AP3302-2(Communications).Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Variable Capacitors in RF Circuits
Source: Secrets of RF Circuit Design 1 CHAPTER Introduction to RF electronics Radio-frequency (RF) electronics differ from other electronics because the higher frequencies make some circuit operation a little hard to understand. Stray capacitance and stray inductance afflict these circuits. Stray capacitance is the capacitance that exists between conductors of the circuit, between conductors or components and ground, or between components. Stray inductance is the normal in- ductance of the conductors that connect components, as well as internal component inductances. These stray parameters are not usually important at dc and low ac frequencies, but as the frequency increases, they become a much larger proportion of the total. In some older very high frequency (VHF) TV tuners and VHF communi- cations receiver front ends, the stray capacitances were sufficiently large to tune the circuits, so no actual discrete tuning capacitors were needed. Also, skin effect exists at RF. The term skin effect refers to the fact that ac flows only on the outside portion of the conductor, while dc flows through the entire con- ductor. As frequency increases, skin effect produces a smaller zone of conduction and a correspondingly higher value of ac resistance compared with dc resistance. Another problem with RF circuits is that the signals find it easier to radiate both from the circuit and within the circuit. Thus, coupling effects between elements of the circuit, between the circuit and its environment, and from the environment to the circuit become a lot more critical at RF. Interference and other strange effects are found at RF that are missing in dc circuits and are negligible in most low- frequency ac circuits. -
EURO QUARTZ TECHNICAL NOTES Crystal Theory Page 1 of 8
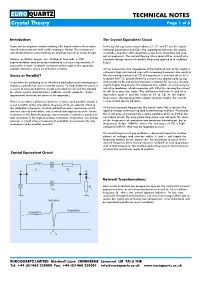
EURO QUARTZ TECHNICAL NOTES Crystal Theory Page 1 of 8 Introduction The Crystal Equivalent Circuit If you are an engineer mainly working with digital devices these notes In the crystal equivalent circuit above, L1, C1 and R1 are the crystal should reacquaint you with a little analogue theory. The treatment is motional parameters and C0 is the capacitance between the crystal non-mathematical, concentrating on practical aspects of circuit design. electrodes, together with capacitances due to its mounting and lead- out arrangement. The current flowing into a load at B as a result of a Various oscillator designs are illustrated that with a little constant-voltage source of variable frequency applied at A is plotted experimentation may be easily modified to suit your requirements. If below. you prefer a more ‘in-depth’ treatment of the subject, the appendix contains formulae and a list of further reading. At low frequencies, the impedance of the motional arm of the crystal is extremely high and current rises with increasing frequency due solely to Series or Parallel? the decreasing reactance of C0. A frequency fr is reached where L1 is resonant with C1, and at which the current rises dramatically, being It can often be confusing as to whether a particular circuit arrangement limited only by RL and crystal motional resistance R1 in series. At only requires a parallel or series resonant crystal. To help clarify this point, it slightly higher frequencies the motional arm exhibits an increasing net is useful to consider both the crystal equivalent circuit and the method inductive reactance, which resonates with C0 at fa, causing the current by which crystal manufacturers calibrate crystal products. -

Chapter 1 Frequency Sources
Chapter 1 Frequency Sources 4 Crystal Oscillators 5 Microwave Oscillator Stability What to consider in achieving “Best Performance” John Hazell, G8ACE This article discusses some of the con- 0' and 35° 2' would be used at ambient siderations governing the stability of a temperature. quartz oscillator source. Over the wider temperature range of Temperature dependence O°C to 60°C it might exhibit a stability Almost without exception, crystals are of 5ppm or 100kHz variation at 10GHz. marked with their operating frequency. The need to control the temperature However, operating temperature is becomes obvious and to do this the vitally important for stability and, for crystal must be held above ambient in a most crystals, this information is either Crystal Oven or Murata-style heater missing or hidden within a manufac- clip. Superior results can be obtained by turer’s code. The family of curves in the using a crystal whose angle of cut re- graph below show the turnover points sults in a turnover point matching the for AT cut Crystals. The angle of cut heater. Finally, the oscillator circuitry governs the turnover or best operating may contain components whose charac- temperature and this angle will typically teristics vary with temperature and lie between 34° 58' and 35° 13'. hence the frequency will still vary. One The ideal condition is to operate the solution here is to also temperature crystal on the flat part of its characteris- stabilise this circuitry. tic. Typically a crystal cut between 35° An ovened oscillator system, set to 6 1°C of the crystal turnover tempera- • Age the oscillator for as long as ture, would generally provide a high possible and this generally means degree of stability. -

Contents 1 66
CONTENTS DefinitionsOscillators Defined.and ParametersA Second Exampleof Oscillators which cannot be Classified as an Oscillator 1 .The Buzzer. Significance of Mechanical Motion. Weight and Spring System . Friction. Simple Harmonic Motion. Analogy between Certain Mechanical and Electrical Quantities. Concept of Energy Interchange. The Pendulum. Source of Restoring Force in Pendulum. Effect of Weight in Pendulum. Electrical Analogy of Pendulum Bob. The Balance Wheel. Repetitive Shock Excitation. Basic Parameters of Oscillators. Important Implications of Fourier Theorem. The D-C Component in an Oscillatory Wavetrain .Effects of Harmonics. Frequency and Phase Modulation .Resonance. Amplitude Build-up at Resonance. Performance Parameters of Oscillators. Questions and Problems 2. ComponentsParallel- Tuned andL-C Circuit.Characteristics Losses in a ofTank Oscillators Circuit. Characteristics of "Ideal" L-C 22 Resonant Circuit. Negative Power. Performance of Ideal Tank Circuit. Resonance in the Parallel- Tuned L-C Circuit. Inductance-Capacitance Relationships for Reson- ance .Practical Tank Circuits with Finite Losses. Figure of Merit, "Q" .Physical Interpretation of Ro .Phase Characteristics of Parallel- Tuned L-C Circuit. Series- Resonant Tank Circuits. Q in Series-Tank Circuits. Resonance in Series-Tuned L-C Circuit. L-C Ratio in Tank Circuits. Transmission Lines. The Delay Line . The Artificial Transmission Line. Delay-Line Stabilized Blocking Oscillator. Delay- Line Stabilized Tunnel Diode Oscillator. Distributed Parameters from "Lumped" L-C Circuit. Resonance in Transmission Lines. Concept of Field Propagation in Waveguides. Comparison of Lines and Guides. Resonant Cavities. Piezoelectric Property in Quartz Crystals. The Two Resonances in Quartz Crystals. The Relatively Small Tuning Effect of Holder Capacitance. Conditions for Optimum Stability . Magnetostrictive Element. Need for Bias. -
AC/RF Sources (Oscillators and Synthesizers) 14
AC/RF Sources (Oscillators and Synthesizers) 14 ust say in public that oscillators are one of the most important, fundamental building blocks in radio technology and you will immediately be interrupted by someone pointing out that tuned-RF (TRF) J receivers can be built without any form of oscillator at all. This is certainly true, but it shows how some things can be taken for granted. What use is any receiver without signals to receive? All intention- ally transmitted signals trace back to some sort of signal generator — an oscillator or frequency synthe- sizer. In contrast with the TRF receivers just mentioned, a modern, all-mode, feature-laden, MF/HF transceiver may contain in excess of a dozen RF oscillators and synthesizers, while a simple QRP CW transmitter may consist of nothing more than a single oscillator. (This chapter was written by David Stockton, GM4ZNX.) In the 1980s, the main area of progress in the performance of radio equipment was the recognition of receiver intermodulation as a major limit to our ability to communicate, with the consequent develop- ment of receiver front ends with improved ability to handle large signals. So successful was this cam- paign that other areas of transceiver performance now require similar attention. One indication of this is any equipment review receiver dynamic range measurement qualified by a phrase like “limited by oscillator phase noise.” A plot of a receiver’s effective selectivity can provide another indication of work to be done: An IF filter’s high-attenuation region may appear to be wider than the filter’s published specifications would suggest — almost as if the filter characteristic has grown sidebands! In fact, in a way, it has: This is the result of local-oscillator (LO) or synthesizer phase noise spoiling the receiver’s overall performance. -

Generation of Oscillations, Directly Or by Frequency-Changing, by Circuits Employing Active Elements Which Operate in a Non-Swit
H03B CPC COOPERATIVE PATENT CLASSIFICATION H ELECTRICITY (NOTE omitted) H03 BASIC ELECTRONIC CIRCUITRY H03B GENERATION OF OSCILLATIONS, DIRECTLY OR BY FREQUENCY-CHANGING, BY CIRCUITS EMPLOYING ACTIVE ELEMENTS WHICH OPERATE IN A NON- SWITCHING MANNER; GENERATION OF NOISE BY SUCH CIRCUITS (measuring, testing G01R; generators adapted for electrophonic musical instruments G10H; Speech synthesis G10L; masers, lasers H01S; dynamo-electric machines H02K; power inverter circuits H02M; by using pulse techniques H03K; automatic control of generators H03L; starting, synchronisation or stabilisation of generators where the type of generator is irrelevant or unspecified H03L; generation of oscillations in plasma H05H) WARNING In this subclass non-limiting references (in the sense of paragraph 39 of the Guide to the IPC) may still be displayed in the scheme. 1/00 Details 5/1225 . {the generator comprising multiple 1/02 . Structural details of power oscillators, e.g. amplifiers connected in parallel} for heating {(construction of transmitters 5/1228 . {the amplifier comprising one or more field H04B; features of generators for heating by effect transistors} electromagnetic fields H05B 6/00)} 5/1231 . {the amplifier comprising one or more bipolar 1/04 . Reducing undesired oscillations, e.g. harmonics transistors} 5/1234 . {and comprising means for varying the output 5/00 Generation of oscillations using amplifier with amplitude of the generator (H03B 5/1278 takes regenerative feedback from output to input precedence)} (H03B 9/00, H03B 15/00 take precedence) 5/1237 . {comprising means for varying the frequency 5/02 Details . of the generator} 5/04 . Modifications of generator to compensate for 5/124 . {the means comprising a voltage dependent variations in physical values, e.g. -

Oscillator Design Techniques Allow High Frequency Application Of
OSCILLATOR DESIGN TECHNIQUES ALLOW HIGH FREQUENCY APPLICATIONS OF INVERTED MESA RESONATORS By Kurt Wessendorf lithium niobate. The arrays are comprised of Sandia National Laboratories electrodes that alternate polarities. When an RF signal voltage of the proper frequency is Albuquerque, New Mexico applied across them, the surface of the crystal expands and contracts, generating a Tom Payne displacement wave on the surface of the President crystal. Avance Technology TmT Bulk Acoustic Wave Resonator Cedar City, Utah Model By using inverted-mesa techniques to Bulk acoustic wave (BAW) resonators selectively thin the resonator, the practical operate on entirely different principles. The upper frequency range of bulk wave crystal displacement wave produces a resonating oscillators has risen dramatically over the past vibration which travels through the crystal. The several years. A new technology called Tab- crystallographic orientation used in mesa Technology (TmT) has paved the way for manufacturing BAW devices is crucial to their new design approaches in telecommunications performance characteristics. For applications applications including small, portable high- in the Megahertz range, the AT-cut is the most frequency equipment such as pagers, cellular common orientation because of its relatively telephones, keyless entry and other wireless low temperature coefficients. Figure 1 is the communications systems. Many designers electrical equivalent model of the AT-Cut have shied away from these new devices resonator. This model shows only the because of the lack of standardized design fundamental and the first two overtones of the practices. Fortunately, as this article will resonator. Also, not shown in this model, are demonstrate, many classic bulk wave designs the spurious modes that can exist. -

International Crystal Manufacturing CRYSTAL OSCILLATOR and FILTER PRODUCTS
International Crystal Manufacturing CRYSTAL OSCILLATOR AND FILTER PRODUCTS International Crystal Manufacturing, Inc. P.O. Box 1768 • Oklahoma City, OK 73101-1768 • Phone (405) 236-3741 Fax (405) 235-1904 • Toll Free 1-800-725-1426 • 24 Hr. Toll Free Fax 1-800-322-9426 • www.icmfg.com • E-mail [email protected] Rev. A QUARTZ CRYSTALS Quartz Crystal Selection Guide ------------------------------------------------------------------------- 5-7 Standard Microprocessor Crystals ------------------------------------------------------------------------ 8 Build A Crystal-------------------------------------------------------------------------------------------------- 9 T38 Micro Miniature “AT Strip” Crystal ----------------------------------------------------------------- 10 HC49US/S Resistance Weld Low Profile Crystal ---------------------------------------------------- 11 HC49U Resistance Weld Crystal ------------------------------------------------------------------------ 12 HC45U Resistance Weld Miniature Crystal ---------------------------------------------------------- 13 CONTENTS HC35U Resistance Weld Miniature Crystal ---------------------------------------------------------- 14 HC50U Resistance Weld Miniature Crystal ---------------------------------------------------------- 15 HC51U Low Frequency Crystal-------------------------------------------------------------------------- 16 T26W/T38W Tuning Fork Watch Crystal -------------------------------------------------------------- 17 S53 Micro Miniature Ceramic SMD Crystal----------------------------------------------------------- -

AN1983 Crystal Oscillators and Frequency Multipliers Using the NE602 and NE5212
INTEGRATED CIRCUITS AN1983 Crystal oscillators and frequency multipliers using the NE602 and NE5212 1991 Dec Philips Semiconductors Philips Semiconductors Application note Crystal oscillators and frequency multipliers AN1983 using the NE602 and NE5212 INTRODUCTION than their LC counterparts. Figure 1 shows the equivalent circuit of This paper shows how to use the NE602 and NE5212 in VHF and a quartz crystal. UHF LO generators. The NE602 is a very low power active mixer, yet 7th overtone crystal oscillations are relatively easy to build. Optimization of such circuits is shown in the first part of this paper. Although designed as a fiber optic amplifier, the NE5212 can be used as a feedback oscillator with good results. The second part of L this paper shows how the NE602 can be used as a frequency dou- bler. Combinations of the two techniques can give the RF designer CO a wide variety of low power VHF/UHF signal sources from overtone C oscillators and/or frequency multiplier chains. R OSCILLATORS One of the most esoteric topics in RF theory is oscillators. Oscilla- tors are fundamental elements in both receiver and transmitter cir- cuitry. Often they are the limiting elements to a receiver’s SL01148 performance. Much work has and is being conducted to build better Figure 1. Equivalent Circuit of a Crystal oscillators and the oscillator’s more sophisticated cousin, the syn- The exact equivalent circuit constants in Figure 1 will be affected by thesizer. several mechanical considerations, of which physical size of the At first glance oscillators would appear to be rather simple. A stage crystal is perhaps the most important. -

5 Universal Oscillator Circuits
Preface The subject of oscillators has been somewhat of a dilemma; on the one hand, we have never lacked for mathematically oriented treatises~the topic appears to be a fertile field for the 'long-haired' approach. These may serve the needs of the narrow specialist, but tend to be foreboding to the working engineer and also to the intelligent electronics practitioner. On the other hand, one also observes the tendency to trivialize oscillator circuits as nothing more than a quick association of logic devices and resonant circuits. Neither of these approaches readily provides the required insights to devise oscillators with optimized performance features, to service systems highly dependent upon oscillator behaviour, or to understand the many trade-offs involved in tailoring practical oscillators to specific demands. Whereas it would be unrealistic to infer that these two approaches do not have their place, it appears obvious that a third approach could be useful in bringing theory and hardware together with minimal head-scratching. This third approach to the topic of oscillators leans heavily on the concept of the universal amplifier. It stems from the fact that most oscillators can be successfully implemented with more than a single type of active device. Although it may not be feasible to directly substitute one active device for another, a little experimentation with the d.c. supply, bias networks, and feedback circuits does indeed enable a wide variety of oscillators to operate in essentially the same manner with npn or pnp transistors, N-channel of P-channel JFETs, MOSFETs, op amps or ICs, or with electron tubes. -

Oscillator Design and Computer Simulation Randall W
Oscillator Design and Computer Simulation Randall W. Rhea 1995, hardcover, 320 pages, ISBN l-8849-32-30-4 This book covers the design of L-C, transmission line, quartz crystal and SAW oscillators. The unified approach presented can be used with a wide range of active devices and resonator types. Valuable to experi- enced engineers and those new to oscillator design. Topics include: limit- ing and starting, biasing, noise, analysis and oscillator fundamentals. The electronic text that follows was scanned from the Noble publish- ing edition of Oscillator Design and Computer Simulation. The book is available from the publisher for $49.00 (list price $64.00). Please mention Eagleware offer to receive this discount. To order, contact: Noble Publishing Corporation 630 Pinnacle Court Norcross, GA 30071 USA Phone: 770-449-6774 Fax: 770-448-2839 E-mail: [email protected] Dealer discounts and bulk quantity discounts available. OSCILLATOR DESIGN AND COMPUTER SIMULATION Randall W. Rhea Founder and President Eagleware Corporation Second Edition BLE Noble Publishing Corporation Atlanta Standard Cataloging-in-Publication Data Rhea, Randall W. Oscillator design and computer simulation/Randall W Rhea 2nd ed. p. cm. Includes bibliographical references. ISBN l-884932-30-4 1. Radio frequency oscillators-Design and construction. 2. Oscillators, Microwave-Design and construction 3. Oscillators, Electric-Computer simulation I.Title TK7872.07R54 1995 621.381’533 To order contact: Noble Publishing Corporation 4772 Stone Drive Tucker, Georgia 30084 USA TEL (770)908-2320 FAX (770)939-0157 Discounts are available when ordered in bulk quantities. Cover Designer and Copy Editor: Crawford Patterson NOBLE Publishing Corporation 0 1995 by Noble Publishing Corporation All rights reserved.No part of this book may be reproduced in any form or by any means without written permission of the publisher.Contact the Permissions Department at the address above. -

9.3 Oscillator Circuits and Construction
Contents 9.1 How Oscillators Work 9.6 Oscillators at UHF and Above 9.1.1 Resonance 9.6.1 UHF Oscillators: Intentional and Accidental 9.1.2 Maintained Resonance 9.6.2 Microwave Oscillators (CW: Continuous Waves) 9.6.3 Klystrons, Magnetrons, and Traveling 9.1.3 Oscillator Start-Up Wave Tubes 9.1.4 Negative Resistance Oscillators 9.7 Frequency Synthesizers 9.2 Phase Noise 9.7.1 Phase-Locked Loops 9.2.1 Effects of Phase Noise 9.7.2 PLL Loop Filter Design 9.2.2 Reciprocal Mixing 9.7.3 Fractional-N Synthesis 9.2.3 A Phase Noise Demonstration 9.7.4 PLL Synthesizer Phase Noise 9.2.4 Transmitted Phase Noise 9.7.5 Improving VCO Noise Performance 9.3 Oscillator Circuits and Construction 9.7.6 A PLL Design Example 9.3.1 LC VFO Circuits 9.7.7 PLL Measurements and Troubleshooting 9.3.2 RC VFO Circuits 9.7.8 Commercial Synthesizer ICs 9.3.3 Three High-Performance HF VFOs 9.8 Glossary of Oscillator and Synthesizer Terms 9.4 Building an Oscillator 9.9 References and Bibliography 9.4.1 VFO Components and Construction 9.4.2 Temperature Compensation 9.4.3 Shielding and Isolation 9.5 Crystal Oscillators 9.5.1 Quartz and the Piezoelectric Effect 9.5.2 Frequency Accuracy 9.5.3 The Equivalent Circuit of a Crystal 9.5.4 Crystal Oscillator Circuits 9.5.5 VXOs 9.5.6 Logic-Gate Crystal Oscillators Chapter 9 — CD-ROM Content Supplemental Files • Measuring Receiver Phase Noise • “Oscillator Design Using LTSpice” by David Stockton, GM4ZNX (includes LTSpice simulation files in SwissRoll folder) • Using the MC1648 in Oscillators • “Novel Grounded Base Oscillator Design for VHF-UHF” by Dr Ulrich Rohde, N1UL • “Optimized Oscillator Design” by Dr Ulrich Rohde, N1UL • “Oscillator Phase Noise” by Dr Ulrich Rohde, N1UL • “Some Thoughts On Crystal Oscillator Design” by Dr Ulrich Rohde, N1UL Chapter 9 Oscillators and Synthesizers The sheer number of different oscillator circuits seen in the literature can be intimidating, but their great diversity is an illusion that evaporates once their underlying pattern is seen.