Drivers of Advances in Mechanized Timber Harvesting – a Selective Review of Technological Innovation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 12 Review
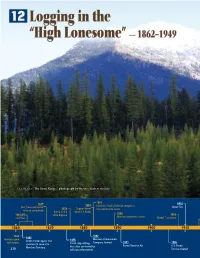
FIGURE 12.1: “The Swan Range,” photograph by Donnie Sexton, no date 1883 1910 1869 1883 First transcontinental Northern Pacifi c Railroad completes Great Fire 1876 Copper boom transcontinental route railroad completed begins in Butte Battle of the 1889 1861–65 Little Bighorn 1908 Civil War Montana becomes a state Model T invented 1860 1870 1880 1890 1900 1910 1862 1882 1862 Montana gold Montana Improvement Anton Holter opens fi rst 1875 rush begins Salish stop setting Company formed 1891 1905 commercial sawmill in Forest Reserve Act U.S. Forest Montana Territory fi res after confrontation 230 with law enforcement Service created READ TO FIND OUT: n How American Indians traditionally used fire n Who controlled Montana’s timber industry n What it was like to work as a lumberjack n When and why fire policy changed The Big Picture For thousands of years people have used forests to fill many different needs. Montana’s forestlands support our economy, our communities, our homes, and our lives. Forests have always been important to life in Montana. Have you ever sat under a tall pine tree, looked up at its branches sweeping the sky, and wondered what was happen- ing when that tree first sprouted? Some trees in Montana are 300 or 400 years old—the oldest living creatures in the state. They rooted before horses came to the Plains. Think of all that has happened within their life spans. Trees and forests are a big part of life in Montana. They support our economy, employ our people, build our homes, protect our rivers, provide habitat for wildlife, influence poli- tics, and give us beautiful places to play and be quiet. -

Things Considered ALL 8-LETTER NOUNS (A Word Used to Identify Any of a Class of People, Places, Or Things) Compiled by Jacob Cohen, Asheville Scrabble Club
All Things Considered ALL 8-LETTER NOUNS (a word used to identify any of a class of people, places, or things) compiled by Jacob Cohen, Asheville Scrabble Club All Noun 8s- B BAALISMS AABILMSS BAALISM, worship of baal [n] BAASKAAP AAAABKPS baaskap (policy of domination by white people in South Africa) [n -S] BAASKAPS AAABKPSS BAASKAP, policy of domination by white people in South Africa [n] BAASSKAP AAABKPSS baaskap (policy of domination by white people in South Africa) [n -S] BABASSUS AABBSSSU BABASSU, palm tree [n] BABBITRY ABBBIRTY conventional middle-class attitudes and behavior stressing respectability and material success [n -RIES] BABBLERS ABBBELRS BABBLER, one that babbles (to talk idly or excessively) [n] BABBLING ABBBGILN idle talk [n -S] BABESIAE AABBEEIS BABESIA, parasitic protozoan [n] (2018) BABESIAS AABBEISS BABESIA, parasitic protozoan [n] BABICHES ABBCEHIS BABICHE, rawhide thongs [n] BABIRUSA AABBIRSU wild pig [n -S] BABOUCHE ABBCEHOU heelless slipper [n -S] BABUSHKA AABBHKSU woman's scarf [n -S] BABYDOLL ABBDLLOY short, sheer pajamas for women [n -S] BABYHOOD ABBDHOOY state of being baby [n -S] BACALAOS AAABCLOS BACALAO, baccala (codfish (marine food fish)) [n] BACALHAU AAABCHLU baccala (codfish (marine food fish)) [n -S] BACCALAS AAABCCLS BACCALA, codfish (marine food fish) [n] BACCARAS AAABCCRS BACCARA, baccarat (card game) [n] BACCARAT AAABCCRT card game [n -S] BACCHANT AABCCHNT carouser (one that carouses (to engage in carousal)) [n -ES, -S] BACCHIUS ABCCHISU type of metrical foot [n -II] BACHELOR ABCEHLOR unmarried -
The Stauffer-Will Farm Volunteer Handbook 2020
The Stauffer-Will Farm Volunteer Handbook 2020 Aurora Colony Stauffer-Will Farm Program 2018 edition ACHS Mission: The mission of the Aurora Colony Historical Society is to “promote interactive lifelong learning by inspiring curiosity about, and preservation of, the heritage of the Aurora Colony. Purpose of the Program: 1. Provide 4th grade students with a hands-on experience of Pioneer life as illustrated in an Aurora Colony family. 2. Relate the Stauffer family's connection to the Colony and the Colony’s goals. 3. Be congruent with Oregon’s School Reform Act of 1991 and its subsequent benchmarks. 4. Provide a positive and safe learning environment for 8 to 11 year old children by allowing them to actively participate in pioneer activities. Goals for volunteers and staff: 1. Volunteer recruitment; attain as many volunteers as possible. 2. Staff the program with volunteers who are dressed in period clothing while they teach children the old Colony ways of making shakes, woodstove cooking, bread making, candle making, wool process, quilt making. 3. Involve the students in activities typical of children’s activities of the time of pioneers and the Aurora Colony. Welcome, and Thank you! The Stauffer-Will Farm School program has been a success for over 30 years. Each year thousands of students and many chaperones attend the farm and village programs. The buildings and the Aurora Colony story come alive with the addition of some very talented and dedicated staff and volunteers. You imbue the participants with enthusiasm about the activities, the Colony and Pioneer history. You add a dimension not found in museums or interpretive centers. -
Magic with a Broadaxe
22 MANUSCRIPTS You must excuse me, Lucretius, for this passionate defence of my poetry. However, I do not understand what all this has to do with the style of my chess-playing." "Well, you see, Wordsworth, I had expected a style of subtle simplicity from you, which would have been in keeping with your poetic style. Instead, your play has contained those very elements that I find lacking in your poetry: immensity and fierceness! Rather than making delicate, quiet moves, you have been relentless in your aggression. This, then, is the contradiction which I have spied." "I dare say," replied Wordsworth, "if you really understood my poetry, you could find no contradiction. Perhaps the light will shine a little more brightly when you see the way in which I intend to finish the game." Lucretius had just played his twenty-fifth move. He sat back in . his chair and waited _for his opponent to make his reply. Words- worth thought for a few moments, then raised his hand to touch the most insignificant piece on the board-the King's Rook's Pawn- which was standing passively and defensively in front of his King, and was still on its original square. He pushed the Pawn forward one square (25 .... P-R3!!), looked across the table, and whis- pered, "Zugzwang !"14 Lucretius looked at the board in silence for a long while. Then he tipped Over his King in Resignation. VVordsworth said mildly, "Perhaps now you can see what I mean when I say, To me the meanest flower that blows can give Thoughts that do often lie too deep for tears.":" Magic With a Broadaxe Edward B. -

I Ill R Rl Tlrll Ell' 111111
I Ill Tlrll ell' 111111 r rlFWSCCC-038 ·I GENERAL SCHEDULE OF SUPPLIES Prepared under direction of the Secretary of the Treasury by the I I I PROCUREMENT DIVISION, BRANCH OF SUPPLY I I Federal Warehouse, Washington, D. C. / CLASS 66.--AIR COMPRESSORS FOR THE PERIOD JUNE 25, 1936 TO JUNE 15, 1937 For use by the executive depart.ents and other establishaents of the Governaent of the United States of Aaerica within the continental liaits of the United States, except Alaska. For use by the Governaent of the District of Coluabia within the District of Coluabia. For use by activities of the Governaent of the District of Coluabia when ordered for delivery other than within the District of Coluabia: Workhouse and Reforaatory, Occoguan, Va. (R. R. Station, Lorton, Va.); Children's Tuberculosis Sanatoriua, Glenn IJRle, Prince Georges County, Hd . (R. R. Station, P. R. R., Glenn IJRle, Md.); D. C. Garbage Reduction Plant, Cherry Hill, Va.; District Training School, Laurel, Hd. (R. R. Station, B. &0. R. R., ~rel , Md). Prices herein include any Federal tax heretofore imposed by the Congress which is applicable to the material awarded. If any sales tax, processing tax , adjustment charge, or other taxes or charges are imposed or changed by the Congress after the date set for the opening of the bid and made applicable directly upon the production, manufacture, or sale of the supplies covered, and are paid by the contractor on the articles or supplies herein contracted for, then the prices named will be increased or decreased accordingly . and any amount due the contractor as a result of such change will be charged to the Government and entered on vouchers (or invoices! as separate items. -

Tool Shed Number 140 February 2006
NUMBER 140 February 2006 A Journal of Tool Collecting published by CRAFTS of New Jersey The Saga of a Hammer By Carl Bopp ( Time line, about 1986) – Years ago after antique some questions about it. I was told, no, he was not shops started renting showcases so dealers didn’t in but they could open the case for me but they had have to spend any or very little floor time, I made no knowledge of the hammer in question. my first purchase from such a case. It was at a large After the hammer was retrieved from the case, I antique shop in Smith- could see that it had ville, (Atlantic County) numbers marked on its N. J. that has since been head and the handle torn down. The show- was some unknown case area was in a long reddish material with a foyer. In one large black inlay trimmed locked case, I spied an with thin brass. Figure unusual hammer. Figure 2 & 3. After getting it 1. It was of a shape that home, I could see the I was not familiar with. numbers were intended Obviously it was not to measure something. intended for heavy duty (Time line, Nov. work. The head was 1989) – Turning to my slim looking and the han- copy of The Hammer dle was at one point very the King of Tools, by slender. The tag with it Ron Baird and Dan said it was a “railroad Comerford, that had hammer”, which I knew just been published, I couldn’t be right because found the same ham- railroad tools are very mer on page 60. -

Absentee Auction, June 16, 2019
THE FINE TOOL JOURNAL Absentee Auction, June 16, 2019 Occasionally, we misnumber a tool in a photo. We try very hard to avoid this, but with so many lots, it does happen. In all cases, the written description will prevail. Tools are sold by description and not photo numbers. 6804-001 SHAPLEIGH Diamond Edge store display. 15” x 9-1/2” x 3-1/2” rectangular wood case with glass front. Back panel has knob on outside that allows it to be slid up and down into groove to access the 9 slot 1 style compartments. Label on front is 95% present, label on inside of back panel near complete. Remnants of paper or tape on top and bottom of inside compartments. Light wear especially on corners and some scratches. Good (RRT) 100-200 6804-002 STANLEY No. 21 wood bottom smoothing plane. Rarest and most collectible of the wood bottom transitionals. Type 14 with faint U mark on toe, vee mark on cutter, light wear and scratching to wood, japanning retouched. Good (JCI266) 50-100 6804-003 STANLEY No. 1 plane. Early 4 type with solid adjustment knob without Bailey’s 2 name. T mark on cutter. Japanning retouched, 3 tip reglued on tote, wood otherwise fine. Large chip from throat. Good- (CVR40) 300-600 6804-004 STANLEY No. 2. Third sweetheart cutter, tall knob, notched rectangle lever cap with 99 stamped on cam, repaired crack in tote. Japanning 90%. Has large chip on rear left cheek. Good- (JMC60) 100-200 6 MERIDEN MALLEABLE 6804-005 7 IRON CO. -

443 Subpart D—Federally Promulgated Water Quality Standards
Environmental Protection Agency § 131.33 Subpart D—Federally Promulgated of streams located in Indian country, Water Quality Standards or as may be modified by the Regional Administrator, EPA Region X, pursu- § 131.31 Arizona. ant to paragraph (a)(3) of this section, ° (a) [Reserved] a temperature criterion of 10 C, ex- (b) The following waters have, in ad- pressed as an average of daily max- dition to the uses designated by the imum temperatures over a seven-day State, the designated use of fish con- period, applies to the waterbodies iden- sumption as defined in R18–11–101 tified in paragraph (a)(2) of this section (which is available from the Arizona during the months of June, July, Au- Department of Environmental Quality, gust and September. Water Quality Division, 3033 North (2) The following waters are pro- Central Ave., Phoenix, AZ 85012): tected for bull trout spawning and rearing: COLORADO MAIN STEM RIVER (i) BOISE-MORE BASIN: Devils BASIN: Creek, East Fork Sheep Creek, Sheep Hualapai Wash MIDDLE GILA RIVER BASIN: Creek. Agua Fria River (Camelback Road to (ii) BROWNLEE RESERVOIR BASIN: Avondale WWTP) Crooked River, Indian Creek. Galena Gulch (iii) CLEARWATER BASIN: Big Can- Gila River (Felix Road to the Salt yon Creek, Cougar Creek, Feather River) Creek, Laguna Creek, Lolo Creek, Queen Creek (Headwaters to the Su- Orofino Creek, Talapus Creek, West perior WWTP) Fork Potlatch River. Queen Creek (Below Potts Canyon) (iv) COEUR D’ALENE LAKE BASIN: SAN PEDRO RIVER BASIN: Cougar Creek, Fernan Creek, Kid Copper Creek Creek, Mica Creek, South Fork Mica SANTA CRUZ RIVER BASIN: Creek, Squaw Creek, Turner Creek. -

The Gaslight Equipment Catalogue
The Gaslight Equipment Catalogue Being a Compendium of various useful articles and sundries for the Victorian era, together with information pertaining to their use By Rod Basler Disclaimer: The following is a game supplement. The prices listed herein are based on historical research and are from period catalogs – while some of the items are still manufactured, they are not for sale at the prices listed here, and are not available either from the author or from Chaosium, Inc. All information about 19th century medications and medical treatments is for historical interest only – for the sake of everything that is holy, do NOT use them (and please tell me that I don’t need to say that.) Any comments or information about race or religion are neither the opinions of the author, nor of Chaosium, Inc., but rather are meant to be a reflection of the attitudes common among certain social classes of the period in question. They are in no way meant as either an offense or an endorsement. The role-playing game Call of Cthulhu is copyright © 2005 to Sandy Petersen and Lynn Willis. Images from the 1902 Sears Catalog are copyright © 2002 PrincetonImaging.com. Used with permission. All rights reserved. All other images and quotations are, to the best of my knowledge, in the public domain; if any are still under copyright, please contact the author. Copyright 2005 Acknowledgements The author would like to thank the following persons and organizations for their assistance with the research for this book: Ken Orlando and Smith-Victor, Inc.; Jim Troeller of Green's Security Centers, Inc.; Walter Shawlee and Clark McCoy of the Slide Rule Universe; Stuart Schneider and Bill Utley of the Flashlight Collectors of America; Dan Taylor at the Old Rhinebeck Aerodrome; Tina Armstrong of the News International Archives in London; Judy Lim-Sharpe and Andrea Pearson at the U.S. -

0017408.Pdf (13.13
THE INDUSTRIAL GEOGRAPHY OF THE KANAWHA VALLEY DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy In the Graduate School of The Ohio S tate U niversity By SELVA CARTER WILEY, B .A ., A.M. ***** The Ohio State University 1956 Approved byt — — A dviser Department of Geography 11 MAP I TOLL IRlQt KANAWHA VALLEY REGIONAL MAP tent lilt* tow TABLE OF CONTENTS PAQE INTRODUCTION.................... 1 A pproach ........... 2 Area of Study ....................................................................................................... U CHAPTER I - THE PHYSICAL LANDSCAPE .................................................................. 7 T e rra in .................................................................................................................... 7 Earth H istory ...................................................................................................... 11 CHAPTER I I - CLIMATE AND VEGETATION ............................................................. 17 C lim ate ..................................................................................................................... 17 Vegetation ........................................................................................................... 22 CHAPTER I I I - RESOURCES ......................................................................................... 26 C oal ......................................................................................................................... 26 Natural Gas -

Adirondack Chronology
An Adirondack Chronology by The Adirondack Research Library of the Association for the Protection of the Adirondacks Chronology Management Team Gary Chilson Professor of Environmental Studies Editor, The Adirondack Journal of Environmental Studies Paul Smith’s College of Arts and Sciences PO Box 265 Paul Smiths, NY 12970-0265 [email protected] Carl George Professor of Biology, Emeritus Department of Biology Union College Schenectady, NY 12308 [email protected] Richard Tucker Adirondack Research Library 897 St. David’s Lane Niskayuna, NY 12309 [email protected] Last revised and enlarged – 20 January (No. 43) www.protectadks.org Adirondack Research Library The Adirondack Chronology is a useful resource for researchers and all others interested in the Adirondacks. It is made available by the Adirondack Research Library (ARL) of the Association for the Protection of the Adirondacks. It is hoped that it may serve as a 'starter set' of basic information leading to more in-depth research. Can the ARL further serve your research needs? To find out, visit our web page, or even better, visit the ARL at the Center for the Forest Preserve, 897 St. David's Lane, Niskayuna, N.Y., 12309. The ARL houses one of the finest collections available of books and periodicals, manuscripts, maps, photographs, and private papers dealing with the Adirondacks. Its volunteers will gladly assist you in finding answers to your questions and locating materials and contacts for your research projects. Introduction Is a chronology of the Adirondacks really possible? -

THE BROWN BULLETIN to Further the Cause of Co-Operation, Progress and Friendliness
THE BROWN BULLETIN To Further the Cause of Co-operation, Progress and Friendliness BERLIN, N. H., APRIL 1, 1927 FOREST RANGER'S CABIN IN WJNPIGO DISTRICT IN THE SPRING THE BROWN BULLETIN A YOUNG MAN'S FANCY— PRINTED UPON NIBROCSUPERCALENDERED BOND Lightly turns to thoughts of love, sang the poet. But it may also turn to thoughts of baseball, motoring, pitching horseshoes, Vol. VIII. APRIL, 1927 No. 1O fishing, golf, or anything else he may be interested in. His fancy may even turn BROWN BULLETIN PUBLISHING ASSOCIATION toward nothing in particular but away from "The object of this organization is to publish a paper for the benefit of the employees of the Brown work. All of these come under the symp- Company and of the Brown Corporation, in which may appear items of local and general interest; and toms of "spring fever," a disease for which which will tend to further the causr of co-operation, progress and friendliness among and between a. no germ has yet been isolated. There are sections of these companies.*'—By-Laws, Article 2. no definite statistics to prove that pro- duction falls off in the spring, or that EDITORIAL STAFF accidents are more frequent. Day dream- ing as a cause of accidents is busy all the Editor — G. L. Cave Photographic Editor — Victor Beaudoin year round, but it is much harder to keep Associate Editors— Louville Paine, John Cartoonists— J. Daw, George Prowell the mind on the job in the spring when Business Manager-Gerald Kimball the outdoor world is most attractive. Re- James McGivney creation is great stuff to keep feeling fit but it won't mix with a job that requires BOARD OF DIRECTORS close attention to avoid accident.