AC/RF Sources (Oscillators and Synthesizers) 14
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 6 BUILDING a HOMEBREW
1. Chapter 6, Harris CRYSTAL SETS TO SIDEBAND © Frank W. Harris 2002 Chapter 6 BUILDING A HOMEBREW QRP Among the guys I work, QRPs seem to be the most common homebrew project, second only to building antennas. Therefore this chapter describes a simple QRP design I have settled on. I use my QRPs as stand-alone transmitters or I use them to drive a final amplifier to produce higher power, 25 to 100 watts. It’s true that before you build a transmitter you’ll need a receiver. Unfortunately, a good selective, all-band ham receiver is complicated to build and most guys don’t have the time and enthusiasm to do it. (See chapter 13.) The next chapter describes building a simple, 5 transistor 40 meter receiver which I have used with the QRP below to talk to other hams. This simple receiver will work best during off hours when 40 meters isn’t crowded. It can also be used to receive Morse code for code practice. A 40 meter QRP module. The QRP transmitter above is designed exclusively for 40 meters, (7.000 to 7.300 MHz.) The twelve-volt power supply comes in through the pig-tail wire up on the right. The telegraph key plugs into the blue-marked phono plug socket on the right of the aluminum heat sink. The antenna output is the red-colored socket on the left end of the heat sink. The transmitting frequency of the QRP module is controlled by a quartz crystal. That’s the silver rectangular can plugged into the box on the right front. -
Soft Ferrites Applications
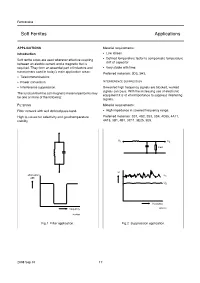
Ferroxcube Soft Ferrites Applications APPLICATIONS Material requirements: Introduction • Low losses • Defined temperature factor to compensate temperature Soft ferrite cores are used wherever effective coupling drift of capacitor between an electric current and a magnetic flux is required. They form an essential part of inductors and • Very stable with time. transformers used in today’s main application areas: Preferred materials: 3D3, 3H3. • Telecommunications • Power conversion INTERFERENCE SUPPRESSION • Interference suppression. Unwanted high frequency signals are blocked, wanted signals can pass. With the increasing use of electronic The function that the soft magnetic material performs may equipment it is of vital importance to suppress interfering be one or more of the following: signals. FILTERING Material requirements: Filter network with well defined pass-band. • High impedance in covered frequency range. High Q-values for selectivity and good temperature Preferred materials: 3S1, 4S2, 3S3, 3S4, 4C65, 4A11, stability. 4A15, 3B1, 4B1, 3C11, 3E25, 3E5. andbook, halfpage handbook, halfpage U1 U2 load U attenuation U1 (dB) U2 frequency frequency MBW404 MBW403 Fig.1 Filter application. Fig.2 Suppression application. 2008 Sep 01 17 Ferroxcube Soft Ferrites Applications DELAYING PULSES STORAGE OF ENERGY The inductor will block current until saturated. Leading An inductor stores energy and delivers it to the load during edge is delayed depending on design of magnetic circuit. the off-time of a Switched Mode Power Supply (SMPS). Material requirements: Material requirements: • High permeability (µi). • High saturation level (Bs). Preferred materials: 3E25, 3E5, 3E6, 3E7, 3E8, 3E9. Preferred materials: 3C30, 3C34, 3C90, 3C92, 3C96 2P-iron powder. U U handbook, halfpage 1 handbook, halfpage1 U2 U2 SMPS load delay U U U1 U2 U1 U2 time time MBW405 MBW406 Fig.3 Pulse delay application. -
Spectrum Analyzer Circuits 062-1055-00
Circuit Concepts BOOKS IN THIS SERIES: Circuit Concepts Power Supply Circuits 062-0888-01 Oscilloscope Cathode-Ray Tubes 062-0852-01 Storage Cathode-Ray Tubes and Circuits 062-0861-01 Television Waveform Processing Circuits 062-0955-00 Digital Concepts 062-1030-00 Spectrum Analyzer Circuits 062-1055-00 Oscilloscope Trigger Circuits 062-1056-00 Sweep Generator Circuits 062-1098-00 Measurement Concepts Information Display Concepts 062-1005-00 Semiconductor Devices 062-1009-00 Television System Measurements 062-1064-00 Spectrum Analyzer Measurements 062-1070-00 Engine Analysis 062-1074-00 Automated Testing Systems 062-1106-00 SPECTRUM ANALYZER CIRCUITS BY MORRIS ENGELSON Significant Contributions by GORDON LONG WILL MARSH CIRCUIT CONCEPTS FIRST EDITION, SECOND PRINTING, AUGUST 1969 062-1055-00 ©TEKTRONIX, INC.; 1969 BEAVERTON, OREGON 97005 ALL RIGHTS RESERVED CONTENTS 1 BACKGROUND MATERIAL 1 2 COMPONENTS AND SUBASSEMBLIES 23 3 FILTERS 55 4 AMPLI FI'ERS 83 5 MIXERS 99 6 OSCILLATORS 121 7 RF ATTENNATORS 157 BIBLIOGRAPHY 171 INDEX 175 1 BACKGROUND MATERIAL Many spectrum analyzer circuits are based on principles with which most engineers may not be familiar. It is the purpose of this chapter to review some of this specialized background material. This review is not intended to be either complete or rigorous. Those desiring a more complete discussion are referred to the basic references and the bibliography. TRANSMISSION LINES* At low frequencies the basic circuit elements are lumped. At higher frequencies, however, where the size of circuit elements is comparable to a wavelength, lumped elements can not be used easily, if at all. This accounts for the extensive use of distributed circuits at higher frequencies. -

AN826 Crystal Oscillator Basics and Crystal Selection for Rfpic™ And
AN826 Crystal Oscillator Basics and Crystal Selection for rfPICTM and PICmicro® Devices • What temperature stability is needed? Author: Steven Bible Microchip Technology Inc. • What temperature range will be required? • Which enclosure (holder) do you desire? INTRODUCTION • What load capacitance (CL) do you require? • What shunt capacitance (C ) do you require? Oscillators are an important component of radio fre- 0 quency (RF) and digital devices. Today, product design • Is pullability required? engineers often do not find themselves designing oscil- • What motional capacitance (C1) do you require? lators because the oscillator circuitry is provided on the • What Equivalent Series Resistance (ESR) is device. However, the circuitry is not complete. Selec- required? tion of the crystal and external capacitors have been • What drive level is required? left to the product design engineer. If the incorrect crys- To the uninitiated, these are overwhelming questions. tal and external capacitors are selected, it can lead to a What effect do these specifications have on the opera- product that does not operate properly, fails prema- tion of the oscillator? What do they mean? It becomes turely, or will not operate over the intended temperature apparent to the product design engineer that the only range. For product success it is important that the way to answer these questions is to understand how an designer understand how an oscillator operates in oscillator works. order to select the correct crystal. This Application Note will not make you into an oscilla- Selection of a crystal appears deceivingly simple. Take tor designer. It will only explain the operation of an for example the case of a microcontroller. -

AN-400 a Study of the Crystal Oscillator for CMOS-COPS
AN-400 A Study Of The Crystal Oscillator For CMOS-COPS Literature Number: SNOA676 A Study of the Crystal Oscillator for CMOS-COPS AN-400 National Semiconductor A Study of the Crystal Application Note 400 Oscillator for Abdul Aleaf August 1986 CMOS-COPSTM INTRODUCTION TABLE I The most important characteristic of CMOS-COPS is its low A. Crystal oscillator vs. external squarewave COP410C power consumption. This low power feature does not exist change in current consumption as a function of frequen- in TTL and NMOS systems which require the selection of cy and voltage, chip held in reset, CKI is d4. low power IC's and external components to reduce power I e total power supply current drain (at VCC). consumption. Crystal The optimization of external components helps decrease the power consumption of CMOS-COPS based systems Inst. cyc. V f ImA even more. CC ckI time A major contributor to power consumption is the crystal os- 2.4V 32 kHz 125 ms 8.5 cillator circuitry. m Table I presents experimentally observed data which com- 5.0V 32 kHz 125 s83 pares the current drain of a crystal oscillator vs. an external 2.4V 1 MHz 4 ms 199 squarewave clock source. 5.0V 1 MHz 4 ms 360 The main purpose of this application note is to provide ex- perimentally observed phenomena and discuss the selec- External Squarewave tion of suitable oscillator circuits that cover the frequency Inst. cyc. range of the CMOS-COPS. V f I CC ckI time Table I clearly shows that an unoptimized crystal oscillator draws more current than an external squarewave clock. -
Designing Magnetic Components for Optimum Performance Article
Power Supply Design Seminar Designing Magnetic Components for Optimum Performance in Low-Cost AC/DC Converter Applications Topic Category: Magnetic Component Design Reproduced from 2010 Texas Instruments Power Supply Design Seminar SEM1900, Topic 5 TI Literature Number: SLUP265 © 2010, 2011 Texas Instruments Incorporated Power Seminar topics and online power- training modules are available at: power.ti.com/seminars Designing Magnetic Components for Optimum Performance in Low-Cost AC/DC Converter Applications Seamus O’Driscoll, Peter Meaney, John Flannery, and George Young AbstrAct Assuming that the reader is familiar with basic magnetic design theory, this topic provides design guidance to achieve high efficiency, low electromagnetic interference (EMI), and manufacturing ease for the magnetic components in typical offline power converters. Magnetic-component designs for a 90-W notebook adapter and a 300-W ATX power supply are used as examples. Magnetic applications to be considered include the input EMI filter, power inductor design, high-voltage (HV) level-shifting gate drives, and single- and multiple-output forward-mode transformers in both wound and planar formats. The techniques are also applied to flyback “transformers” (coupled inductors) and will enable lower- profile designs with lower intrinsic common-mode noise generation. I. IntroductIon Gate Drive Note: The SI (extended MKS) units system AC Filter PFC Isolated Main Drive (for some Converter Output(s) is used throughout this topic. CM Inductor, topologies), Balanced Bridge, Differential This material is intended as a high- PFC Inductor, Multi-Output Filter level overview of the primary consider- Bias Flyback ations when designing magnetic components for high-volume and cost- Isolated Feedback optimized applications such as computer Fig. -

APPLICATION NOTE How to Select the Right Reinforced Transformer for High Voltage Energy Storage Applications
APPLICATION NOTE How to Select the Right Reinforced Transformer for High Voltage Energy Storage Applications Introduction Providing isolated low voltage bias power to ICs such as microcontrollers, analog-to-digital HCT Series converters, isolated gate drivers or voltage monitoring ICs in high voltage systems is usually accomplished with an isolated DC-DC converter. If the high voltage system is spread out over several modules, the architecture may call for a parallel DC bus on the low voltage side with multiple isolated low power DC-DC converters for each module. Because it is used multiple times in this scenario, an efficient and cost-effective topology is the best approach. This application note highlights the design benefits of using push-pull transformers that are proven solutions for these situations. Used as an example is the Bourns® Model HCTSM8 series transformer, which is AEC-Q200 compliant and available with a wide range of turns ratios as standard. Multiple turns ratios are an important feature enabling the same basic circuit topology to be replicated across a system with the same components and PCB layout. With a transformer series like the Model HCTSM8, designers are able to select the right reinforced transformer part number based on the specified output voltage for powering a microcontroller or an isolated IGBT gate driver. www.bourns.com 07/20 • e/IC2075 APPLICATION NOTE How to Select the Right Reinforced Transformer for High Voltage Energy Storage Applications Why Push-Pull Transformers are an Optimal Choice Electrical Advantages HCT Series Push-pull transformers are known to operate well with low voltages and low variations in input and output. -

Very High Frequency Integrated POL for Cpus
Very High Frequency Integrated POL for CPUs Dongbin Hou Dissertation submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY in Electrical Engineering Fred C. Lee, Chair Qiang Li Rolando Burgos Daniel J. Stilwell Dwight D. Viehland March 23rd, 2017 Blacksburg, Virginia Keywords: Point-of-load converter, integrated voltage regulator, very high frequency, 3D integration, ultra-low profile inductor, magnetic characterizations, core loss measurement © 2017, Dongbin Hou Dongbin Hou Very High Frequency Integrated POL for CPUs Dongbin Hou Abstract Point-of-load (POL) converters are used extensively in IT products. Every piece of the integrated circuit (IC) is powered by a point-of-load (POL) converter, where the proximity of the power supply to the load is very critical in terms of transient performance and efficiency. A compact POL converter with high power density is desired because of current trends toward reducing the size and increasing functionalities of all forms of IT products and portable electronics. To improve the power density, a 3D integrated POL module has been successfully demonstrated at the Center for Power Electronic Systems (CPES) at Virginia Tech. While some challenges still need to be addressed, this research begins by improving the 3D integrated POL module with a reduced DCR for higher efficiency, the vertical module design for a smaller footprint occupation, and the hybrid core structure for non-linear inductance control. Moreover, as an important category of the POL converter, the voltage regulator (VR) serves an important role in powering processors in today’s electronics. -

Ferrite and Metal Composite Inductors
Ferrite and Metal Composite Inductors Design and Characteristics © 2019 KEMET Corporation What is an Inductor? Coil Magnetic Magnetic flux φ (Wire) Field dφ Core e = - dt Material i The coil converts electric energy into magnetic energy and stores it. e Core Material Current through the coil of wire creates a magnetic field Air Ferrite Metal and stores it. (None) (Iron) Composite Different core materials change magnetic field strength. © 2019 KEMET Corporation Ferrite Inductor or Metal Composite Inductor? Ferrite InductorFerrite Metal InductorMetal Composite MaterialMaterial Type type Ni-ZnNi-Zn Mn-Zn Mn-Zn Fe based Fe Based Very Good!! No Good.. InductanceInductace GoodGood! Very Good No Good Very Good!! Magnetic Saturation Good! No Good.. Good! No Good.. Very Good!! MagneticThermal Saturation Property Good No Good Very Good Good! Very Good!! Good! Efficiency Very Good!! No Good.. Good! ThermalResistance Property of core Good No Good Very Good Efficiency SBC/SBCPGood TPI Very GoodMPC, MPCV Good Products MPLC, MPLCV Resistance of Core Very Good No Good Good © 2019 KEMET Corporation Ferrite and Metal Composite Comparison Advantage of Ferrite 1. Higher inductance with high permeability 2. Stable inductance in the right range High L and Low DCR capability Advantage of Metal Composite 1. Very slow saturation 2. Very stable saturation for the thermal Core Loss Comparison Good for Auto app especially Advantage of Ferrite Very low core loss in dynamic frequency range Mn-Zn Ferrite Metal Core Low power consumption capability © 2019 KEMET Corporation -
Sinusoidal and Non- Sinusoidal Oscillators
CHAPTER65 Learning Objectives ➣ What is an Oscillator? SINUSOIDAL ➣ Classification of Oscillators ➣ Damped and Undamped AND NON- Oscillations ➣ Oscillatory Circuit ➣ Essentials of a Feedback LC SINUSOIDAL Oscillator ➣ Tuned Base Oscillator ➣ Tuned Collector Oscillator OSCILLATORS ➣ Hartley Oscillator ➣ FET Hartley Oscillator ➣ Colpitts Oscillator ➣ Clapp Oscillator ➣ FET Colpitts Oscillator ➣ Crystal Controlled Oscillator ➣ Transistor Pierce Cystal Oscillator ➣ FET Pierce Oscillator ➣ Phase Shift Principle ➣ RC Phase Shift Oscillator ➣ Wien Bridge Oscillator ➣ Pulse Definitions ➣ Basic Requirements of a Sawtooth Generator ➣ UJT Sawtooth Generator ➣ Multivibrators (MV) ➣ Astable Multivibrator An oscillator is an electronic device used for ➣ Bistable Multivibrator (BMV) the purpose of generating a signal. Oscillators ➣ Schmitt Trigger are found in computers, wireless receivers ➣ Transistor Blocking Oscillator and transmitters, and audiofrequency equipment particularly music synthesizers 2408 Electrical Technology 65.1. What is an Oscillator ? An electronic oscillator may be defined in any one of the following four ways : 1. It is a circuit which converts dc energy into ac energy at a very high frequency; 2. It is an electronic source of alternating cur- rent or voltage having sine, square or sawtooth or pulse shapes; 3. It is a circuit which generates an ac output signal without requiring any externally ap- Oscillator plied input signal; 4. It is an unstable amplifier. These definitions exclude electromechanical alternators producing 50 Hz ac power or other devices which convert mechanical or heat energy into electric energy. 65.2. Comparison Between an Amplifier and an Oscillator As discussed in Chapter-10, an amplifier produces an output signal whose waveform is similar to the input signal but whose power level is generally high. -

P020190719536109927550.Pdf
Integrated Circuits and Systems Series Editor Anantha Chandrakasan, Massachusetts Institute of Technology Cambridge, Massachusetts For other titles published in this series, go to www.springer.com/series/7236 Eric Vittoz Low-Power Crystal and MEMS Oscillators The Experience of Watch Developments Eric Vittoz Ecole Polytechnique Fédérale de Lausanne (EPFL) 1015 Lausanne Switzerland [email protected] ISSN 1558-9412 ISBN 978-90-481-9394-3 e-ISBN 978-90-481-9395-0 DOI 10.1007/978-90-481-9395-0 Springer Dordrecht Heidelberg London New York Library of Congress Control Number: 2010930852 © Springer Science+Business Media B.V. 2010 No part of this work may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, microfilming, recording or otherwise, without written permission from the Publisher, with the exception of any material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Cover design: Spi Publisher Services Printed on acid-free paper Springer is part of Springer Science+Business Media (www.springer.com) To my wife Monique Contents Preface ...................................................... xi Symbols ..................................................... xiii 1 Introduction ............................................. 1 1.1 Applications of Quartz Crystal Oscillators. ................ 1 1.2 HistoricalNotes ...................................... 2 1.3 TheBookStructure................................... -
Variable Capacitors in RF Circuits
Source: Secrets of RF Circuit Design 1 CHAPTER Introduction to RF electronics Radio-frequency (RF) electronics differ from other electronics because the higher frequencies make some circuit operation a little hard to understand. Stray capacitance and stray inductance afflict these circuits. Stray capacitance is the capacitance that exists between conductors of the circuit, between conductors or components and ground, or between components. Stray inductance is the normal in- ductance of the conductors that connect components, as well as internal component inductances. These stray parameters are not usually important at dc and low ac frequencies, but as the frequency increases, they become a much larger proportion of the total. In some older very high frequency (VHF) TV tuners and VHF communi- cations receiver front ends, the stray capacitances were sufficiently large to tune the circuits, so no actual discrete tuning capacitors were needed. Also, skin effect exists at RF. The term skin effect refers to the fact that ac flows only on the outside portion of the conductor, while dc flows through the entire con- ductor. As frequency increases, skin effect produces a smaller zone of conduction and a correspondingly higher value of ac resistance compared with dc resistance. Another problem with RF circuits is that the signals find it easier to radiate both from the circuit and within the circuit. Thus, coupling effects between elements of the circuit, between the circuit and its environment, and from the environment to the circuit become a lot more critical at RF. Interference and other strange effects are found at RF that are missing in dc circuits and are negligible in most low- frequency ac circuits.