Williams Honors College, Honors Research Project Title Page
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Enhancing Skateboarding Experience
MusiSkate: Enhancing Skateboarding Experience Part 4: Interface Evaluation & Design Team Name: The Crowdsourcerers Xiaowei (Ivy) Chen 903 143688 Sarthak Ghosh 903 048253 Lorina Navarro 903 145502 Pratik Shah 903 038262 Table of Contents Introduction Methodology Heuristic Evaluation Usability Testing Results and Analysis Freestyle Tricks for Tracks Overall comparison Rationale for Analysis methods Quantitative Analysis Qualitative analysis Design Changes Tricks for Tracks Freestyle Appendix 1 - Usability Study Script Appendix 2 - Evaluation Forms for Usability Study Appendix 3 - Screener Questions for the Usability Study Bibliography Introduction In this project, we wish to explore ways to encourage intermediate skaters to gain more skills by enhancing the skateboarding experience through rich audio feedback. Our target demographic are intermediate skaters, who have at least 1-5 years of skating experience. During our user research, we found out that learning how to skate can be significantly challenging for beginners. There are two aspects of learning that we uncovered that is relevant for skating: (a) learning by doing and (b) play. “Learning by doing” refers to the practice of trial-and-error, repetition and “feel” (e.g., experiencing the equipment) and watching others. “Play” refers to the feelings of “adrenaline rush”, control, “intrinsic interest” [1] and the creative process of performing tricks and exploiting affordances in their immediate environments. After weighing three design alternatives, our group decided to proceed with the concept “MusiSkate”, a skateboard that provides real-time musical feedback to pre-defined skating movements. This solution has the advantage of enhancing the user experience of skating through rich audio feedback, something that is demonstrated in other research [2]. -

Jackson Allen Matt Maunder Anne-Flore Marxer Mark Meddows Ryan Wilson Tristan Still Nathan Gamble King of the Rail James Catto Lukas Huffman Jess Gibson
Jackson Allen Matt Maunder Anne-Flore Marxer Mark Meddows Ryan Wilson Tristan Still Nathan Gamble King of the Rail James Catto Lukas Huffman Jess Gibson FREE enquiries (02) 9935-9090 POP4 Burton.indd 1-2 23/10/06 1:48:09 PM People 34 Tristan Still Tristan is quite the resourceful photographer. Besides tracking down one of only a handful of large format Polaroid cameras and bringing it to Sydney, he’s also got plans to modify a 20”x24” home built pin-hole camera to shoot skateboarding. 54 Anne-Flore Marxer & 50 Jackson Allen Transworld Rookie of The Year, Ms. Superpark and a bangin’ part in Ro Sham Bo; Anne-Flore seems to have it pretty figured out. She gives us the low-down on being a female rider in a male dominated sport and her love of American food. Meanwhile, Mark Catsburg catches up with Jackson Allen and asks him a load of questions about what its like to be a ’Jackson.’ 60 Ryan Wilson & 64 Mark Meddows After last chair. Mt Hotham, Victoria. Ryan Wilson is living the dream. We caught up with him between New York, Sydney and his Photo: Sam Chisholm. hometown in New Zealand to get all the deets on hanging out with the DC Team and skating in Australia. Mark Meddows is on the other end of the skateboarding scale, he’s about to get married and prefers to keep it pretty low key. 48 James Catto Not your average surfer, Catto has got an attitude and style all of his own. We catch up with him to find out what its like to be a Free Surfer. -

Univerzita Pardubice Fakulta Filozofická Skateboarding Jako Sport
Univerzita Pardubice Fakulta filozofická Skateboarding jako sport a životní styl z pohledu insidera Dominik Mudruňka Bakalářská práce 2017 Prohlašuji: Tuto práci jsem vypracoval samostatně. Veškeré literární prameny a informace, které jsem v práci využil, jsou uvedeny v seznamu použité literatury. Byl jsem seznámen s tím, že se na moji práci vztahují práva a povinnosti vyplývající ze zákona č. 121/2000 Sb., autorský zákon, zejména se skutečností, že Univerzita Pardubice má právo na uzavření licenční smlouvy o užití této práce jako školního díla podle § 60 odst. 1 autorského zákona, a s tím, že pokud dojde k užití této práce mnou nebo bude poskytnuta licence o užití jinému subjektu, je Univerzita Pardubice oprávněna ode mne požadovat přiměřený příspěvek na úhradu nákladů, které na vytvoření díla vynaložila, a to podle okolností až do jejich skutečné výše. Souhlasím s prezenčním zpřístupněním své práce v Univerzitní knihovně. V Pardubicích dne 30. 8. 2017 Dominik Mudruňka Poděkování: Především bych rád věnoval poděkování PhDr. Adamu Horálkovi, PhD. za cenné rady a čas, který mi věnoval. Dále poděkování patří všem respondentům za poskytnuté informace a možný sběr audiovizuálního materiálu. Děkuji. Název: Skateboarding jako sport a životní styl z pohledu insidera Anotace: Tato bakalářská práce se zabývá skateboardingem skrze oblast společenských věd. Obsahem je též představení skateboardingu a jeho historie od vzniku až po současnost. Hlavním cílem je zjistit, co může pro člověka znamenat skateboarding. Práce tak prostřednictvím perspektivy subkultur, sportu a životního stylu zachycuje určité znaky, které jsou příznačné pro lidi, co se skateboardingu věnují. Zjištění se nedotýkají jen čistě vizuálních znaků, ale také názorů, hodnot a motivací, které jsou mimo samotný text obsažené i v audiovizuálním díle, jež je součástí této práce. -

John Aldrich Address
MK SKATE Transcript Reference: Accession Ref: Name: John Aldrich Address: Year of Birth: 1988 Place of Birth: Date of Interview: 3rd August 2019 Interviewed by: Melanie Jeavons Duration: 00:40:19 00:00:14 When did you first encounter skateboarding? Funnily enough, it was actually at the bus station. I remember when I was going on a camping trip with the Beavers, or something like that, when I was well young and I just remember getting in trouble ‘cause I was like running around on the ledges and stuff and they were like: “Man, you need to get out of the way.” And, yeah, I was just getting in everyone’s way and it was just like...yeah, I was a bit of a nuisance really, that sort of...yeah, I guess that was probably the first time I ever even seen it. I remember then going past on the buses and seeing it all there and stuff and, yeah, it was really cool. A few of my friends, like at school and that when I was younger, but yeah, I hadn’t delved into the world of skateboarding yet. But yeah, it was pretty cool, but then...I suppose...well, I start...my first skateboard I ever got was an American one – my mum bought it for me. Me and my brother, we both had skateboards but I wasn’t really into it at the time and I didn’t have black griptape so that really like bugged me, so I didn’t want to use my board. And my next-door neighbour like, Lou and Dave [who...I don’t know, they skated around in Bletchley and, yeah, they used to have everyone go to their house and all skate out the front and that and I used to be a bit embarrassed to like go out on my rubbish board. -

How to Manual in Skateboard
How to manual in skateboard click here to download How to Manual on a Skateboard. A manual is type of freestyle skateboarding trick that's very similar to a "wheelie" on a bike. To perform a manual, you shift your. Learning to manual on your skateboard isn't all that hard; it just takes balance and lots of practice. Learn how to do a manual with this tutorial. This is a web tutorial for Manual a skateboarding trick in which you keep going only with back wheels. It comes with understandable movie and image. How to Manual on a skateboard. A balance in which you ride on both rear wheels, with your front wheels raised off the ground. This trick is best practiced on a. Check out Simons skateboarding trick tips and other help for beginning skateboarders. Learn how to ollie, kickflip, heelflip, manual as well as other skate tricks. Manual. Manual - aka a wheelie. Rolling on the back two wheels of the skateboard. A fun trick that requires a lot of balance. Hold the manual as long as you can. manual trick tip, learn how to manual. The manual or wheely is a balance trick where you ride on your back wheels for as long . Learn to skateboard Manual. In One Foot Manuals the rider places one foot parallel to the board and balances on the nose or tail. A Manual in which both feet are. im doing photo shoot in front of the store where i need to gap to the street and www.doorway.ru the heck do i manual? Recently i've gotten a sudden urge to do manual tricks because they look really cool to me. -

An Ethnolexicography of the Skateboarding Subculture
AN ETHNOLEXICOGRAPHY OF THE SKATEBOARDING SUBCULTURE By HO’OMANA NATHAN HORTON Bachelor of Arts in English Oklahoma Wesleyan University Bartlesville, OK 2013 Master of Arts in English Oklahoma State University Stillwater, OK 2015 Submitted to the Faculty of the Graduate College of the Oklahoma State University in partial fulfillment of the requirements for the Degree of DOCTOR OF PHILOSOPHY July, 2020 AN ETHNOLEXICOGRAPHY OF THE SKATEBOARDING SUBCULTURE Dissertation Approved: Dennis R. Preston Adviser Carol Moder Chair Nancy Caplow G. Allen Finchum ii ACKNOWLEDGEMENTS This work is dedicated to the memory of my grandfather, Hershall "Jigger" Horton, a true craftsman, who taught me that there are so many important, valuable skills and tools that can’t be learned in a classroom alone. And to Mrs. Carol Preston, the most welcoming and genuine person I think I've ever known, who always kept my desk well- stocked with humanitarian literature, and who cared so sincerely about everyone she met, and taught me to care for people and our planet more deeply every day. First and foremost, I want to thank my adviser, Dr. Dennis Preston, whose encouragement and mentorship have fueled this project from the start. When I started graduate school, I don't think I would ever have imagined I'd be writing a dissertation about skateboarding, but your genuine interest in this topic, and all that you've done to help me go beyond description and into a deeper understanding of language and society have enabled this work. I thank you also for bringing me on as a lab assistant in 2014 when I was just a grungy little skater with very little idea of what I was doing in academia. -

Konstruksi Makna Happen Skateboarding Magazine Sebagai Media Komunikasi Bagi Komunitas Lampung Skateboard Division (LSD) Di Bandar Lampung
Jurnal Ilmiah Komunikasi / Volume 3 / Nomor 2 Desember 2014 Konstruksi Makna Happen Skateboarding Magazine sebagai Media Komunikasi bagi Komunitas Lampung Skateboard Division (LSD) di Bandar Lampung Ade Nur Istiani1 Abstrak Komunitas skateboard yang merupakan kelompok sosial tertentu yang memiliki kekhasan dalam membentuk gaya hidupnya. Komunitas ini menggunakan majalah komunitas Happen Skateboarding Magazine sebagai sarana interaksi antar anggota. Tujuan penelitian ini adalah untuk menggambarkan cara berpenampilan pada komunitas skateboard, gaya bahasa atau istilah-istilah yang digunakan dalam berkomunikasi pada komunitas skateboard dan pemahaman tentang skateboard bagi komunitas skateboard yang didapat dari Happen Skateboarding Magazine dalam perspektif teori interaksionisme simbolik. Penelitian ini menggunakan tipe penelitian deskriptif kualitatif dengan tradisi studi kasus dan teknik pengumpulan data berupa wawancara mendalam , observasi, dokumentasi, dan studi kepustakaan. Informan dalam penelitian ini adalah komunitas Lampung Skateboard Division/LSD di Bandar Lampung dengan teknik purposive sampling (disengaja). Teknik analisis data dalam penelitian ini menggunakan teknik reduksi data, display dan verifikasi. Hasil penelitian ini menunjukkan bahwa Komunitas Lampung Skateboard Divison (LSD) memaknai skateboard sebagai sarana interaksi serta ajang tempat mengekspresikan diri yang memberikan ruang bagi anggota komunitas skateboard yang berbeda daerah untuk saling bertukar pendapat dan makna sehingga tercipta suatu pemahaman yang sama tentang skateboard. Kata kunci : Gaya Hidup Komunitas, Majalah Komunitas, Komunitas Skateboard. 1 Dosen pada Jurusan Ilmu Komunikasi FISIP Universitas Lampung. Dapat dihubungi di [email protected] 88 Ade Nur Istiani Konstruksi Makna Happen Skateboarding Magazine sebagai Media Komunikasi bagi Komunitas Lampung Skateboard Division (LSD) di Bandar Lampung Volume 3 / Nomor 2 / Desember 2014 Konteks Penelitian secara tidak langsung menggunakan Ilmu komunikasi, dewasa ini media (Uchjana, 2004). -

'Trendy Business Ideas 2013' Report
TRENDY BUSINESS IDEAS 2013ssss The Easy Guide to 50 Up-and-Coming Business Ideas and Trends Of The Year Trendy Business Ideas Report 2013 ■□▪▫○●□■ TRENDY BUSINESS IDEAS 2013 COOLBUSINESSIDEAS.COM'S NEW BUSINESS IDEAS AND INNOVATIONS REPORT This free report is brought to you by CoolBusinessIdeas.com Copyright © 2014 CoolBusinessIdeas.com. You may distribute this document freely provided that it is no modified or altered in any way. Disclaimer: The authors of this report tried to present the most accurate information to their knowledge at the time of writing. The authors of this book shall not be held responsible for any kind of losses or damages caused by its use and implementation. 2 Trendy Business Ideas Report 2013 TRENDY BUSINESS IDEAS 2013 CBI’s NEW BUSINESS IDEAS AND INNOVATIONS REPORT The world is changing and evolving quickly. You can’t afford to play catch-up. As an aspiring entrepreneur and business owner, you’ve got to be ahead of the competition. You have to be keenly aware of the major business ideas, news and trends shaping the future of business and industry. Be in the know by reading this easy guide to some of the most trendy business ideas of the past year in 2013. Let us be your eyes and ears as you go on the hunt for the newest business ideas and trends which could potentially be the next disruptive force in your business. Serving as your boots on the ground, we have roamed the globe virtually for fifty cool business ideas and tips so that you can keep up and thrive in today’s ever- changing landscape. -

Milan Shah Thakuriaka.Pagal Chora
INTERVIEW WITH OUR TEAM RIDER Milan Shah Thakuri aka. Pagal Chora INTERVIEW Milan Shah thakuri aka. Pagal Chora Milan shah is A 19 year old up and coming street ripper from nepal. After his skatelife began at 17 his level of progression has flourished due only to his sheer love for being on the board. We called him up for a brief phone interview to find out more about his life. where he has come from and what he hopes to achieve as a skateboarder from Nepal. Hello? and his families have come down to play both because my height was Is this Milan? Yes. ktm cause of that). My big sister is in small. But in Both Junior & Senior I How are you bro? Im good bro. Malaysia and my second sister has a would get high score, my name would flight after 3 days for Japan. My dad come in a newspaper Milan shah What are you up to? has taken a lot of loan to send the jersey no 5 from this school from this Just chilling man. sisters abroad, Because of that loan a tournament. Didn’t get any certificate lot of the problems are arising in the but my name came in the newspaper We don’t know a lot about you man. family. We have one House that is also quite a few times. The Milan that we see today im sure in Bank Loan and I am the only Son. there is a story behind him. What is when I was studying in 10th standard, his background? What did he do before Now I’m 20 bro, I cleared My 12 I knew how to dance. -
Skate 2 Xbox 360 Instruction Manual
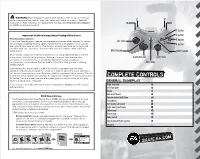
WARNING Before playing this game, read the Xbox 360® Instruction Manual and any peripheral manuals for important safety and health information. Keep all LT RT manuals for future reference. For replacement manuals, see www.xbox.com/support LB RB or call Xbox Customer Support. Y button Important Health Warning About Playing Video Games X button Photosensitive seizures B button A very small percentage of people may experience a seizure when exposed to certain left stick visual images, including flashing lights or patterns that may appear in video games. A button Even people who have no history of seizures or epilepsy may have an undiagnosed condition that can cause these “photosensitive epileptic seizures” while watching video games. BACK button START button These seizures may have a variety of symptoms, including lightheadedness, altered vision, eye or face twitching, jerking or shaking of arms or legs, disorientation, directional pad right stick confusion, or momentary loss of awareness. Seizures may also cause loss of consciousness or convulsions that can lead to injury from falling down or striking Xbox Guide nearby objects. Immediately stop playing and consult a doctor if you experience any of these symptoms. Parents should watch for or ask their children about the above symptoms— children and teenagers are more likely than adults to experience these seizures. The risk of photosensitive epileptic seizures may be reduced by taking the following precautions: Complete Controls Sit farther from the screen; use a smaller screen; play in a well-lit room; do not play when you are drowsy or fatigued. General Gameplay If you or any of your relatives have a history of seizures or epilepsy, consult a doctor Right foot push A before playing. -

Kompetenzentwicklung Im Sport Anhand Des Beispiels Skateboarding
Kompetenzentwicklung im Sport anhand des Beispiels Skateboarding Diplomarbeit Zur Erlangung des akademischen Grades eines Magisters der Naturwissenschaften an der Karl-Franzens-Universität Graz vorgelegt von: Sebastian Schoberer bei Mag. Dr.phil. Gerald Payer (Begutachter) am Institut für Sportwissenschaft Graz, im Mai 2020 Kurzzusammenfassung Eidesstattliche Erklärung Ich, Sebastian Schoberer, erkläre hiermit ehrenwörtlich, die vorgelegte Diplomarbeit ohne fremde Hilfe und unter ausschließlicher Verwendung der angeführten Literatur verfasst zu haben. Die Arbeit wurde bisher nicht veröffentlicht und auch nicht in gleicher oder ähnlicher Form einer anderen Prüfungsbehörde vorgelegt. Die eingereichte elektronische Version entspricht der hier vorliegenden Fassung. _____________________ ______________________________ Ort, Datum Unterschrift (Sebastian Schoberer) ii Kurzzusammenfassung Kurzzusammenfassung Die vorliegende Arbeit behandelt als zentrales Thema die jugendkulturelle Sportart Skateboarding und befasst sich mit der Frage, wie das Miteinbeziehen dieser in den Sportunterricht in der Sekundarstufe II an österreichischen Schulen, die Kompetenzentwicklung von Schülerinnen und Schülern fördert. Der erste Teil der Arbeit beinhaltet den theoretischen Hintergrund des Skateboarding. Dieser setzt sich aus der geschichtlichen Entwicklung des Sports, einer Erklärung des Sportgeräts, einem Eingliederungsversuch der Bewegungsform, soziokulturellen Informationen und einer Beschreibung der prominentesten Disziplinen zusammen. Im zweiten Teil der -

Skate Church Document
a 52 week Bible study. written by skaters. for skaters. The following 52 devotions have been provided through a collaborative effort between 52 individuals from around the world, all seeking to create a shared resource that could be used, owned, and reproduced by any organization, church, or ministry. every skater. every park. everywhere. We would like to encourage you to use this document, duplicate, and make it yours. There are an estimated 9,600+ public skateparks worldwide. Over 3,000 of those parks are in the United States. Our mission is to inspire a M O V E M E N T where Christians globally that have a love for Jesus and a passion for skateboarding recognize the mission field that exists right in their backyard. This is Skate Church Movement. learn more at skatechurchmovement.com 52 devotions written by skaters. for skaters. why? the Christian life 4 why were we created? 56 counting the cost. 6 why search for truth? 58 how to live as Christ. 8 the meaning of life. 60 not of the world. 62 love God. love people. the Bible 64 you are a new creation. 66 don't be a poser. 10 what is the Bible? 12 can the Bible be trusted? prayer 14 is Scripture still relevant? 16 how do we study the Bible? 68 what is prayer? 70 why do we pray? God 72 how should we pray? 74 does God listen? 18 who is God? 20 the character of God. the church 22 what is the trinity? 24 comparing God to us.