Dirección de Asistencia al Personal del Ejército de Tierra 78 páginas Edición electrónica gratuita NIPO: 083-21-014-1 La Legión LA LEGIÓN 100 AÑOS, 100 IMÁGENES 100 años,100 imágenes Autor: Varios autores 1920 2020 342 páginas 25,00 euros ISBN: 978-84-9091-513-4 MINISTERIO DE DEFENSA USOS MILITARES DE LA INTELIGENCIA ARTIFICIAL, LA AUTOMATIZACIÓN Y LA ROBÓTICA (IAA&R) Autor: Centro Conjunto de Desarrollo de Conceptos Centro Usos militares de la inteligencia Conjunto de artificial, la automatización y la Desarrollo de Conceptos robótica (IAA&R) 180 páginas Edición electrónica gratuita Impresión bajo demanda: 10,00€ NIPO: 083-20-043-7 MINISTERIO DE DEFENSA DESVELANDO HORIZONTES. OBRA COMPLETA (3 VOLÚMENES) Autor: Varios autores 2292 páginas 75,00 euros NOVEDADES EDITORIALES NOVEDADES https://publicaciones.defensa.gob.es/ 256 nov editoriales.indd 736 25/3/21 7:41 revista de aeronáutica y astronáutica 355 NORMAS DE COLABORACIÓN Las colaboraciones con la Revista de Aeronáutica y Astronáutica se realizarán teniendo en cuenta las siguientes instrucciones: Director: • Los artículos deben tener relación, preferentemente, con temas de actualidad Coronel: Raúl M. Calvo Ballesteros [email protected] relacionados con la aeronáutica y el espacio, el Ejército del Aire y sus unidades, las Fuerzas Armadas en general y todos aquellos cuyo contenido sea conside- Consejo de Redacción: rado de interés por el consejo de redacción. -

Ficha España Maquetación 1 22/04/2020 16:45 Página 141
ficha españa_Maquetación 1 22/04/2020 16:45 Página 141 El Ejército del Aire cuenta ya con 7 aviones Airbus DS A400M (foto Julio Maíz). Presupuestos generales de Defensa SISTEMAS AÉREOS • El Consejo de Ministros autorizaba en diciembre de 2018 la modernización de la flota de los cazabombarderos Eurofighter Los últimos presupuestos para el Ministerio de Defensa (MD) para del Ejército del Aire por un importe de 1.030 millones de USD. el ejercicio 2019 presentados por el Gobierno socialista ascendían a Los trabajos está previsto que los realice Airbus Defence and 10.079 millones de millones de USD (moneda en que se darán todas Space (DS) en su planta de Getafe (Madrid). las cifras), teóricamente un 1,5% más que en 2018, que fueron de 9.934 millones. Aunque finalmente al no llegar a aprobarse las cuentas públicas, quedaron sin efecto, prologándose los de 2018 Planificación de compras y contratos realizados por el partido de centro-derecha PP. La propuesta incluía la partida destinada a la financiación del Centro Nacional de SISTEMAS TERRESTRES Inteligencia (CNI), que es de 337 millones, que antes dependía y su • Está en marcha el programa para reequipar al ET con un moder- presupuesto estaba asignado al Ministerio de Presidencia. Los no vehículo blindado 8x8, que sustituirá a los BMR M1, que a importantes gastos de la inteligencia española se habrían incremen- finales de 2019 la Dirección General de Armamento y Material tado en un 4,8%, respecto a los 321 millones que se le asignaron en (DGAM) se declaró desierto. Actualmente se contempla ya la 2018. -
2019 Nano/Microsatellite Market Forecast, 9Th Edition
2019 NANO/MICROSATELLITE MARKET FORECAST, 9TH EDITION Copyright 2018, SpaceWorks Enterprises, Inc. (SEI) APPROVED FOR PUBLIC RELEASE. SPACEWORKS ENTERPRISES, INC., COPYRIGHT 2018. 1 Since 2008, SpaceWorks has actively monitored companies and economic activity across both the satellite and launch sectors 0 - 50 kg 50 - 250kg 250 - 1000kg 1000 - 2000kg 2000kg+ Custom market assessments are available for all mass classes NANO/MICROSATELLITE DEFINITION Picosatellite Nanosatellite Microsatellite Small/Medium Satellite (0.1 – 0.99 kg) (1 – 10 kg) (10 – 100 kg) (100 – 1000 kg) 0 kg 1 kg 10 kg 100 kg 1000 kg This report bounds the upper range of interest in microsatellites at 50 kg given the relatively large amount of satellite development activity in the 1 – 50 kg range FORECASTING METHODOLOGY SpaceWorks’ proprietary Launch Demand Database (LDDB) Downstream serves as the data source for all satellite market Demand assessments ▪ Planned The LDDB is a catalogue of over 10,000+ historical and Constellations future satellites containing both public and non-public (LDDB) satellite programs Launch Supply SpaceWorks newly updated Probabilistic Forecast Model (PFM) is used to generate future market potential SpaceWorks PFM Model ▪ The PFM considers down-stream demand, announced/planed satellite constellations, and supply-side dynamics, among other relevant factors Expert Analysis The team of expert industry analysts at SpaceWorks SpaceWorks further interprets and refines the PFM results to create Forecast accurate market forecasts Methodology at a Glance 2018 SpaceWorks forecasted 2018 nano/microsatellite launches with unprecedented accuracy – actual satellites launched amounted to just 5% below our analysts’ predictions. In line with SpaceWorks’ expectations, the industry corrected after a record launch year in 2017, sending 20% less nano/microsatellites to orbit than in 2018. -
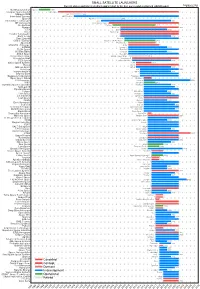
Small Satellite Launchers
SMALL SATELLITE LAUNCHERS NewSpace Index 2020/04/20 Current status and time from development start to the first successful or planned orbital launch NEWSPACE.IM Northrop Grumman Pegasus 1990 Scorpius Space Launch Demi-Sprite ? Makeyev OKB Shtil 1998 Interorbital Systems NEPTUNE N1 ? SpaceX Falcon 1e 2008 Interstellar Technologies Zero 2021 MT Aerospace MTA, WARR, Daneo ? Rocket Lab Electron 2017 Nammo North Star 2020 CTA VLM 2020 Acrux Montenegro ? Frontier Astronautics ? ? Earth to Sky ? 2021 Zero 2 Infinity Bloostar ? CASIC / ExPace Kuaizhou-1A (Fei Tian 1) 2017 SpaceLS Prometheus-1 ? MISHAAL Aerospace M-OV ? CONAE Tronador II 2020 TLON Space Aventura I ? Rocketcrafters Intrepid-1 2020 ARCA Space Haas 2CA ? Aerojet Rocketdyne SPARK / Super Strypi 2015 Generation Orbit GoLauncher 2 ? PLD Space Miura 5 (Arion 2) 2021 Swiss Space Systems SOAR 2018 Heliaq ALV-2 ? Gilmour Space Eris-S 2021 Roketsan UFS 2023 Independence-X DNLV 2021 Beyond Earth ? ? Bagaveev Corporation Bagaveev ? Open Space Orbital Neutrino I ? LIA Aerospace Procyon 2026 JAXA SS-520-4 2017 Swedish Space Corporation Rainbow 2021 SpinLaunch ? 2022 Pipeline2Space ? ? Perigee Blue Whale 2020 Link Space New Line 1 2021 Lin Industrial Taymyr-1A ? Leaf Space Primo ? Firefly 2020 Exos Aerospace Jaguar ? Cubecab Cab-3A 2022 Celestia Aerospace Space Arrow CM ? bluShift Aerospace Red Dwarf 2022 Black Arrow Black Arrow 2 ? Tranquility Aerospace Devon Two ? Masterra Space MINSAT-2000 2021 LEO Launcher & Logistics ? ? ISRO SSLV (PSLV Light) 2020 Wagner Industries Konshu ? VSAT ? ? VALT -

ESPI Insights Space Sector Watch
ESPI Insights Space Sector Watch Issue 16 May 2021 THIS MONTH IN THE SPACE SECTOR… MARS LANDING CEMENTS CHINA’S POSITION AS MAJOR SPACE POWER ................................................................ 1 POLICY & PROGRAMMES .................................................................................................................................... 2 ESA awards €150 million in contracts to continue development of Prometheus and Phoebus .......... 2 European Commission targets second study for its space-based secure connectivity project .......... 2 South Korea joins Artemis accords and strengthens partnership with the U.S. ..................................... 2 May marks busy month in UK space sector................................................................................................... 3 NASA temporarily suspends SpaceX’s HLS contract following protests on the award ........................ 3 Spain eyes creation of a National Space Agency .......................................................................................... 3 Space Force awards $228 million GPS contract extension to Raytheon Intelligence and Space ...... 4 China officially establishes company to develop and operate broadband mega constellation ........... 4 Lithuania signs Association Agreement with ESA ........................................................................................ 4 CNES and Bundeswehr University Munich (UniBw) launch SpaceFounders accelerator ..................... 4 The Brazilian Space Agency selects Virgin Orbit -

The Annual Compendium of Commercial Space Transportation: 2017
Federal Aviation Administration The Annual Compendium of Commercial Space Transportation: 2017 January 2017 Annual Compendium of Commercial Space Transportation: 2017 i Contents About the FAA Office of Commercial Space Transportation The Federal Aviation Administration’s Office of Commercial Space Transportation (FAA AST) licenses and regulates U.S. commercial space launch and reentry activity, as well as the operation of non-federal launch and reentry sites, as authorized by Executive Order 12465 and Title 51 United States Code, Subtitle V, Chapter 509 (formerly the Commercial Space Launch Act). FAA AST’s mission is to ensure public health and safety and the safety of property while protecting the national security and foreign policy interests of the United States during commercial launch and reentry operations. In addition, FAA AST is directed to encourage, facilitate, and promote commercial space launches and reentries. Additional information concerning commercial space transportation can be found on FAA AST’s website: http://www.faa.gov/go/ast Cover art: Phil Smith, The Tauri Group (2017) Publication produced for FAA AST by The Tauri Group under contract. NOTICE Use of trade names or names of manufacturers in this document does not constitute an official endorsement of such products or manufacturers, either expressed or implied, by the Federal Aviation Administration. ii Annual Compendium of Commercial Space Transportation: 2017 GENERAL CONTENTS Executive Summary 1 Introduction 5 Launch Vehicles 9 Launch and Reentry Sites 21 Payloads 35 2016 Launch Events 39 2017 Annual Commercial Space Transportation Forecast 45 Space Transportation Law and Policy 83 Appendices 89 Orbital Launch Vehicle Fact Sheets 100 iii Contents DETAILED CONTENTS EXECUTIVE SUMMARY . -

Cuadernos De Estrategia 170. El Sector Espacial En España
Cuadernos de Estrategia 170 Instituto Español El sector espacial en España. de Estudios Evolución y perspectivas Estratégicos MINISTERIO DE DEFENSA Cuadernos de Estrategia 170 Instituto Español El sector espacial en España. de Estudios Evolución y perspectivas Estratégicos MINISTERIO DE DEFENSA CATÁLOGO GENERAL DE PUBLICACIONES OFICIALES http://publicacionesoficiales.boe.es/ Edita: SECRETARÍA GENERAL TÉCNICA http://publicaciones.defensa.gob.es/ © Autor y editor, 2014 NIPO: 083-14-236-5 (edición papel) NIPO: 083-14-235-X (edición libro-e) ISBN: 978-84-9091-006-1 (edición papel) ISBN: 978-84-9091-005-4 (edición libro-e) Depósito Legal: M-30595-2014 Fecha de edición: diciembre 2014 Imprime: Imprenta del Ministerio de Defensa Las opiniones emitidas en esta publicación son exclusiva responsabilidad de los autores de la misma. Los derechos de explotación de esta obra están amparados por la Ley de Propiedad Intelectual. Ninguna de las partes de la misma puede ser reproducida, almacenada ni transmitida en ninguna forma ni por medio alguno, electrónico, mecánico o de grabación, incluido fotocopias, o por cual- quier otra forma, sin permiso previo, expreso y por escrito de los titulares del © Copyright. En esta edición se ha utilizado papel 100% reciclado libre de cloro. ÍNDICE Página Introducción Vicente Gómez Domínguez Sinopsis ....................................................................................................................... 15 Resumen de los capítulos ...................................................................................... -

資料2-1 宇宙輸送に係る国外の主要動向について (Pdf:7.8Mb)
2-1 2R2.1.30 2(2020)130 1 1. n l l l 2 1. 1.1 n n l l • • • • • • n l n l • n l 3 1. 1.1 n l l NSSLNational Security Space Launch Evolved Expendable Launch Vehicle (EELV) CRSCommercial Resupply Services CCPCommercial Crew Development DoD:Department of Defense NRO:National Reconnaissance Office A-2. 4 1. 1.1 n l q NASA ⁻ Flight Opportunities(FO) Award(15M) ⁻ Venture Class LaunCh ServiCes(VCLS) RoCket Lab$6.9MVirgin Orbit$4.7M ⁻ SBIR/STTR » SBIR Small Business Innovation ResearCh1 A-15. NASA 20173.2% » STTRSmall Business TeChnology Transfer: 10 20160.45% q DARPA DARPA Launch ChallengeDLC ⁻ 2020 ⁻ VeCtor SpaCeVoX SpaCe3 A-16. DLC 5 1. 1.1 n l l l NASA2015 AFRL 6 1. 1.2 n <>European Space Policy2007 • • ⁻ Ariane 5 ESA Vega SoyuZ ⁻ <>Space Strategy for Europe2016 • autonomousEU ⁻ ⁻ ⁻ EU ⁻ n ESA l Future LaunChers Preparatory Programme (FLPP) 2003 ⁻ 5 ⁻ ⁻ ⁻ ⁻ l FLPP 7 1. 1.3 n 2016(China‘s Space Activities in 2016)5 5/ / (CALT) 2017-2045 2020(LMCZ) 8 2025 2030SR 2040 2045 8 1. 1.4 n l 2030 l l 5 l 2016-2025 • • • • (3) 9 1. 1.5 n l (ISRO)SLVASLVPSLV GSLV, GSLV MkIII l 20192(Department of SpaceDOS) ISRODOS • (Small Satellite Launch Vehicle: SLV) • (Polar SLV) • • n l DOSISRO Semi-CryogeniC ProjeCt 200/ Reusable LaunCh VehiCle - TeChnology Demonstrator (RLV-TD) 2016 India’s Human SpaCe Flight GSLV MkIII2022 10 2. n l l l l l l 11 71.6m -

List of Private Spaceflight Companies - Wikipedia
6/18/2020 List of private spaceflight companies - Wikipedia List of private spaceflight companies This page is a list of non-governmental (privately owned) entities that currently offer—or are planning to offer—equipment and services geared towards spaceflight, both robotic and human. List of abbreviations used in this article Contents Commercial astronauts LEO: Low Earth orbit GTO: Geostationary transfer Manufacturers of space vehicles orbit Cargo transport vehicles VTOL: Vertical take-off and Crew transport vehicles landing Orbital SSTO: Single-stage-to-orbit Suborbital TSTO: Two-stage-to-orbit Launch vehicle manufacturers SSTSO: Single-stage-to-sub- Landers, rovers and orbiters orbit Research craft and tech demonstrators Propulsion manufacturers Satellite launchers Space-based economy Space manufacturing Space mining Space stations Space settlement Spacecraft component developers and manufacturers Spaceliner companies See also References External links Commercial astronauts Association of Spaceflight Professionals[1][2] — Astronaut training, applied research and development, payload testing and integration, mission planning and operations support (Christopher Altman, Soyeon Yi)[1][3] Manufacturers of space vehicles Cargo transport vehicles Dry Launch Return Company Launch Length Payload Diameter Generated Automated Spacecraft mass mass Payload (kg) payload S name system (m) volume (m3) (m) power (W) docking (kg) (kg) (kg) 10.0 (pressurized), 3,310 plus 14 2,500 Falcon 9 pressurized or (unpressurized), Dragon 6.1 4,200[4] 10,200 capsule -

MIURA 5 the European and Reusable Microlauncher for Cubesats and Small Satellites Pablo Gallego, PLD Space, [email protected]
MIURA 5 The European and Reusable Microlauncher for CubeSats and Small Satellites Pablo Gallego, PLD Space, [email protected] PLD Space is the emerging spaceflight company of Europe aiming to PAYLOAD ACCOMMODATION provide affordable, flexible and fast access to space. Currently there are two launch vehicles under development: MIURA 1 and MIURA 5 MIURA 5 is equipped with a lightweight MIURA 1 –asoundingrocket–designedtoprovideaccesstothe carbon composite fairing with a volume big space environment and microgravity. Additionally, it serves as a enough to house a huge variety of possible technology demonstrator and flying test bed for MIURA 5. payload constellations underneath it. A MIURA 5 – a microlauncher – designed for delivering CubeSats and dedicated launch, a piggy-back launch or a small satellites into a low earth orbit. rideshare mission can easily be accommodated. The MIURA 5 payload adapter can support MIURA 5 CHARACTERISTICS almost all commercially available satellite deployment systems and CubeSat MIURA 5 is a two-stage launch vehicle. Its first dispensers. The customer is free to choose stage is propelled by five regeneratively cooled a system that best fits the payload needs. liquid engines which are designed and built in- house by PLD Space. The second stage is Payload Fairing propelled by a single engine of similar design. Nominal Payload 300 kg to 500 km Mass: SSO Vehicle Useable Length: 2.97 m Length: 25 m Useable Diameter: 1.65 m Diameter: 1.8 m Lift-Off Mass: 32.000 kg Stages: 2 + optional kick-stage Propellants: LOX / Kerosene Reusability: First Stage Dedicated Launch Piggy-Back Launch Rideshare Launch First Stage One satellite occupies the A main satellite and multiple Multiple satellites with equal entire payload capacity. -

WALLONIE ESPACE INFOS N 44 Mai-Juin 2009
WALLONIE ESPACE INFOS n°84 janvier-février 2016 WALLONIE ESPACE INFOS n°84 janvier-février 2016 Coordonnées de l’association Wallonie Espace Wallonie Espace WSL, Liege Science Park, Rue des Chasseurs Ardennais, B-4301 Angleur-Liège, Belgique Tel. 32 (0)4 3729329 Skywin Aerospace Cluster of Wallonia Chemin du Stockoy, 3, B-1300 Wavre, Belgique Contact: Michel Stassart, e-mail: [email protected] Le présent bulletin d’infos en format pdf est disponible sur le site de Wallonie Espace (www.wallonie-espace.be), sur le portal de l’Euro Space Center/Belgium, sur le site du pôle Skywin (http://www.skywin.be). SOMMAIRE : Thèmes : articles Mentions Wallonie Espace Page Correctif - Actualité : Sentinel-1B lancé le 22 avril par Soyouz (avec ULg, Thales Alenia Space 2 OUFTI-1) – Agence spatiale interfédérale de Belgique – Vingt ans pour Belgium , Amos, VitroCiset Wallonie Espace – Une Ardéchoise, pilote de CSL Belgium, Gillam, SABCA, Samtech, Sonaca, Spacebel, Techspace Aero, UCL, ULB, ULg, CSL, Euro Space Center, Skywin 1. Politique spatiale/EU + ESA: La « première » 2016 du DG de l’ESA – 5 Tableaux Budgets ESA – Compte-rendu Conférence sur la stratégie spatiale européenne : qui mène la danse dans le couple ESA-Commission européenne ? – A l’heure du Space 4.0 – Intérêt du Grand-Duché pour les ressources dans l’espace – La Corée du Nord exclue de la communauté spatiale ? 2. Accès à l'espace/Arianespace : Interview exclusive d’Alain SABCA, Techspace Aero, Thales 17 Charmeau (Airbus Safran Launchers) – Enquête de la Commission Alenia Space Belgium sur la prise de contrôle d’Arianespace – Duel Arianespace-SpaceX : c’est Ariane 5 qui gagne ! – Débuts, cette année, des lanceurs chinois de nouvelle génération – Tableau mondial des nouveaux lanceurs en préparation (avec des révélations !) WEI n°84 2016-01 - 1 WALLONIE ESPACE INFOS n°84 janvier-février 2016 3.