UNIT II SENSORS and VISION SYSTEM Sensors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Discrete Cosine Transform Based Image Fusion Techniques VPS Naidu MSDF Lab, FMCD, National Aerospace Laboratories, Bangalore, INDIA E.Mail: [email protected]
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by NAL-IR Journal of Communication, Navigation and Signal Processing (January 2012) Vol. 1, No. 1, pp. 35-45 Discrete Cosine Transform based Image Fusion Techniques VPS Naidu MSDF Lab, FMCD, National Aerospace Laboratories, Bangalore, INDIA E.mail: [email protected] Abstract: Six different types of image fusion algorithms based on 1 discrete cosine transform (DCT) were developed and their , k 1 0 performance was evaluated. Fusion performance is not good while N Where (k ) 1 and using the algorithms with block size less than 8x8 and also the block 1 2 size equivalent to the image size itself. DCTe and DCTmx based , 1 k 1 N 1 1 image fusion algorithms performed well. These algorithms are very N 1 simple and might be suitable for real time applications. 1 , k 0 Keywords: DCT, Contrast measure, Image fusion 2 N 2 (k 1 ) I. INTRODUCTION 2 , 1 k 2 N 2 1 Off late, different image fusion algorithms have been developed N 2 to merge the multiple images into a single image that contain all useful information. Pixel averaging of the source images k 1 & k 2 discrete frequency variables (n1 , n 2 ) pixel index (the images to be fused) is the simplest image fusion technique and it often produces undesirable side effects in the fused image Similarly, the 2D inverse discrete cosine transform is defined including reduced contrast. To overcome this side effects many as: researchers have developed multi resolution [1-3], multi scale [4,5] and statistical signal processing [6,7] based image fusion x(n1 , n 2 ) (k 1 ) (k 2 ) N 1 N 1 techniques. -

Temperature Compensation Circuit for ISFET Sensor
Journal of Low Power Electronics and Applications Article Temperature Compensation Circuit for ISFET Sensor Ahmed Gaddour 1,2,* , Wael Dghais 2,3, Belgacem Hamdi 2,3 and Mounir Ben Ali 3,4 1 National Engineering School of Monastir (ENIM), University of Monastir, Monastir 5000, Tunisia 2 Electronics and Microelectronics Laboratory, LR99ES30, Faculty of Sciences of Monastir, University of Monastir, Monastir 5000, Tunisia; [email protected] (W.D.); [email protected] (B.H.) 3 Higher Institute of Applied Sciences and Technology of Sousse (ISSATSo), University of Sousse, Sousse 4003, Tunisia; [email protected] 4 Nanomaterials, Microsystems for Health, Environment and Energy Laboratory, LR16CRMN01, Centre for Research on Microelectronics and Nanotechnology, Sousse 4034, Tunisia * Correspondence: [email protected]; Tel.: +216-50998008 Received: 3 November 2019; Accepted: 21 December 2019; Published: 4 January 2020 Abstract: PH measurements are widely used in agriculture, biomedical engineering, the food industry, environmental studies, etc. Several healthcare and biomedical research studies have reported that all aqueous samples have their pH tested at some point in their lifecycle for evaluation of the diagnosis of diseases or susceptibility, wound healing, cellular internalization, etc. The ion-sensitive field effect transistor (ISFET) is capable of pH measurements. Such use of the ISFET has become popular, as it allows sensing, preprocessing, and computational circuitry to be encapsulated on a single chip, enabling miniaturization and portability. However, the extracted data from the sensor have been affected by the variation of the temperature. This paper presents a new integrated circuit that can enhance the immunity of ion-sensitive field effect transistors (ISFET) against the temperature. -
A Novel MEMS Pressure Sensor with MOSFET on Chip
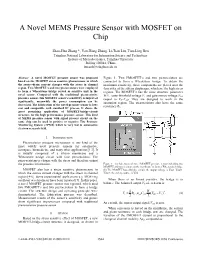
A Novel MEMS Pressure Sensor with MOSFET on Chip Zhao-Hua Zhang *, Yan-Hong Zhang, Li-Tian Liu, Tian-Ling Ren Tsinghua National Laboratory for Information Science and Technology Institute of Microelectronics, Tsinghua University Beijing 100084, China [email protected] Abstract—A novel MOSFET pressure sensor was proposed Figure 1. Two PMOSFET’s and two piezoresistors are based on the MOSFET stress sensitive phenomenon, in which connected to form a Wheatstone bridge. To obtain the the source-drain current changes with the stress in channel maximum sensitivity, these components are placed near the region. Two MOSFET’s and two piezoresistors were employed four sides of the silicon diaphragm, which are the high stress to form a Wheatstone bridge served as sensitive unit in the regions. The MOSFET’s has the same structure parameter novel sensor. Compared with the traditional piezoresistive W/L, same threshold voltage VT and gate-source voltage VGS pressure sensor, this MOSFET sensor’s sensitivity is improved (equal to VG-Vdd). They are designed to work in the significantly, meanwhile the power consumption can be saturation region. The piezoresistors also have the same decreased. The fabrication of the novel pressure sensor is low- resistance R . cost and compatible with standard IC process. It shows the 0 great promising application of MOSFET-bridge-circuit structure for the high performance pressure sensor. This kind of MEMS pressure sensor with signal process circuit on the same chip can be used in positive or negative Tire Pressure Monitoring System (TPMS) which is very hot in automotive electron research field. I. -

Simplifying Current Sensing (Rev. A)
Simplifying Current Sensing How to design with current sense amplifiers Table of contents Introduction . 3 Chapter 4: Integrating the current-sensing signal chain Chapter 1: Current-sensing overview Integrating the current-sensing signal path . 40 Integrating the current-sense resistor . 42 How integrated-resistor current sensors simplify Integrated, current-sensing PCB designs . 4 analog-to-digital converter . 45 Shunt-based current-sensing solutions for BMS Enabling Precision Current Sensing Designs with applications in HEVs and EVs . 6 Non-Ratiometric Magnetic Current Sensors . 48 Common uses for multichannel current monitoring . 9 Power and energy monitoring with digital Chapter 5: Wide VIN and isolated current sensors . 11 current measurement 12-V Battery Monitoring in an Automotive Module . 14 Simplifying voltage and current measurements in Interfacing a differential-output (isolated) amplifier battery test equipment . 17 to a single-ended-input ADC . 50 Extending beyond the maximum common-mode range of discrete current-sense amplifiers . 52 Chapter 2: Out-of-range current measurements Low-Drift, Precision, In-Line Isolated Magnetic Motor Current Measurements . 55 Measuring current to detect out-of-range conditions . 20 Monitoring current for multiple out-of-range Authors: conditions . 22 Scott Hill, Dennis Hudgins, Arjun Prakash, Greg Hupp, High-side motor current monitoring for overcurrent protection . 25 Scott Vestal, Alex Smith, Leaphar Castro, Kevin Zhang, Maka Luo, Raphael Puzio, Kurt Eckles, Guang Zhou, Chapter 3: Current sensing in Stephen Loveless, Peter Iliya switching systems Low-drift, precision, in-line motor current measurements with enhanced PWM rejection . 28 High-side drive, high-side solenoid monitor with PWM rejection . 30 Current-mode control in switching power supplies . -
Integrated Switch Current Sensor for Shortcircuit Protection and Current Control of 1.7-Kv Sic MOSFET Modules
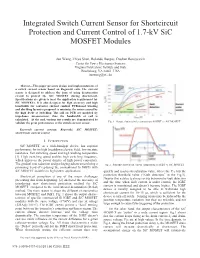
Integrated Switch Current Sensor for Shortcircuit Protection and Current Control of 1.7-kV SiC MOSFET Modules Jun Wang, Zhiyu Shen, Rolando Burgos, Dushan Boroyevich Center for Power Electronics Systems Virginia Polytechnic Institute and State Blacksburg, VA 24061, USA [email protected] Abstract—This paper presents design and implementations of a switch current sensor based on Rogowski coils. The current sensor is designed to address the issue of using desaturation circuit to protect the SiC MOSFET during shortcircuit. Specifications are given to meet the application requirement for SiC MOSFETs. It is also designed for high accuracy and high bandwidth for converter current control. PCB-based winding and shielding layout is proposed to minimize the noises caused by the high dv/dt at switching. The coil on PCB are modeled by impedance measurement, thus the bandwidth of coil is calculated. At the end, various test results are demonstrated to validate the great performance of the switch current sensor. Fig. 1. Output characteristics comparison: Si IGBT vs. SiC MOSFET Keywords—current sensing; Rogowski; SiC MOSFET; shortcircuit; current control I. INTRODUCTION SiC MOSFET, as a wide-bandgap device, has superior performance for its high breakdown electric field, low on-state resistance, fast switching speed and high working temperature [1]. High switching speed enables high switching frequency, which improves the power density of high power converters. The gradual cost reduction and packaging advancement bring a Fig. 2. Principle shortcircuit current comparison: Si IGBT vs. SiC MOSFET promising trend of replacing the conventional Si IGBTs with SiC MOSFET modules in high power applications. quickly and reaches its saturation value, where the VCE hits the Shortcircuit protection is one of the major challenges protection threshold value (“Fault detection” in the Fig.1). -

Development of MEMS Capacitive Sensor Using a MOSFET Structure
Extended Summary 本文は pp.102-107 Development of MEMS Capacitive Sensor Using a MOSFET Structure Hayato Izumi Non-member (Kansai University, [email protected]) Yohei Matsumoto Non-member (Kansai University, [email protected] u.ac.jp) Seiji Aoyagi Member (Kansai University, [email protected] u.ac.jp) Yusaku Harada Non-member (Kansai University, [email protected] u.ac.jp) Shoso Shingubara Non-member (Kansai University, [email protected]) Minoru Sasaki Member (Toyota Technological Institute, [email protected]) Kazuhiro Hane Member (Tohoku University, [email protected]) Hiroshi Tokunaga Non-member (M. T. C. Corp., [email protected]) Keywords : MOSFET, capacitive sensor, accelerometer, circuit for temperature compensation The concept of a capacitive MOSFET sensor for detecting voltage change, is proposed (Fig. 4). This circuitry is effective for vertical force applied to its floating gate was already reported by compensating ambient temperature, since two MOSFETs are the authors (Fig. 1). This sensor detects the displacement of the simultaneously suffer almost the same temperature change. The movable gate electrode from changes in drain current, and this performance of this circuitry is confirmed by SPICE simulation. current can be amplified electrically by adding voltage to the gate, The operating point, i.e., the output voltage, is stable irrespective i.e., the MOSFET itself serves as a mechanical sensor structure. of the ambient temperature change (Fig. 5(a)). The output voltage Following this, in the present paper, a practical test device is has comparatively good linearity to the gap length, which would fabricated. -

THE IMPACT QF MOSFET-BASED SENSORS * Abstract The
CORE Metadata, citation and similar papers at core.ac.uk Provided by Universiteit Twente Repository Sensors and Actuators, 8 (1985) 109 - 127 109 THE IMPACT QF MOSFET-BASED SENSORS * P BERGVELD Department of Electrical Engmeermg, Twente Unwerslty of Technology, P 0 Box 217, 7500 AE Enschede (The Netherlands) (Received May 21,1985, m revlsed form October 4,1985, accepted October 29, 1985) Abstract The basic structure as well as the physical existence of the MOS held- effect transistor 1s without doubt of great importance for the development of a whole series of sensors for the measurement of physical and chemical environmental parameters The equation for the MOSFET dram current already shows a number of parameters that can be directly influenced by an external quantity, but small technological varlatlons of the orlgmal MOSFET configuration also give rise to a large number of sensing propertles All devices have m common that a surface charge 1s measured m a slllcon chip, depending on an electric field m the adJacent insulator FET-based sensors such as the GASFET, OGFET, ADFET, SAFET, CFT, PRESSFET, ISFET, CHEMFET, REFET, ENFET, IMFET, BIOFET, etc developed up to the present or those to be developed m the near future will be discussed m relation to the conslderatlons mentioned above 1. Introduction The measurement of semiconductor surface charge as a function of an electric field perpendicular to the surface was mentloned as early as 1925 by Llhenfeld and Hell as a possible principle for an electronic device that would not consume any power -

CMOS Image Sensors Are Entering a New Age
CMOS Image Sensors are entering a new age Pierre Fereyre, Gareth Powell e2v, Avenue de Rochepleine, BP123, Saint-Egrève, F-38521, France. I. INTRODUCTION In the early 90’s, it was suggested that Charge Coupled Devices (CCDs) were in the process of becoming extinct and considered to be ‘technological dinosaurs’ [1]. The prediction is not entirely wrong, if the announcement made by Sony in 2015 is taken as an example. Sony Corporation has officially announced the end of the mass production of CCD and has entered into the last buy order procedure. While this announcement was expected for many years, it has caused a stir within the professional imaging community [2]. It is interesting to note that many industrial or professional applications (where CMOS Image Sensor (CIS) technology was expected to dominate) are still based on CCD sensors. Which characteristics still make CCDs more attractive that are not available with a CIS? At the beginning the two technologies cohabited and CCDs quickly established themselves as a superior technology to meet stringent image quality requirements. CMOS technology was then in its infancy and limited by its inherent noise and the pixel complexity. Architectures were then essentially analog and the idea of integrating the image processing features (System On-Chip) was not yet considered. The shrinkage of the technological node according to Moore's Law has made this technology more and more competitive due to its rapid expansion in the 2000s. CIS are now in the race of continuously improving electro-optical performances, and in many aspects are often shown to be better than CCDs. -

DC I-V Characterization of FET-Based Biosensors Using the 4200A-SCS
DC I-V Characterization of FET-Based Biosensors Using the 4200A-SCS Parameter Analyzer –– APPLICATION NOTE DC I-V Characterization of FET-Based Biosensors APPLICATION NOTE Using the 4200A-SCS Parameter Analyzer Introduction Analyzer shown in Figure 1. This configurable test system simplifies these measurements into one integrated system Extensive research and development have been invested that includes hardware, interactive software, graphics, and in semiconductor-based biosensors because of their low analysis capabilities. cost, rapid response, and accurate detection. In particular, field effect transistor (FET) based biosensors, or bioFETs, This application note describes typical bioFETs, explains are used in a wide variety of applications such as in how to make electrical connections from the SMUs to the biological research, point-of-care diagnostics, environmental device, defines common DC I-V tests and the instruments applications and even in food safety. used to make the measurements, and explains measurement considerations for optimal results. A bioFET converts a biological response to an analyte and converts it into an electrical signal that can be easily measured using DC I-V techniques. The output characteristics (Id-Vd), transfer (Id-Vg) characteristics, and current measurements vs.time (I-t) can be related to the detection and magnitude of the analyte. These DC I-V tests can easily be measured using multiple Source Measure Units (SMUs) depending on the number of terminals on the device. An SMU is an instrument that can source and measure current and voltage and can be used to apply voltage to the gate and drain terminals of the FET. An integrated system that combines multiple SMUs with interactive software is the Keithley 4200A-SCS Parameter Figure 1. -

Chapter 3 Sensors and Biosensors for Endocrine Disrupting Chemicals: State-Of-The-Art and Future Trends
Chapter 3 Sensors and biosensors for endocrine disrupting chemicals: State-of-the-art and future trends Achintya N. Bezbaruah and Harjyoti Kalita 3.1 INTRODUCTION Endocrine systems control hormones and activity-related hormones in many living organisms including mammals, birds, and fish. The endocrine system consists of various glands located throughout the body, hormones produced by the glands, and receptors in various organs and tissues that recognize and respond to the hormones (USEPA, 2010a). There are some chemicals and compounds that cause interferences in the endocrine system and these substances are known as endocrine disrupting chemicals (EDCs). Wikipedia states that EDCs or ‘‘endocrine disruptors are exogenous substances that act like hormones in the endocrine system and disrupt the physiologic function of #2010 IWA Publishing. Treatment of Micropollutants in Water and Wastewater . Edited by Jurate Virkutyte, Veeriah Jegatheesan and Rajender S. Varma. ISBN: 9781843393160. Published by IWA Publishing, London, UK. 94 Treatment of Micropollutants in Water and Wastewater endogenous hormones. They are sometimes also referred to as hormonally active agents.’’ EDCs can be man-made or natural. These compounds are found in plants (phytochemicals), grains, fruits and vegetables, and fungus. Alkyl-phenols found in detergents, bisphenol A used in PVC products, dioxins, various drugs, synthetic estrogens found in birth control pills, heavy metals (Pb, Hg, Cd), pesticides, pasticizers, and phenolic products are all examples of EDCs from a long list that is rapidly getting longer. It is suspected that EDCs could be harmful to living organisms, therefore, there is a concerted effort to detect and treat EDCs before they can cause harm to the ecosystem components. -

CCD and CMOS Sensor Technology Technical White Paper Table of Contents
White paper CCD and CMOS sensor technology Technical white paper table of contents 1. Introduction to image sensors 3 2. CCD technology 4 3. CMOS technology 5 4. HDtV and megapixel sensors 6 5. Main differences 6 6. Conclusion 6 5. Helpful links and resources 7 1. Introduction to image sensors When an image is being captured by a network camera, light passes through the lens and falls on the image sensor. The image sensor consists of picture elements, also called pixels, that register the amount of light that falls on them. They convert the received amount of light into a corresponding number of electrons. The stronger the light, the more electrons are generated. The electrons are converted into voltage and then transformed into numbers by means of an A/D-converter. The signal constituted by the numbers is processed by electronic circuits inside the camera. Presently, there are two main technologies that can be used for the image sensor in a camera, i.e. CCD (Charge-coupled Device) and CMOS (Complementary Metal-oxide Semiconductor). Their design and dif- ferent strengths and weaknesses will be explained in the following sections. Figure 1 shows CCD and CMOS image sensors. Figure 1. Image sensors: CCD (left) and CMOS (right) Color filtering Image sensors register the amount of light from bright to dark with no color information. Since CMOS and CCD image sensors are ‘color blind’, a filter in front of the sensor allows the sensor to assign color tones to each pixel. Two common color registration methods are RGB (Red, Green, and Blue) and CMYG (Cyan, Magenta, Yellow, and Green). -
Fast Transmission of Image, Reduction of Energy Consumption and Lifetime Extension in Wireless Cameras Networks
Vol. 11(1), pp. 1-11, April 2019 DOI: 10.5897/JETR2018.0656 Article Number: 0336C9A60770 ISSN: 2006-9790 Copyright ©2019 Journal of Engineering and Technology Author(s) retain the copyright of this article http://www.academicjournals.org/JETR Research Full Length Research Fast transmission of image, reduction of energy consumption and lifetime extension in wireless cameras networks Nirmi Hajraoui* and N. Raissouni Laboratory of Remote Sensing and Geographic Information System (LRSGIS), Department of Telecommunication, University of Abdelmalek Essaâdi, ENSA-Tetouan, Mhanech2, Tetouan, 93002, Morocco. Received 8 December, 2018; Accepted 7 March, 2019 In this paper, a fast image processing was proposed. It ensures energy efficiency and the extension of both the lifetime and the proper functioning of the network. It is a filtered zonal discrete cosine transform that allows and optimizes an effective adjustment of the trade-off between power consumption and image distortion. This is a remarkable energy saving method, in this kind of networks. It is applied throughout the chain of transmission and decompression of the image. It makes it possible to integrate a fast and a filtered zonal discrete cosine transform. This proposal dramatically improves the indicated method. The insertion of the frequency filters in this chain has greatly reduced the coefficients to be calculated and to be coded in each block. This new method ensures the fast transfer of images, decreases more the energy consumption of sensors and maintains a long network lifetime. This proposal seems to us very satisfactory as shown by the experimental results provided here. Key words: Energy saving, fast zonal discrete cosine transform, filtered fast zonal discrete cosine transform, image compression, wireless vision sensors network, zonal coding.