Fast Differential-Geometric Methods for Continuous Muscle Wrapping
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Intimations Surnames
Intimations Extracted from the Watt Library index of family history notices as published in Inverclyde newspapers between 1800 and 1918. Surnames H-K This index is provided to researchers as a reference resource to aid the searching of these historic publications which can be consulted on microfiche, preferably by prior appointment, at the Watt Library, 9 Union Street, Greenock. Records are indexed by type: birth, death and marriage, then by surname, year in chronological order. Marriage records are listed by the surnames (in alphabetical order), of the spouses and the year. The copyright in this index is owned by Inverclyde Libraries, Museums and Archives to whom application should be made if you wish to use the index for any commercial purpose. It is made available for non- commercial use under the Creative Commons Attribution-Noncommercial-ShareAlike International License (CC BY-NC-SA 4.0 License). This document is also available in Open Document Format. Surnames H-K Record Surname When First Name Entry Type Marriage HAASE / LEGRING 1858 Frederick Auguste Haase, chief steward SS Bremen, to Ottile Wilhelmina Louise Amelia Legring, daughter of Reverend Charles Legring, Bremen, at Greenock on 24th May 1858 by Reverend J. Nelson. (Greenock Advertiser 25.5.1858) Marriage HAASE / OHLMS 1894 William Ohlms, hairdresser, 7 West Blackhall Street, to Emma, 4th daughter of August Haase, Herrnhut, Saxony, at Glengarden, Greenock on 6th June 1894 .(Greenock Telegraph 7.6.1894) Death HACKETT 1904 Arthur Arthur Hackett, shipyard worker, husband of Mary Jane, died at Greenock Infirmary in June 1904. (Greenock Telegraph 13.6.1904) Death HACKING 1878 Samuel Samuel Craig, son of John Hacking, died at 9 Mill Street, Greenock on 9th January 1878. -

JM Coetzee and Mathematics Peter Johnston
1 'Presences of the Infinite': J. M. Coetzee and Mathematics Peter Johnston PhD Royal Holloway University of London 2 Declaration of Authorship I, Peter Johnston, hereby declare that this thesis and the work presented in it is entirely my own. Where I have consulted the work of others, this is always clearly stated. Signed: Dated: 3 Abstract This thesis articulates the resonances between J. M. Coetzee's lifelong engagement with mathematics and his practice as a novelist, critic, and poet. Though the critical discourse surrounding Coetzee's literary work continues to flourish, and though the basic details of his background in mathematics are now widely acknowledged, his inheritance from that background has not yet been the subject of a comprehensive and mathematically- literate account. In providing such an account, I propose that these two strands of his intellectual trajectory not only developed in parallel, but together engendered several of the characteristic qualities of his finest work. The structure of the thesis is essentially thematic, but is also broadly chronological. Chapter 1 focuses on Coetzee's poetry, charting the increasing involvement of mathematical concepts and methods in his practice and poetics between 1958 and 1979. Chapter 2 situates his master's thesis alongside archival materials from the early stages of his academic career, and thus traces the development of his philosophical interest in the migration of quantificatory metaphors into other conceptual domains. Concentrating on his doctoral thesis and a series of contemporaneous reviews, essays, and lecture notes, Chapter 3 details the calculated ambivalence with which he therein articulates, adopts, and challenges various statistical methods designed to disclose objective truth. -

The Fessard's School of Neurophysiology After
The fessard’s School of neurophysiology after the Second World War in france: globalisation and diversity in neurophysiological research (1938-1955) Jean-Gaël Barbara To cite this version: Jean-Gaël Barbara. The fessard’s School of neurophysiology after the Second World War in france: globalisation and diversity in neurophysiological research (1938-1955). Archives Italiennes de Biologie, Universita degli Studi di Pisa, 2011. halshs-03090650 HAL Id: halshs-03090650 https://halshs.archives-ouvertes.fr/halshs-03090650 Submitted on 11 Jan 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. The Fessard’s School of neurophysiology after the Second World War in France: globalization and diversity in neurophysiological research (1938-1955) Jean- Gaël Barbara Université Pierre et Marie Curie, Paris, Centre National de la Recherche Scientifique, CNRS UMR 7102 Université Denis Diderot, Paris, Centre National de la Recherche Scientifique, CNRS UMR 7219 [email protected] Postal Address : JG Barbara, UPMC, case 14, 7 quai Saint Bernard, 75005, -

Missouri State Archives Finding Aid 5.20
Missouri State Archives Finding Aid 5.20 OFFICE OF SECRETARY OF STATE COMMISSIONS PARDONS, 1836- Abstract: Pardons (1836-2018), restorations of citizenship, and commutations for Missouri convicts. Extent: 66 cubic ft. (165 legal-size Hollinger boxes) Physical Description: Paper Location: MSA Stacks ADMINISTRATIVE INFORMATION Alternative Formats: Microfilm (S95-S123) of the Pardon Papers, 1837-1909, was made before additions, interfiles, and merging of the series. Most of the unmicrofilmed material will be found from 1854-1876 (pardon certificates and presidential pardons from an unprocessed box) and 1892-1909 (formerly restorations of citizenship). Also, stray records found in the Senior Reference Archivist’s office from 1836-1920 in Box 164 and interfiles (bulk 1860) from 2 Hollinger boxes found in the stacks, a portion of which are in Box 164. Access Restrictions: Applications or petitions listing the social security numbers of living people are confidential and must be provided to patrons in an alternative format. At the discretion of the Senior Reference Archivist, some records from the Board of Probation and Parole may be restricted per RSMo 549.500. Publication Restrictions: Copyright is in the public domain. Preferred Citation: [Name], [Date]; Pardons, 1836- ; Commissions; Office of Secretary of State, Record Group 5; Missouri State Archives, Jefferson City. Acquisition Information: Agency transfer. PARDONS Processing Information: Processing done by various staff members and completed by Mary Kay Coker on October 30, 2007. Combined the series Pardon Papers and Restorations of Citizenship because the latter, especially in later years, contained a large proportion of pardons. The two series were split at 1910 but a later addition overlapped from 1892 to 1909 and these records were left in their respective boxes but listed chronologically in the finding aid. -
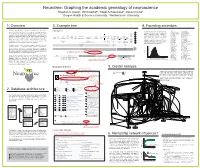
1. Overview 2. Database Architecture 3. Example Tree 6. Mentorship Network Influences?
Neurotree: Graphing the academic genealogy of neuroscience Stephen V. David1, Will Chertoff1, Titipat Achakulvisut2, Daniel Acuna2 1Oregon Health & Science University, 2Northwestern University 1. Overview 3. Example tree 4. Founding ancestors Neurotree (http://neurotree.org, [1]) is a collaborative, open-access Name N Resarch area Family tree The distance between two nodes can be Johannes Müller 7715 Physiology website that tracks and visualizes the academic genealogy and history P+ William Fitch measured by the number of mentorship Sir Charles Sherrington 4758 Neurophysiology of neuroscience. After 10 years of growth driven by user-generated Allen Hermann von Helmholtz 3048 Psychophysics University of P- steps connecting them through a Sir John Eccles 2998 Synapses content, the site has captured information about the mentorship of over Rudolf Oregon Ludwig Robert Samuel Alexander Sir Charles Medical common ancestor i(below). The list at Karl Lashley 2558 Learning and memory 80,000 neuroscientists. It has become a unique tool for a community of John Friedrich Karl Koch Sir Charles Kinnier Charles Gordon John Scott Sir Charles Harvey Sir Charles Karl Edgar School C+ Louis Agassiz 2241 Anatomy Sir Michael Newport Goltz Virchow Universität Scott Wilson Symonds Holmes Farquhar Sherrington Scott Williams Scott Spencer Wilder Douglas Frederic right shows the 30 most frequent primary researchers, students, journal editors, and the press. Once Foster Langley Kaiser-Wilhelms- Universität Berlin (ID Sherrington National Hospital, Queen National -

The Fessard's School of Neurophysiology After the Second
Archives Italiennes de Biologie, 149 (Suppl.): 187-195, 2011. The fessard’s School of neurophysiology after the Second World War in france: globalisation and diversity in neurophysiological research (1938-1955) J.-G. BARBARA Université Pierre et Marie Curie, Paris, Centre National de la Recherche Scientifique, CNRS UMR 7102; Université Denis Diderot, Paris, Centre National de la Recherche Scientifique, CNRS UMR 7219 ABSTRACT In France, neurophysiology emerged after the Second World War as a dynamic discipline in different schools, Toulouse, Lyons, Montpellier, Marseilles, and Paris, where Lapicque was losing credit with his studies on the excitability of nerves. Parisian neurophysiologist, Alfred Fessard (1900-1982) was a key figure in establishing a new school of neurophysiology on the model of Edgar Adrian’s department in Cambridge, where he worked for a few months in the late thirties. Fessard was initially a student of Henri Piéron involved in experimental psychology. He also made parallel oscillographic studies on elementary activities in various animal and plant preparations. His school trained leading French neurophysiologists in Paris until recently and Fessard was instrumental in the creation of IBRO in 1961. Key words Neurophysiology • France • Fessard • IBRO • Torpedo fish • Chemical neurotransmission After the Second World War, major French figures Marey suggested the creation of an International in neurophysiology emerged from different tradi- Commission for the control of graphical instruments tions in Toulouse, Lyons Montpellier, Strasburg, devoted to physiology. A new cottage named Institut Marseilles, and Paris. Alfred Fessard (1900-1982) is Marey was built near the Physiological Station recognized today as a most talented neurophysiolo- Marey had planned for his studies on movement in gist in the 1940s and 1950s who was able to create Boulogne-Billancourt, Le Parc des Princes, near his own school near Paris, in the former Institut Paris. -

Development of a Hill-Type Muscle Model with Fatigue for the Calculation of the Redundant Muscle Forces Using Multibody Dynamics
2 cm 2 cm Development of a Hill-Type Muscle Model With Fatigue for the Calculation of the Redundant Muscle Forces using Multibody Dynamics ANDRÉ FERRO PEREIRA Dissertação para obtenção do Grau de Mestre em ENGENHARIA BIOMÉDICA Júri Presidente: Prof. Helder Carriço Rodrigues Orientador: Prof. Miguel Pedro Tavares da Silva Prof. Mamede de Carvalho Vogais: Prof. Jorge Manuel Mateus Martins Prof. João Nuno Marques Parracho Guerra da Costa Outubro 2009 ii Resumo O objectivo deste trabalho é o desenvolvimento de um modelo muscular versátil e a sua implementação de forma robusta e eficiente num código de dinâmica de sistemas multicorpo com coordenadas naturais. São considera- dos dois tipos de modelos: o primeiro é um modelo muscular do tipo Hill que simula o comportamento das estruturas contrácteis, tanto para análises em dinâmica directa como inversa. O segundo é um modelo dinâmico de fadiga muscular que toma em consideração o historial de cada músculo, em termos de força produzida, estimando o seu nível de aptidão física usando um mod- elo multi-compartimentar triplo e a hierarquia de recrutamento muscular. A formulação para as equação do movimento é adaptada, de forma a incluir os modelos descritos, através do método de Newton. Isto permitirá, numa perspectiva de dinâmica directa, que se proceda ao cálculo da cinemática do sistema mecânico resultante para determinadas activações musculares previ- amente conhecidas, ou, numa perspectiva de dinâmica inversa, a computação das activações musculares necessárias para provocarem um movimento artic- ular prescrito. Para ambas estas formulações, os sistemas são redundantes, uma propriedade que é ultrapassada no segundo caso usando um algoritmo de optimização. -

An Efficient Muscle Fatigue Model for Forward and Inverse Dynamic Analysis of Human Movements
Available online at www.sciencedirect.com Procedia IUTAM 2 (2011) 262–274 2011 Symposium on Human Body Dynamics An efficient muscle fatigue model for forward and inverse dynamic analysis of human movements Miguel T. Silva*, André F. Pereira, Jorge M. Martins Biomechatronics Research Group IDMEC/ISTಣInstituto Superior Técnico, Technical University of Lisbon, Portugal Abstract The aim of this work is to present the integration of a simple and yet efficient dynamic muscle fatigue model in a multibody formulation with natural coordinates. The fatigue model considers the force production history of each muscle to estimate its fitness level by means of a three-compartment theory approach. The model is easily adapted to co-operate with standard Hill-type muscle models, allowing the simulation and analysis of the redundant muscle forces generated in the presence of muscular fatigue. This has particular relevance in the design of orthotic devices to support human locomotion and manipulation. © 2011 Published by Elsevier Ltd. Peer-review under responsibility of John McPhee and József Kövecses Keywords: Redundant muscle forces; Muscular fatigue model; Hill-type muscle model; Natural coordinates; Forward dynamics; Inverse Dynamics 1. Introduction Computational simulation and analysis of the human movement is becoming a fundamental tool in many medical and biomedical applications, providing accurate quantitative results that can be used to support medical decision and diagnosis or in the integrated design of ortho-prosthetic devices for manipulation and locomotion [1,2]. In particular, multibody dynamics methodologies have emerged and rapidly evolved through the last decades as an accurate and well adapted computational technique, naturally fitted to deal with the dynamics of biomechanical systems, due to their unique characteristic of allowing the calculation of complex biomechanical data in a non-invasive way [3,4]. -

Contributions of Civilizations to International Prizes
CONTRIBUTIONS OF CIVILIZATIONS TO INTERNATIONAL PRIZES Split of Nobel prizes and Fields medals by civilization : PHYSICS .......................................................................................................................................................................... 1 CHEMISTRY .................................................................................................................................................................... 2 PHYSIOLOGY / MEDECINE .............................................................................................................................................. 3 LITERATURE ................................................................................................................................................................... 4 ECONOMY ...................................................................................................................................................................... 5 MATHEMATICS (Fields) .................................................................................................................................................. 5 PHYSICS Occidental / Judeo-christian (198) Alekseï Abrikossov / Zhores Alferov / Hannes Alfvén / Eric Allin Cornell / Luis Walter Alvarez / Carl David Anderson / Philip Warren Anderson / EdWard Victor Appleton / ArthUr Ashkin / John Bardeen / Barry C. Barish / Nikolay Basov / Henri BecqUerel / Johannes Georg Bednorz / Hans Bethe / Gerd Binnig / Patrick Blackett / Felix Bloch / Nicolaas Bloembergen -
The Willpower Instinct
Recommended by ECI Recommended by ECI Recommended by ECI Table of Contents Title Page Copyright Page Dedication Epigraph Introduction ONE - I Will, I Won’t, I Want: What Willpower Is, and Why It Matters TWO - The Willpower Instinct: Your Body Was Born to Resist Cheesecake THREE - Too Tired to Resist: Why Self-Control Is Like a Muscle FOUR - License to Sin: Why Being Good Gives Us Permission to Be Bad FIVE - The Brain’s Big Lie: Why We Mistake Wanting for Happiness SIX - What the Hell: How Feeling Bad Leads to Giving In SEVEN - Putting the Future on Sale: The Economics of Instant Gratification EIGHT - Infected! Why Willpower Is Contagious NINE - Don’t Read This Chapter: The Limits of “I Won’t” Power TEN - Final Thoughts Acknowledgements NOTES INDEX Recommended by ECI Published by the Penguin Group Penguin Group (USA) Inc., 375 Hudson Street, New York, New York 10014, USA • Penguin Group (Canada), 90 Eglinton Avenue East, Suite 700, Toronto, Ontario M4P 2Y3, Canada (a division of Pearson Penguin Canada Inc.) • Penguin Books Ltd, 80 Strand, London WC2R 0RL, England • Penguin Ireland, 25 St Stephen’s Green, Dublin 2, Ireland (a division of Penguin Books Ltd) • Penguin Group (Australia), 250 Camberwell Road, Camberwell, Victoria 3124, Australia (a division of Pearson Australia Group Pty Ltd) • Penguin Books India Pvt Ltd, 11 Community Centre, Panchsheel Park, New Delhi–110 017, India • Penguin Group (NZ), 67 Apollo Drive, Rosedale, North Shore 0632, New Zealand (a division of Pearson New Zealand Ltd) • Penguin Books (South Africa) (Pty) Ltd, 24 Sturdee Avenue, Rosebank, Johannesburg 2196, South Africa Penguin Books Ltd, Registered Offices: 80 Strand, London WC2R 0RL, England Copyright © 2012 by Kelly McGonigal, Ph.D. -

Medicina Militar ?Ot: Revista De Sanidad De Las Fuerzas Armadas De España T’
REVISTA DE SANIDAD DE LAS FUERZAS ARMADAS DE ESPAÑA N. -d W / 4/__/ ‘ e,1 Volumen 59 • N.° 2 2003 Año CL ANIVERSARIO DEL NACIMIENTO DE RAMÓN Y CAJAL Jornada conmemorativa en el Instituto de Medicina Preventiva “Capitán Médico Ramón y Cajal”. 18 de junio de 2002 3 Editorial. El ejemplo de Cajal. A. Pérez Peña, 5 Historia del Instituto de Medicina Preventiva del E. T. “Capitán Médico Ramón y Cajal”. y Moratinos Palomero, M. M. Moratinos Martínez, E Martín Sierra, F J. Guijarro Escribano. 18 El Instituto de Medicina Preventiva de la Defensa y la Fabricación de vacunas. Datos para su historia. E Martín Sierra, E Morattnos Patomem, M. M. Mora rinos Martínez. 30 Proyección de futuro del Instituto de Medicina Preventiva de la Defensa “Capitán Médico Ramón y Cajal”. J. Gervós Camacho. 33 Reportaje de la Jornada. V Martínez Natos, E. López Torres. 36 Vida Militar de Ramón y Cajal (Ponencia de la Jornada). Ji M, Pérez García. 45 De Cajal al 98. Veinticinco años de Sanidad Militar en Cuba (Ponencia de la Jornada). J. M. Torres Medina. 52 Profilaxis del Paludismo (Ponencia de la Jornada). 1. Alvar Ezquerra, Ji Roche Rayo. 55 Cronología de Cajal y su entorno. E Monín Sierra, P Moratinos Patamem. 68 Cajal: Álbum fotográfico de su vida y obra. Medicina Militar ?ot: Revista de Sanidad de las Fuerzas Armadas de España t’ EDITA: Director s Excmo. Sr. G.D. Med. D. Antonio Pérez Peña MINISTERIO SaCAEt4SLA * DE DEFENSA ?tt Consejo Asesor Excmo. Sr. G.D. Med. D. Vicente Carlos Navarro Ruiz Reservados todos los derechos. -

List of Nobel Laureates 1
List of Nobel laureates 1 List of Nobel laureates The Nobel Prizes (Swedish: Nobelpriset, Norwegian: Nobelprisen) are awarded annually by the Royal Swedish Academy of Sciences, the Swedish Academy, the Karolinska Institute, and the Norwegian Nobel Committee to individuals and organizations who make outstanding contributions in the fields of chemistry, physics, literature, peace, and physiology or medicine.[1] They were established by the 1895 will of Alfred Nobel, which dictates that the awards should be administered by the Nobel Foundation. Another prize, the Nobel Memorial Prize in Economic Sciences, was established in 1968 by the Sveriges Riksbank, the central bank of Sweden, for contributors to the field of economics.[2] Each prize is awarded by a separate committee; the Royal Swedish Academy of Sciences awards the Prizes in Physics, Chemistry, and Economics, the Karolinska Institute awards the Prize in Physiology or Medicine, and the Norwegian Nobel Committee awards the Prize in Peace.[3] Each recipient receives a medal, a diploma and a monetary award that has varied throughout the years.[2] In 1901, the recipients of the first Nobel Prizes were given 150,782 SEK, which is equal to 7,731,004 SEK in December 2007. In 2008, the winners were awarded a prize amount of 10,000,000 SEK.[4] The awards are presented in Stockholm in an annual ceremony on December 10, the anniversary of Nobel's death.[5] As of 2011, 826 individuals and 20 organizations have been awarded a Nobel Prize, including 69 winners of the Nobel Memorial Prize in Economic Sciences.[6] Four Nobel laureates were not permitted by their governments to accept the Nobel Prize.