Survey of the Operation and System Study on Wireless Charging Electric Vehicle Systems T
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
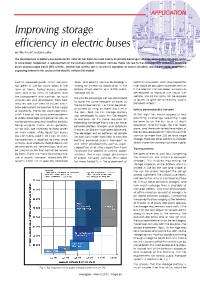
Improving Storage Efficiency in Electric Buses by Mike Rycroft, Features Editor
Improving storage efficiency in electric buses by Mike Rycroft, features editor The development of battery powered electric vehicles has been focused mainly on private passenger vehicles, while public transport seems to have been neglected. A reassessment of the journeys public transport vehicles make has led to the development of battery powered buses and bus rapid transit (BRT) systems. Several trial systems are in successful operation at various locations around the world, and there is a growing interest in this sector of the electric vehicle (EV) market. Electric powered public mass transport lanes, and electric vehicle technology is batteries and super- and ultra-capacitors has been in use for many years in the finding an increasing application in the than would be possible in a private vehicle. form of trams, trolley buses, subway battery driven electric bus (BDEB) public If the electric car has been successfully trains and other forms of transport, and transport sector. developed to replace the liquid fuel the components and controls for such vehicle, should the same not be applied The electric passenger car was developed vehicles are well developed. Tram-type to buses to give an all-electric public to have the same freedom of travel as vehicles are confined to routes which transport system? the liquid fuel version, i.e. it can be driven allow permanent connection to the supply anywhere as long as there was fuel in Battery powered public transport of electricity, mainly by overhead wires, the tank, and the EVs storage battery which have all the associated problems was developed to allow this. -
Intelligent Transportation Systems Benefits, Costs, and Lessons Learned 2017 Update Report
Intelligent Transportation Systems Benefits, Costs, and Lessons Learned 2017 Update Report www.its.dot.gov/index.htm Final Report — March 2017 Publication Number: FHWA-JPO-17-500 1.1.1.1.1.1 Produced by Noblis, Inc. U.S. Department of Transportation ITS Joint Program Office Notice This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. The U.S. Government is not endorsing any manufacturers, products, or services cited herein and any trade name that may appear in the work has been included only because it is essential to the contents of the work. Cover Photo Credit: Top Row (Left to right) – ThinkStock, U.S. DOT, ThinkStock Middle Row (Left to Right) – U.S. DOT, ThinkStock, ThinkStock Bottom Row (Left to Right) – U.S. DOT, ThinkStock, ThinkStock Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. FHWA-JPO-17-500 4. Title and Subtitle 5. Report Date Intelligent Transportation Systems Benefits, Costs, and Lessons Learned: March 2017 2017 Update Report 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Greg Hatcher, Drennan Hicks , Cheryl Lowrance, Mike Mercer, Mike Brooks, Kathy Thompson, Alexa Lowman, Amy Jacobi, Rachel Ostroff (ICF), Nayel Urena Serulle (ICF), Amanda Vargo (ICF) 9. Performing Organization Name And Address 10. Work Unit No. (TRAIS) Noblis 600 Maryland Ave., SW, Suite 700E Washington, DC 20024 11. Contract or Grant No. DTFH61-11-D-00018 12. Sponsoring Agency Name and Address 13. -

Master Thesis Master's Programme in Industrial Management and Innovation, 60 Credits
Master Thesis Master's Programme in Industrial Management and Innovation, 60 credits Status of The Technology for Electrical Road Focusing on Wireless Charging International Outlook Thesis in Industrial Management and Innovation, 15 Credits Halmstad 2020-06-14 Padma Kumar Parameswaran Thampi, Thomas Paul Thodukulam Poulose HALMSTAD UNIVERSITY Abstract The transportation sector has a vital role in today’s society and accounts for 20 % of our global total energy consumption. It is also one of the most greenhouse gas emission intensive sectors as almost 95 % of its energy originates from petroleum-based fuels. Due to the possible harmful nature of greenhouse gases, there is a need for a transition to more sustainable transportation alternatives. A possible alternative to the conventional petroleum- based road transportation is, implementation of Electric Road Systems (ERS) in combination with electric vehicles (Evs). There are currently three proven ERS technologies, namely, conductive power transfer through overhead lines, conductive power transfer from rails in the road and inductive power transfer through the road. The wireless charging or inductive charging electric vehicles (EV) are a type of EVs with a battery which is charged from a charging infrastructure and using the wireless power transfer technology. The wireless charging EVs are classified as stationary or dynamic charging EVs. The stationary charging EVs charge wirelessly when they are parked as well as dynamic charging EVs can charge while they are in motion. Number of studies have reported that, one of the main benefits of dynamic charging is, it allows smaller as well as lighter batteries to be used due to the frequent charging using in the charging infrastructure embedded under roads. -

Public Transport Bus Can Be Charged Wirelessly On-The-Go
Innovation > Telecommunications > Public transport bus can be charged wirelessly on-the-go PUBLIC TRANSPORT BUS CAN BE CHARGED WIRELESSLY ON-THE- GO TELECOMMUNICATIONS Researchers at the Korea Advanced Institute of Science and Technology have developed the OLEV, an electric bus designed for mass transit that can be charged wirelessly, while stationary or moving. Although vehicles such as the lightweight Navia shuttle have shown the feasibility of electric vehicles as public transport, researchers at the Korea Advanced Institute of Science and Technology (KAIST) have now developed the OLEV, an electric bus designed for mass transit that can be charged wirelessly, while stationary or moving. Standing for Online Electric Vehicle, the idea for the OLEV was inspired by previous transportation devices such as commercial trams and shuttle buses created at KAIST. Where the trams use overhead power cables to run, a new route located in the city of Gumi in South Korea includes magnetic field resonance cables buried under the road surface. These cables are able to charge the batteries of the OLEV as it runs along the route through inductive charging. This means that the vehicle can travel along the 24-kilometer route without having to stop to be recharged, which in turn allows the developers to use a battery that is one-third of the size of those included in typical electric cars, reducing the weight of the vehicle. The transport option was launched to the public in August and the team behind the OLEV want to introduce ten more buses by 2015. Could this idea provide the basis for more viable electricity- based public and private transport in the future? 12th September 2013 Website: www.kaist.edu Contact: www.twitter.com/KAISTofficial . -

Plug-In Electric Bus Depot Charging with PV and ESS and Their Impact on LV Feeder
energies Article Plug-In Electric Bus Depot Charging with PV and ESS and Their Impact on LV Feeder Syed Muhammad Arif 1,*, Tek Tjing Lie 1 , Boon Chong Seet 1, Syed Muhammad Ahsan 2 and Hassan Abbas Khan 2 1 Department of Electrical and Electronic Engineering, Auckland University of Technology, Auckland 1010, New Zealand; [email protected] (T.T.L.); [email protected] (B.C.S.) 2 Department of Electrical Engineering, Lahore University of Management Sciences, Lahore 54792, Pakistan; [email protected] (S.M.A.); [email protected] (H.A.K.) * Correspondence: [email protected]; Tel.: +64-2181-3661 (ext. 9428) Received: 9 March 2020; Accepted: 19 April 2020; Published: 29 April 2020 Abstract: Plug-in electric buses (PEBs) are a promising alternative to conventional buses to provide a sustainable, economical, and efficient mode of transportation. However, electrification of public transportation leads to a phenomenon of peak load that impacts the stability of low voltage (LV) feeders. In this context, the effective integration of an energy storage system (ESS) and photovoltaic (PV) in a bus depot charging ecosystem can lead to i) peak load reduction and ii) charging cost reduction with low carbon emission. Therefore, a limited PEB charge scheduling algorithm is proposed for: i) bus depot operator (BDO) profit maximization and ii) grid stability enhancement considering the constraints of PEB charging and grids. A mixed integer linear programming (MILP) model for BDO profit maximization has been formulated and analyzed using IBM ILOG studio with CPLEX solver. Simulation has been performed for SkyBus electric fleet using real-world data such as actual bus arrival and departure schedules under diverse traffic, number of passengers, trip duration, daily load profile, solar radiation profile, and benchmark storage price. -

Electromagnetic Analysis and Simulation Aspects of Wireless Power Transfer in the Domain of Inductive Power Transmission Technology Lionel Pichon
Electromagnetic analysis and simulation aspects of wireless power transfer in the domain of inductive power transmission technology Lionel Pichon To cite this version: Lionel Pichon. Electromagnetic analysis and simulation aspects of wireless power transfer in the do- main of inductive power transmission technology. Journal of Electromagnetic Waves and Applications, Taylor & Francis, 2020, 34 (13), pp.1719-1755. 10.1080/09205071.2020.1799870. hal-02919639 HAL Id: hal-02919639 https://hal.archives-ouvertes.fr/hal-02919639 Submitted on 27 Oct 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution - NonCommercial| 4.0 International License Journal of Electromagnetic Waves and Applications ISSN: (Print) (Online) Journal homepage: https://www.tandfonline.com/loi/tewa20 Electromagnetic analysis and simulation aspects of wireless power transfer in the domain of inductive power transmission technology Lionel Pichon To cite this article: Lionel Pichon (2020) Electromagnetic analysis and simulation aspects of wireless power transfer in the domain of inductive power transmission technology, Journal of Electromagnetic Waves and Applications, 34:13, 1719-1755, DOI: 10.1080/09205071.2020.1799870 To link to this article: https://doi.org/10.1080/09205071.2020.1799870 © 2020 The Author(s). -

Optimal Design of Conductive and Inductive Charging System for Bus
2020 IEEE PES/IAS PowerAfrica Optimal design of conductive and inductive charging system for bus rapid transit network Adedayo Asaolu Stuart Galloway Electronic and Electrical Engineering Electronic and Electrical Engineering University of Strathclyde University of Strathclyde Glasgow, United Kingdom Glasgow, United Kingdom [email protected] [email protected] Abstract— This paper proposes a multi-terminal allocation of B. Binary Variables charging infrastructure for the public bus transit network that ∝�, ∝�, ∝ℎ: Binary variable for low, medium and high priority charging integrates both inductive and conductive priority charging to � Binary variable for inductive charging ensure energy management without disrupting the operational bus schedule. The charging model is formulated as a C. Indices mathematical optimisation problem that allocates multi- �, �, � Indices for terminal, BEB and terminal position priority chargers for the transit network. The formulated in the transit networks optimisation problem is solved using a particle swarm �, � Indices for time steps optimisation (PSO) algorithm. The model is validated using �, � Indices for transit network battery electric buses (BEBs) Lagos BRT data. The results indicate that the integration of both inductive and multi-terminal conductive priority chargers in the transit system can serve as an energy I. INTRODUCTION management system and eliminate charging dwell time. Generally, developed countries are planning, and Keywords— Battery-electric bus (BEB), conductive charger implementing schemes for reducing greenhouse gas inductive charger, PSO, Transit network. emissions, and the critical focus is the electrification of the transport system (both public and private vehicles). NOTATION However, in the developing countries, the electrification of public transport and transit network is probable to evolve A. -

Global Automotive Industry
connecting global wealth creators Consulate General of Israel INDO-ISRAELI Mumbai EXPLORING NEW VISTAS Vol. 1 Issue 3 BUSINESSJune - August 2010 Israel: A Centre of Excellence for the Global Automotive Industry Electric Cars on Israeli Roads by 2011 ! CASE STUDY s Founder Chairman Late Shri R.K. Prasad Distributed by: ssue New Media Communication Pvt. Ltd. IIn Thi in association with Consulate General of Israel, Mumbai Cover Story Managing Editor: Satya Swaroop Directors: B.K. Sinha Cdr. P.S. Amar 6 Group Editor: Dev Varam Israel: A Centre of Consulting Editors: Prabhuu Sinha, Md. Sabir Nishat, Tripat Oberoi Excellence for the Global Editors: Uday Tarra Nayar & Nicholas Automotive Industry Deputy Editors: Tripti Chakravorty & Neelima Meermira Assistant Editors: Prajwala Poojary & Subhajit Bhattacharya Head-Business Development: Veerendra Bhargava Israel: Hub of Strategic Advisor: Vinaya Shetty 10 Head - Admin & Finance: Sunil Kumar Liaison Officer: Vrunda Gurav Automotive Parts and Special Projects: Manjeet Bhawsar Executive Database: Madhavi Singh Outlook Technologies Circulation: Jawaharlal, Santosh Gangurde & Vijay Wangade Art Director: Santosh Nawar Associate Art Director: Sagar Banawalikar Visualizer: Maya Vichare Hi-tech Web Designer: Balwinder 12 Photographer: Bilal Ahmed Khan & Kishan Singh Breakthroughs at BRANCHES: Kolkata: BGN Technologies Research Anurag Sinha, Regional Head, Mob: 098300 43339 Email:[email protected] Pune: Jagdish Khaladkar, Regional Director, Israel to Mobile: 098230 38315 Email: [email protected] 15 Power Michigan Australia Office: Bandhana Kumari Prasad, 129 Camboon Road, News Automobiles Noranda, Perth, W.A. 6062 Tel: 0061 892757447 Email: [email protected] New Media Communication Pvt. Ltd., New Media House, 1 Akbar Villa, Near Old State Bank, Moral-Maroshi Road, Andheri (E), Mumbai - 400 059 Tel: +91-22-2925 0690. -

Multi-Lab EV Smart Grid Integration Requirements Study Providing Guidance on Technology Development and Demonstration T
Multi-Lab EV Smart Grid Integration Requirements Study Providing Guidance on Technology Development and Demonstration T. Markel and A. Meintz National Renewable Energy Laboratory K. Hardy, B. Chen, and T. Bohn Argonne National Laboratory J. Smart, D. Scoffield, and R. Hovsapian Idaho National Laboratory S. Saxena, J. MacDonald, and S. Kiliccote Lawrence Berkeley National Laboratory K. Kahl Oak Ridge National Laboratory R. Pratt Pacific Northwest National Laboratory NREL is a national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Operated by the Alliance for Sustainable Energy, LLC This report is available at no cost from the National Renewable Energy Laboratory (NREL) at www.nrel.gov/publications. Technical Report NREL/TP-5400-63963 May 2015 Contract No. DE-AC36-08GO28308 Multi-Lab EV Smart Grid Integration Requirements Study Providing Guidance on Technology Development and Demonstration T. Markel and A. Meintz National Renewable Energy Laboratory K. Hardy, B. Chen, and T. Bohn Argonne National Laboratory J. Smart, D. Scoffield, and R. Hovsapian Idaho National Laboratory S. Saxena, J. MacDonald, and S. Kiliccote Lawrence Berkeley National Laboratory K. Kahl Oak Ridge National Laboratory R. Pratt Pacific Northwest National Laboratory Prepared under Task No. VTP2.IN14 NREL is a national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Operated by the Alliance for Sustainable Energy, LLC This report is available at no cost from the National Renewable Energy Laboratory (NREL) at www.nrel.gov/publications. National Renewable Energy Laboratory Technical Report 15013 Denver West Parkway NREL/TP-5400-63963 Golden, CO 80401 May 2015 303-275-3000 • www.nrel.gov Contract No. -

Location Planning for Dynamic Wireless Charging Systems for Electric Airport Passenger Buses
energies Article Location Planning for Dynamic Wireless Charging Systems for Electric Airport Passenger Buses Stefan Helber 1,* ID , Justine Broihan 1 ID , Young Jae Jang 2 ID , Peter Hecker 3 ID and Thomas Feuerle 3 1 Department of Production Management, Leibniz Universitat Hannover, 30167 Hannover, Germany; [email protected] 2 Department of Industrial and Systems Engineering, Korea Advanced Institute of Science and Technology, 305-701 Daejeoen, Korea; [email protected] 3 Institute of Flight Guidance, Technische Universitat Braunschweig, 38118 Braunschweig, Germany; [email protected] (P.H.); [email protected] (T.F.) * Correspondence: [email protected]; Tel.: +49-51-1762-5650 Received: 13 December 2017; Accepted: 18 January 2018; Published: 23 January 2018 Abstract: The majority of the ground vehicles operating on the airside parts of commercial airports are currently powered by diesel engines. These include vehicles such as apron buses, fuel trucks, and aircraft tractors. Hence, these vehicles contribute to the overall CO2 emissions of the aviation transport system and thus negatively influence its environmental footprint. To reduce this damaging environmental impact, these vehicles could potentially be electrified with on-board batteries as their energy sources. However, the conductive charging of such vehicles via stationary cable connections is rather time-consuming. A dynamic wireless charging system to supply public transportation passenger buses with electric energy while in motion has recently been installed on the Korea Advanced Institute of Science and Technology (KAIST) campus and in the Korean city of Gumi. In this paper, we study configuration problems related to the use of this technology to make airport operations more environmentally sustainable. -

Expert Review Comments on the IPCC WGIII AR5 First Order Draft – Chapter 8
Expert Review Comments on the IPCC WGIII AR5 First Order Draft – Chapter 8 Comment Chapter From From To To Line Comment Response No Page Line Page 8893 8 When the authors will develop further this table then they should cover all transport modes Table will be revised for the Second- order Draft. 8897 8 This entire section could be condensed and some more attention on other transport modes besides road is This being worked upon with Ch 6 needed plus clearer links with 6.7 8895 8 How consistent are these scenarios with the transport scenarios from Chapter 6, section 6.7? This being worked upon with Ch 6 8896 8 How consistent are these scenarios with the transport scenarios from Chapter 6, section 6.7? This being worked upon with Ch 6 14296 8 Row 3 - "BFs displacing ... jet fuel", column "long-term possibilities" - correct that aviation is likely to be the most Agreed. Changed to 2020 to 2030. Will significant transport user of biofuels (given lack of alternatives unlike surface transport). However, "significant amend. adoption around 2020" is probably optimistic given need to develop options to scale. Analysis suggests that biofuels in aviation may become viable in early 2020s, with penetration ramping up through the 2020s and reaching more significant levels in the 2030s. See Committee on Climate Change (2011), "Bionergy Review", Chapter 4, p67 (http://downloads.theccc.org.uk.s3.amazonaws.com/Bioenergy/1463%20CCC_Bioenergy%20review_bookmarked _1.pdf). 14297 8 Row 10 - "MS by displacing plane trips through fast-rail alternatives", column "long-term possibilities" - only short- Disagree. -
Efficient Deployment Design of Wireless Charging Electric Tram System with Battery Management Policy
sustainability Article Efficient Deployment Design of Wireless Charging Electric Tram System with Battery Management Policy Young Dae Ko 1 and Yonghui Oh 2,* 1 Department of Hotel and Tourism Management, College of Hospitality and Tourism, Sejong University, 209, Neungdong-ro, Gwangjin-gu, Seoul 05006, Korea; [email protected] 2 Department of Industrial and Management Engineering, Daejin University, Pocheon 11159, Korea * Correspondence: [email protected]; Tel.: +82-31-539-2006 Received: 4 March 2020; Accepted: 3 April 2020; Published: 6 April 2020 Abstract: As an alternative to the environmental pollution problem of transportation means, the application of electric tram is considered in urban areas. However, due to the aesthetic problems occurs by the electric supply line for an electric tram, the wireless charging electric tram may be regarded as an alternative. It can be supplied electricity wirelessly from the wireless charging infrastructure installed on the railways even while moving. For a successful application, it is important to install and operate the overall systems with minimum investment cost. In this study, a mathematical model-based optimization technique, one of the methods of operations research, is adopted to derive the decision-making elements such as capacity and management of battery and allocation of the wireless charging infrastructure. Numerical example shows the optimal capacity and management of battery for a wireless charging electric tram and the ideal installation locations of the wireless charging infrastructures. Keywords: mathematical model; wireless charging; battery capacity; battery management; wireless charging infrastructure; regenerative braking 1. Introduction In order to prevent environmental pollution, electric transportation is considered as an alternative to the existing internal combustion engine transportation.