Making Things Move DIY Mechanisms for Inventors, Hobbyists, and Artists
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Hydraulic Pumps, Motors and Accessories
Hydraulic pumps, motors and accessories The solution for all your hydraulic needs Content Sunfab history 3 Product overview 4 Pumps fixed single flow 6 Pumps fixed dual flow 12 Pumps variable flow 18 Motors fixed 20 Accessories 26 Development 30 Production 31 Our service features 32 Environment and Quality Assurance 33 Global presence 34 2 Our successes continue and we have only just started Sunfab develops, produces and sells components to operate hydraulic equipment within the area of mobile vehicles. The company Sunfab can trace its roots back to Sundins Fa- laid the foundation for the future successes of the new com- briker, a family company that was established as long ago pany, Sunfab. as 1925 and, for many years, was a successful manufacturer These days, Sunfab Hydraulics AB supplies companies with of skis. A fleet of vehicles ensured reliable transportation of some of the world’s most sophisticated products in its niche raw materials to the factory. Heavy, irrational loading and un- market. Products that meet stringent quality, environmen- loading gave Eric Sundin, the founder of the company, the tal and safety requirements and offer functional solutions. incentive required to develop cranes for the vehicles. We are just embarking on a long and successful journey of The first crane was built in 1947 by HIAB, a separate com- development. pany. As time went on, demands increased for greater capacity and, in 1954, a hydraulic pump was developed that 3 Product overview SAP 012-108 DIN SAP 084, 108 DIN SAP 084, 108 DIN SAPT 090, 130 DIN Single fl ow pumps Optimised Optimised for injector Sunfab is your supplier of a wide range of hydraulic pumps. -
Unit 10 Lubricating Systems
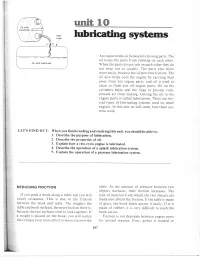
unit 10 FUEL TANK lubricating systems An engine needs oil between its moving parts. The oil keeps the parts from rubbing on each other. When the parts do not rub on each other they do not wear out as quickly. The parts also move more easily, because the oil prevents friction. The oil also helps cool the engine by carrying heat away from hot engine parts, and oil is used to clean or flush dirt off engine parts. Oil on the cylinders helps seal the rings to prevent com• pressed air from leaking. Getting the oil to the engine parts is called lubrication. There are sev• eral types of lubricating systems used on small engines. In this unit we will study how these sys• tems work. LET'S FIND OUT: When you finish reading and studying this unit, you should be able to: 1. Describe the purpose of lubrication. 2. Describe the properties of oil. 3. Explain how a two-cycle engine is lubricated. 4. Describe the operation of a splash lubrication system. 5. Explain the operation of a pressure lubrication system. REDUCING FRICTION table. As the amount of pressure between two objects increases, their friction increases. The If you push a book along a table top you will type of material from which the two objects are notice resistance. This is due to the friction made also affects the friction. If the table is made between the book and table. The rougher the of glass, the book slides across it easily. If it is table and book surfaces, the more friction there is, made of rubber, it is very difficult to push the because the two surfaces tend to lock together. -
Using the ELECTRIC VLSI Design System Version 9.07
Using the ELECTRIC VLSI Design System Version 9.07 Steven M. Rubin Author's affiliation: Static Free Software ISBN 0−9727514−3−2 Published by R.L. Ranch Press, 2016. Copyright (c) 2016 Static Free Software Permission is granted to make and distribute verbatim copies of this book provided the copyright notice and this permission notice are preserved on all copies. Permission is granted to copy and distribute modified versions of this book under the conditions for verbatim copying, provided also that they are labeled prominently as modified versions, that the authors' names and title from this version are unchanged (though subtitles and additional authors' names may be added), and that the entire resulting derived work is distributed under the terms of a permission notice identical to this one. Permission is granted to copy and distribute translations of this book into another language, under the above conditions for modified versions. Electric is distributed by Static Free Software (staticfreesoft.com), a division of RuLabinsky Enterprises, Incorporated. Table of Contents Chapter 1: Introduction.....................................................................................................................................1 1−1: Welcome.........................................................................................................................................1 1−2: About Electric.................................................................................................................................2 1−3: Running -

Mobile Robot Controlling Possibilities of Inertial Navigation System
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 149 ( 2016 ) 404 – 413 International Conference on Manufacturing Engineering and Materials, ICMEM 2016, 6-10 June 2016, Nový Smokovec, Slovakia Mobile robot controlling possibilities of inertial navigation system Mohammad Emal Qazizadaa – Elena Pivarčiováa* aTechnical University in Zvolen, Faculty of Environmental and Manufacturing Technology, Department of Machinery Control and Automation Technology, Masarykova 24, 960 53 Zvolen, Slovakia Abstract The paper explain analysis of inertial navigation system and accelerometric, gyroscopic sensors and describe possibilities of their application for inertial navigation of mobile robot. Such controlling system allows to monitor exact position of robot. These information can be applied for robot controlling, its autonomous control or its tracking. Inertial navigation is completely autonomous and independent from surroundings, i.e. the system is resistant from external influences as magnetic disturbances, electronically disturbance, signal deformation, etc. For mobile robots to be successful, they have to move safely in environments populated and dynamic. While recent research has led to a variety of localization methods that can track robots well in static environments, we still lack methods that can robustly localize mobile robots in dynamic environments. © 2016 The The Authors. Authors. Published Published by Elsevierby Elsevier B.V. Ltd. This is an open access article under the CC BY-NC-ND license Peer-re(http://creativecommons.org/licenses/by-nc-nd/4.0/view under responsibility of the organizing committee). of ICMEM 2016 Peer-review under responsibility of the organizing committee of ICMEM 2016 Keywords: inertial navigation system, robots, gyroscop, accelerometer 1. Introduction Inertial navigation is a self-contained navigation technique in which measurements provided by accelerometers and gyroscopes are used to track the position and orientation of an object relative to a known starting point, orientation and velocity. -
Getting Started in High Performance Electronic Design
Getting started in high performance electronic design Wojtek Skulski Department of Physics and Astronomy University of Rochester Rochester, NY 14627-0171 skulski _at_ pas.rochester.edu First presented May/23/2002 Updated for the web July/03/2004 Wojtek Skulski May/2002 Department of Physics and Astronomy, University of Rochester Getting started with High performance electronic design • 3-hour class • Designing high performance surface mount and multilayer boards. • What tools and resources are available? • How to get my design manufactured and assembled? • Board design with OrCAD Capture and Layout. • When and where: • Thursday, May/23/2002, 9-12am, Bausch&Lomb room 106 (1st floor). • Slides updated for the web July/03/2004. • Reserve your handout. • Send e-mail to [email protected] if you plan to attend. • Walk-ins are invited, but there may be no handouts if you do not register. • See you there! Wojtek Skulski May/2002 Department of Physics and Astronomy, University of Rochester The goal and outline of this class • Goal: • Describe the tools available to us for designing high performance electronic instruments. • Outline • Why do we need surface mount and multilayer boards? • What tools and resources are available? • How to get my PCB manufactured? • How to get my board assembled? • Designing with OrCAD Capture and OrCAD Layout. • The audience • You know the basics of electronics. • … and you need to get going quickly with your design. Wojtek Skulski May/2002 Department of Physics and Astronomy, University of Rochester Disclaimer • I am describing tools and methods which work for me. • I do not claim that this information is complete. -

Wood Engraving Using 3 Axis CNC Machine Ms.Disha D.Devardekar1, Ms.Aishwarya J.Gudale2
Wood Engraving Using 3 Axis CNC Machine Ms.Disha D.Devardekar1, Ms.Aishwarya J.Gudale2, Ms.Rutuja R.Karande3, 1,2,3Department of Electronics & Telecommunication Engineering, Bharati Vidyapeeth’s College of Engineering Kolhapur (India) ABSTRACT This machine can be used for Cutting, Engraving and Marking on wood, acrylic and PCB objects. Design picture that have been made on the PC sent to the microcontroller using serial communication then CNC perform execution on object according to point coordinates. Drill spindles will create patterns on objects automatically according to the design drawings. After testing, the CNC machine can be used for cutting, engraving and marking on wood, acrylic and PCB to 2D or 3D objects with 98.5% of carving accuracy and 100% of depth accuracy.Though there are several models for plotter, this plotter is designed in economical way. Main advantage of this plotter is we can replace the tool based on any application such as engraving machine, laser cutting machine, painting any surface and drawing purposes.Increase in the rapid growth of Technology significantly increased the usage and utilization of CNC systems in industries but at considerable expensive.The idea on fabrication of low cost CNC Router came forward to reduce the cost and complexity in CNC systems.Inspiring from this CNC technology and revolutionary change in the world of digital electronics &Microcontroller, we are presenting here an idea of “ 3 Axis CNC Machine For Wood Engraving Based On CNC Controller.” Keywords: CNC, Cutting, Engraving, Marking, Microcontroller. I.INTRODUCTION Working with automatic electrical and mechanical equipment demands precise, accuracy, speed, consistency and flexibility. -

Engineering Fit: Optimizing Design for Functional 3D Printed Assemblies
FORMLABS WHITE PAPER: Engineering Fit: Optimizing Design for Functional 3D Printed Assemblies Tolerance and fit are essential concepts that engineers use to optimize the functionality of mechanical assemblies and the cost of production. Formlabs extensively studies the accuracy of our materials and works to maximize repeatability between prints and across printers. The data and best practices in this white paper can help Form 2 users to design functional assemblies that work as intended, with the least amount of post-processing or trial-and-error. May 2017 Table of Contents Value of Tolerances in 3D Printing . 3 Fit Selection. 4 Measuring and Applying Tolerance. 6 Friction. 9 Lubrication . 11 Bonded Components. .11 Machining Printed Parts . 12 Conclusion . .13 FORMLABS WHITE PAPER: Engineering Fit: Optimizing Design for Functional 3D Printed Assemblies 2 Value of Tolerances in 3D Printing In traditional machining, tighter tolerances are exponentially related to increased cost. Tighter tolerances require additional and slower machining steps than wider tolerances. Machined parts are designed with the widest tolerances allowable for a given application. Unlike machining, where parts are progressively refined to tighter tolerances, stereolithography (SLA) has a single automated production phase. Proper dimensional tolerancing lowers post-processing time and ease of assembly, and reduces the material cost of iteration. Improper tolerances for a particular material can also result in broken parts, especially for press-fit components in brittle materials. With larger assemblies, or when producing multiples of something, proper dimensional tolerancing quickly becomes worthwhile. Basic Size Hole Shaft Tolerance is the predicted range of possible dimensions for parts at the time of manufacture. -

Considerations for Determining the Coefficient of Inertia Masses for A
sensors Article Considerations for Determining the Coefficient of Inertia Masses for a Tracked Vehicle 1 1 1 2, Octavian Alexa , Iulian Coropet, chi , Alexandru Vasile , Ionica Oncioiu * 1 and Lucian S, tefănit, ă Grigore 1 Military Technical Academy “FERDINAND I”, 39-49 George Cos, buc Av., 050141 Bucharest, Romania; [email protected] (O.A.); [email protected] (I.C.); [email protected] (A.V.); [email protected] (L.S, .G.) 2 Faculty of Finance-Banking, Accountancy and Business Administration, Titu Maiorescu University, 040051 Bucharest, Romania * Correspondence: [email protected]; Tel.: +40-372-710-962 Received: 8 August 2020; Accepted: 28 September 2020; Published: 29 September 2020 Abstract: The purpose of the article is to present a point of view on determining the mass moment of inertia coefficient of a tracked vehicle. This coefficient is very useful to be able to estimate the performance of a tracked vehicle, including slips in the converter. Determining vehicle acceleration plays an important role in assessing vehicle mobility. Additionally, during the transition from the Hydroconverter to the hydro-clutch regime, these estimations become quite difficult due to the complexity of the propulsion aggregate (engine and hydrodynamic transmission) and rolling equipment. The algorithm for determining performance is focused on estimating acceleration performance. To validate the proposed model, tests were performed to determine the equivalent reduced moments of inertia at the drive wheel (gravitational method) and the main components (three-wire pendulum method). The dynamic performances determined during the starting process are necessary for the validation of the general model for simulating the longitudinal dynamics of the vehicle. -

Setting up the Hardware and Software for a 3D Printer
Setting up the Hardware and Software for a 3D Printer Caroline Kerbelis Application Note March 28th 2014 Design Team 8 ECE 480 Abstract The purpose of team 8’s project is to design, fabricate, simulate, test and demonstrate a specialty printer that will be used to produce tactile graphics and maps for visually impaired students at MSU. Ideally this printer will produce durable images and be more feasible than current specialty printers available commercially. Extensive knowledge of 3D printer hardware and software and how they both interacted with each other is essential to the success of the project. 1 Table of Contents Abstract………………………..…………………….…………………………….1 Key Words.…………………...……………………….…………….…………….3 Introduction………………………………………………………………………..3 Hardware…………………………………………………………….…………….4 Software……………………………….…………………………………………..5 CAD Tools…………………….…………………………….………………5 CAM Tools…….…………………………………….….….……….……….6 Firmware……………………...……………………….…………….…………….7 Temperature Measurement…….…………………………….………………8 Conclusion..…………………...……………………….…………….…………….9 References..…………………...……………………….…………….…………...10 2 Introduction 3D printing, also known as additive manufacturing, is a process consisting of making a solid three-dimensional object from a digital model. This form of printing is achieved by using an additive process, where successive layers of material are added to a surface in different shapes to create a particular object, figure or graphic. The image is created using a Computer-Aided Design program (CAD) and then saving this file as a STereoLithography (STL) file. The file is then transferred to a g-code generator program which converts the file containing the image into a set of instructions/language that the printer understands. The 3D printer then used Computer Aided Manufacturing (CAM) software that reads the file and send electronic signals to control uses an extruder and motors that move along a x, y, and z axis to extrude a filament onto a surface creating the object through sequential layering. -

Programy Pro Obsluhu CNC
2021/01/14 06:54 1/11 CNC CNC CNC stroj není CNC strojař. Myslet za tebe nebude. Co nedělat: Neodpojovat motory když je k jednotce připojený napájení Nezapínat řídící jednotku když nejsou připojený motory Pokud arduino neblika po pripojeni k USB, tak nepripojuj napajeni motoru. Je tam asi zkrat. Nepřipojovat napájení motorů, pokud arduino nemá 5V z USB. Netočit manuálně s motorem moc rychle (generuje napětí?) Nešahat na žádný kontakty na arduinu Nenajizdet do kraju, zatim nejsou nainstalovany koncovy spinace Nenamoč drevotriskovy desky na CNC Nezapomeň vynulovat souřadnice před posláním G-kódu do stroje Neposílej do stroje G-kód, kterej sis předtim pořádně neprohlídnul/nevyzkoušel ve vzduchu (rozměry, rychlosti, atd…) Neutahuj při upínání šrouby do insertů moc hluboko nebo velkou silou. Neutahuj je ani proti šikmejm plochám! Nenastavuj nic na VFD invertoru vretena!! Da se tak spalit invertor i s motorem. Neutahuj klestinu vretene moc velkou silou (cim delsi klic tim snazsi je to prehnat). Vreteno pak ztrati presnost a je po srande. Klestinu vzdycky nejdriv zacvakni do matky, nez do ni das frezu, nebo nez ji zacnes sroubovat do vretene. Nenapínej řemeny silou. Šroub napínáku je velkej převod, takže bez námahy řemen přetrhne. Frezy skladuj tak, aby se nemohly otresama mlatit o sebe (treba v jedny krabici nebo v pytli). Jsou krehky a vzajemne se ostipou a ztupi. Programy pro obsluhu CNC Moje soucasny workflow 2D: LibreCAD → export do formatu DXF → bCNC → UGS-platform 3D: OpenSCAD → export do formatu STL → Kiri:Moto → UGS-platform PCB: gEDA/PCB -

Kustannustehokkaat Cad, Fem Ja Cam -Ohjelmat Tutkimus Saatavilla Olevista Ohjelmista Tammikuussa 2018
OULUN YLIOPISTON KERTTU SAALASTI INSTITUUTIN JULKAISUJA 6/2018 Kustannustehokkaat Cad, Fem ja Cam -ohjelmat Tutkimus saatavilla olevista ohjelmista tammikuussa 2018 Terho Iso-Junno Tulevaisuuden tuotantoteknologiat FMT-tutkimusryhmä Terho Iso-Junno KUSTANNUSTEHOKKAAT CAD, FEM JA CAM -OHJELMAT Tutkimus saatavilla olevista ohjelmista tammikuussa 2018 OULUN YLIOPISTO Kerttu Saalasti Instituutin julkaisuja Tulevaisuuden tuotantoteknologiat (FMT) -tutkimusryhmä ISBN 978-952-62-2018-5 (painettu) ISBN 978-952-62-2019-2 (elektroninen) ISSN 2489-3501 (painettu) Terho Iso-Junno Kustannustehokkaat CAD, FEM ja CAM -ohjelmat. Tutkimus saatavilla olevista ohjelmista tammikuussa 2018. Oulun yliopiston Kerttu Saalasti Instituutti, Tulevaisuuden tuotantoteknologiat (FMT) -tutkimusryhmä Oulun yliopiston Kerttu Saalasti Instituutin julkaisuja 6/2018 Nivala Tiivistelmä Nykyaikaisessa tuotteen suunnittelussa ja valmistuksessa tietokoneohjelmat ovat avainasemassa olevia työkaluja. Kaupallisten ohjelmien lisenssihinnat voivat nousta korkeiksi ja olla hankinnan esteenä etenkin aloittelevilla yrityksillä. Tässä tutkimuk- sessa on kartoitettu kustannuksiltaan edullisia CAD, FEM ja CAM -ohjelmia, joita voisi käyttää yritystoiminnassa. CAD-ohjelmien puolella perinteisille 2D CAD-ohjelmille löytyy useita hyviä vaih- toehtoja. LibreCAD ja QCAD ovat helppokäyttöisiä ohjelmia perustason piirtämiseen. Solid Edge 2D Drafting on erittäin monipuolinen täysiverinen 2D CAD, joka perustuu parametriseen piirtämiseen. 3D CAD-ohjelmien puolella tarjonta on tasoltaan vaihtelevaa. -

Measuring the Performance Characteristics of a Motorcycle
August 2019, Vol. 19, No. 4 MANUFACTURING TECHNOLOGY ISSN 1213–2489 Measuring the Performance Characteristics of a Motorcycle Adam Hamberger, Milan Daňa Regional Technological Institute, University of West Bohemia – Faculty of Mechanical Engineering, Univerzitní 8, Pilsen 306 14, Czech Republic. E-mail: [email protected] This work deals with an experiment, whose output is the comparison of power characteristics which were meas- ured in three ways. The first way used a commercially manufactured dynamometer. For the second measurement, a special dynamometer with our own computing system and a sensor within this project was created. The last way of measuring the performance characteristics was done without a dynamometer. The measurement works on the principle of acceleration the spinning of a flywheel. Due to this, the measuring is called an acceleration test. The basic principles are described before the experiment in order to grasp the characteristics. All explanations are based on schemes and easy mathematical and differential formulas to describe the construction of the dynamom- eter and the principle of its functions from the engine to the computer. The relations between published and un- published quantities defining engine dynamics are explained here. In the end, this work points to possible and intended measuring failures which are an infamous practice at many measuring stations. Keywords: Dynamometer, power characteristics, driving forces, torque, performance. Introduction These forces are divided into two basic sorts. The first one is dependent on velocity and it can be written as: All vehicle engines overcome resistances on the road. 2 Fres( v )= c21 v + c v + ( c val + sin( )) m g [ N ], (1) where: φ … climb angle [rad], v … velocity [m/s], m … full weight[kg], 2 c1,c2,croll … coefficients [-], g … gravity acceleration [m/s ].