Measuring the Performance Characteristics of a Motorcycle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Hydraulic Pumps, Motors and Accessories
Hydraulic pumps, motors and accessories The solution for all your hydraulic needs Content Sunfab history 3 Product overview 4 Pumps fixed single flow 6 Pumps fixed dual flow 12 Pumps variable flow 18 Motors fixed 20 Accessories 26 Development 30 Production 31 Our service features 32 Environment and Quality Assurance 33 Global presence 34 2 Our successes continue and we have only just started Sunfab develops, produces and sells components to operate hydraulic equipment within the area of mobile vehicles. The company Sunfab can trace its roots back to Sundins Fa- laid the foundation for the future successes of the new com- briker, a family company that was established as long ago pany, Sunfab. as 1925 and, for many years, was a successful manufacturer These days, Sunfab Hydraulics AB supplies companies with of skis. A fleet of vehicles ensured reliable transportation of some of the world’s most sophisticated products in its niche raw materials to the factory. Heavy, irrational loading and un- market. Products that meet stringent quality, environmen- loading gave Eric Sundin, the founder of the company, the tal and safety requirements and offer functional solutions. incentive required to develop cranes for the vehicles. We are just embarking on a long and successful journey of The first crane was built in 1947 by HIAB, a separate com- development. pany. As time went on, demands increased for greater capacity and, in 1954, a hydraulic pump was developed that 3 Product overview SAP 012-108 DIN SAP 084, 108 DIN SAP 084, 108 DIN SAPT 090, 130 DIN Single fl ow pumps Optimised Optimised for injector Sunfab is your supplier of a wide range of hydraulic pumps. -
Unit 10 Lubricating Systems
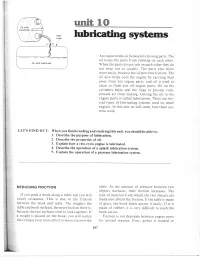
unit 10 FUEL TANK lubricating systems An engine needs oil between its moving parts. The oil keeps the parts from rubbing on each other. When the parts do not rub on each other they do not wear out as quickly. The parts also move more easily, because the oil prevents friction. The oil also helps cool the engine by carrying heat away from hot engine parts, and oil is used to clean or flush dirt off engine parts. Oil on the cylinders helps seal the rings to prevent com• pressed air from leaking. Getting the oil to the engine parts is called lubrication. There are sev• eral types of lubricating systems used on small engines. In this unit we will study how these sys• tems work. LET'S FIND OUT: When you finish reading and studying this unit, you should be able to: 1. Describe the purpose of lubrication. 2. Describe the properties of oil. 3. Explain how a two-cycle engine is lubricated. 4. Describe the operation of a splash lubrication system. 5. Explain the operation of a pressure lubrication system. REDUCING FRICTION table. As the amount of pressure between two objects increases, their friction increases. The If you push a book along a table top you will type of material from which the two objects are notice resistance. This is due to the friction made also affects the friction. If the table is made between the book and table. The rougher the of glass, the book slides across it easily. If it is table and book surfaces, the more friction there is, made of rubber, it is very difficult to push the because the two surfaces tend to lock together. -

Readout No.42E 08 Feature Article
eature Article Wheel Slip Simulation for Dynamic Road Load Simulation FFeatureApplication Article Application ReprintofReadoutNo.38 Wheel Slip Simulation for Dynamic Road Load Simulation Increasingly stringent fuel economy standards are forcing automobile Bryce Johnson manufacturers to search for efficiency gains in every part of the drive train from engine to road surface. Safety mechanisms such as stability control and anti-lock braking are becoming more sophisticated. At the same time drivers are demanding higher performance from their vehicles. Hybrid transmissions and batteries are appearing in more vehicles. These issues are forcing the automobile manufacturers to require more from their test stands. The test stand must now simulate not just simple vehicle loads such as inertia and windage, but the test stand must also simulate driveline dynamic loads. In the past, dynamic loads could be simulated quite well using Service Load Replication (SLR*1). However, non-deterministic events such as the transmission shifting or application of torque vectoring from an on board computer made SLR unusable for the test. The only way to properly simulate driveline dynamic loads for non- deterministic events is to provide a wheel-tire-road model simulation in addition to vehicle simulation. The HORIBA wheel slip simulation implemented in the SPARC power train controller provides this wheel-tire-road model simulation. *1: Service load replication is a frequency domain transfer function calculation with iterative convergence to a solution. SLR uses field collected, time history format data. Introduction frequency. The frequency will typically manifest itself between 5 and 10 Hz for cars and light trucks. (see To understand why tire-wheel simulation is required, we should first understand the type of driveline dynamics that need to be reproduced on the test stand. -

Mobile Robot Controlling Possibilities of Inertial Navigation System
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 149 ( 2016 ) 404 – 413 International Conference on Manufacturing Engineering and Materials, ICMEM 2016, 6-10 June 2016, Nový Smokovec, Slovakia Mobile robot controlling possibilities of inertial navigation system Mohammad Emal Qazizadaa – Elena Pivarčiováa* aTechnical University in Zvolen, Faculty of Environmental and Manufacturing Technology, Department of Machinery Control and Automation Technology, Masarykova 24, 960 53 Zvolen, Slovakia Abstract The paper explain analysis of inertial navigation system and accelerometric, gyroscopic sensors and describe possibilities of their application for inertial navigation of mobile robot. Such controlling system allows to monitor exact position of robot. These information can be applied for robot controlling, its autonomous control or its tracking. Inertial navigation is completely autonomous and independent from surroundings, i.e. the system is resistant from external influences as magnetic disturbances, electronically disturbance, signal deformation, etc. For mobile robots to be successful, they have to move safely in environments populated and dynamic. While recent research has led to a variety of localization methods that can track robots well in static environments, we still lack methods that can robustly localize mobile robots in dynamic environments. © 2016 The The Authors. Authors. Published Published by Elsevierby Elsevier B.V. Ltd. This is an open access article under the CC BY-NC-ND license Peer-re(http://creativecommons.org/licenses/by-nc-nd/4.0/view under responsibility of the organizing committee). of ICMEM 2016 Peer-review under responsibility of the organizing committee of ICMEM 2016 Keywords: inertial navigation system, robots, gyroscop, accelerometer 1. Introduction Inertial navigation is a self-contained navigation technique in which measurements provided by accelerometers and gyroscopes are used to track the position and orientation of an object relative to a known starting point, orientation and velocity. -

Inertial Dynamometer for Shell Eco-Marathon Engine: Validation
ICEUBI2019 International Congress on Engineering — Engineering for Evolution Volume 2020 Conference Paper Inertial Dynamometer for Shell Eco-marathon Engine: Validation Daniel Filipe da Silva Cardoso, João Manuel Figueira Neves Amaro, and Paulo Manuel Oliveira Fael Universidade da Beira Interior Abstract This paper aims to validate the construction of an inertia dynamometer. These types of dynamometers allow easy characterization of internal combustion engines. To validate the dynamometer, tests were carried out with the same engine (Honda GX 160) installed in the UBIAN car and kart, which after calculating the inertia and measuring engine acceleration in each test performed, allows to create the torque characteristic curve from the engine. Keywords: Inertia, Dynamometer, Torque, Flywheel, UBIAN Corresponding Author: Daniel Filipe da Silva Cardoso [email protected] Received: 26 November 2019 1. Introduction Accepted: 13 May 2020 Published: 2 June 2020 This work was performed at the University of Beira Interior in order to study the engine Publishing services provided by currently used at UBIAN car. This is a car build by a team that participate in Shell Knowledge E Ecomarathon. The engine used is Honda GX 160 [1]. Daniel Filipe da Silva Cardoso et al. This article is distributed This article intends to focus on demonstrating and validating a simple system of under the terms of the Creative engine characterization. To make this validation three types of tests will be performed: Commons Attribution License, the first one coupling the engine on inertia dynamometer; the second one is done using which permits unrestricted use and redistribution provided that the whole vehicle; a third test, performed on a go kart, will be used as a control test. -

Autodyn Series Brochure
AUTODYN SERIES AUTODYN SERIES CHASSIS DYNAMOMETERS HAND HELD CONTROLLER EDDY CURRENT ABSORBERS VERSATILE Simple and accessible control To simulate real-world driving With upgradeable options and while testing conditions wheel base adjustment We Make It Better 1.262.252.4301 | www.powertestdyno.com | [email protected] | Sussex, WI, USA FEATURES THAT MATTER Push-Button Wheel Base Adjustment Push-button wheel base adjustment is not only convenient; it’s also the right way to accommodate AWD vehicles because it allows the vehicles to be loaded in the same position on the rolls every time. Non-adjustable cradle rolls systems that simply stack rolls together to accommodate AWD vehicles produce inconsistencies in testing as one vehicle might land between rolls and another may land on top of the rolls, creating a different testing environment for each vehicle. Trunnion Mounted Differentials Precision, trunnion mounted differentials allow individual torque measurement of each axle (AWD models) so you can see total torque through the RPM range and also the torque split between the front and rear axles to tune for drivability. They also allow accurate measurement of dyno losses so the inertia of the dyno does not affect the test results. Further, it means SuperFlow® dynos are not susceptible to inaccuracies based on heat in the dyno components like the differentials and couplings. 2 Eddy Current Absorption High capacity eddy current absorbers allow for both inertia and loaded testing. On all models, they’re coupled to each other and to the rolls with positive mechanical couplings like differentials and driveshafts. This allows accurate measurement of parasitic horsepower losses in each individual dyno we manufacture. -

Design and Implementation of a Small Electric Motor Dynamometer for Mechanical Engineering Undergraduate Laboratory Aaron Farley University of Arkansas, Fayetteville
University of Arkansas, Fayetteville ScholarWorks@UARK Theses and Dissertations 5-2012 Design and Implementation of a Small Electric Motor Dynamometer for Mechanical Engineering Undergraduate Laboratory Aaron Farley University of Arkansas, Fayetteville Follow this and additional works at: http://scholarworks.uark.edu/etd Part of the Electro-Mechanical Systems Commons Recommended Citation Farley, Aaron, "Design and Implementation of a Small Electric Motor Dynamometer for Mechanical Engineering Undergraduate Laboratory" (2012). Theses and Dissertations. 336. http://scholarworks.uark.edu/etd/336 This Thesis is brought to you for free and open access by ScholarWorks@UARK. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of ScholarWorks@UARK. For more information, please contact [email protected], [email protected]. DESIGN AND IMPLEMENTATION OF A SMALL ELECTRIC MOTOR DYNAMOMETER FOR MECHANICAL ENGINEERING UNDERGRADUATE LABORATORY DESIGN AND IMPLEMENTATION OF A SMALL ELECTRIC MOTOR DYNAMOMETER FOR MECHANICAL ENGINEERING UNDERGRADUATE LABORATORY A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering By Aaron Farley University of Arkansas Bachelor of Science in Mechanical Engineering, 2001 May 2012 University of Arkansas ABSTRACT This thesis set out to design and implement a new experiment for use in the second lab of the laboratory curriculum in the Mechanical Engineering Department at the University of Arkansas in Fayetteville, AR. The second of three labs typically consists of data acquisition and the real world measurements of concepts learned in the classes at the freshman and sophomore level. This small electric motor dynamometer was designed to be a table top lab setup allowing students to familiarize themselves with forces, torques, angular velocity and the sensors used to measure those quantities, i.e. -

Engineering Fit: Optimizing Design for Functional 3D Printed Assemblies
FORMLABS WHITE PAPER: Engineering Fit: Optimizing Design for Functional 3D Printed Assemblies Tolerance and fit are essential concepts that engineers use to optimize the functionality of mechanical assemblies and the cost of production. Formlabs extensively studies the accuracy of our materials and works to maximize repeatability between prints and across printers. The data and best practices in this white paper can help Form 2 users to design functional assemblies that work as intended, with the least amount of post-processing or trial-and-error. May 2017 Table of Contents Value of Tolerances in 3D Printing . 3 Fit Selection. 4 Measuring and Applying Tolerance. 6 Friction. 9 Lubrication . 11 Bonded Components. .11 Machining Printed Parts . 12 Conclusion . .13 FORMLABS WHITE PAPER: Engineering Fit: Optimizing Design for Functional 3D Printed Assemblies 2 Value of Tolerances in 3D Printing In traditional machining, tighter tolerances are exponentially related to increased cost. Tighter tolerances require additional and slower machining steps than wider tolerances. Machined parts are designed with the widest tolerances allowable for a given application. Unlike machining, where parts are progressively refined to tighter tolerances, stereolithography (SLA) has a single automated production phase. Proper dimensional tolerancing lowers post-processing time and ease of assembly, and reduces the material cost of iteration. Improper tolerances for a particular material can also result in broken parts, especially for press-fit components in brittle materials. With larger assemblies, or when producing multiples of something, proper dimensional tolerancing quickly becomes worthwhile. Basic Size Hole Shaft Tolerance is the predicted range of possible dimensions for parts at the time of manufacture. -

Considerations for Determining the Coefficient of Inertia Masses for A
sensors Article Considerations for Determining the Coefficient of Inertia Masses for a Tracked Vehicle 1 1 1 2, Octavian Alexa , Iulian Coropet, chi , Alexandru Vasile , Ionica Oncioiu * 1 and Lucian S, tefănit, ă Grigore 1 Military Technical Academy “FERDINAND I”, 39-49 George Cos, buc Av., 050141 Bucharest, Romania; [email protected] (O.A.); [email protected] (I.C.); [email protected] (A.V.); [email protected] (L.S, .G.) 2 Faculty of Finance-Banking, Accountancy and Business Administration, Titu Maiorescu University, 040051 Bucharest, Romania * Correspondence: [email protected]; Tel.: +40-372-710-962 Received: 8 August 2020; Accepted: 28 September 2020; Published: 29 September 2020 Abstract: The purpose of the article is to present a point of view on determining the mass moment of inertia coefficient of a tracked vehicle. This coefficient is very useful to be able to estimate the performance of a tracked vehicle, including slips in the converter. Determining vehicle acceleration plays an important role in assessing vehicle mobility. Additionally, during the transition from the Hydroconverter to the hydro-clutch regime, these estimations become quite difficult due to the complexity of the propulsion aggregate (engine and hydrodynamic transmission) and rolling equipment. The algorithm for determining performance is focused on estimating acceleration performance. To validate the proposed model, tests were performed to determine the equivalent reduced moments of inertia at the drive wheel (gravitational method) and the main components (three-wire pendulum method). The dynamic performances determined during the starting process are necessary for the validation of the general model for simulating the longitudinal dynamics of the vehicle. -
Making Things Move DIY Mechanisms for Inventors, Hobbyists, and Artists
Making Things Move DIY Mechanisms for Inventors, Hobbyists, and Artists Dustyn Roberts New York Chicago San Francisco Lisbon London Madrid Mexico City Milan New Delhi San Juan Seoul Singapore Sydney Toronto Copyright © 2011 by The McGraw-Hill Companies. All rights reserved. Except as permitted under the United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a database or retrieval system, without the prior written permission of the publisher. ISBN: 978-0-07-174168-2 MHID: 0-07-174168-2 The material in this eBook also appears in the print version of this title: ISBN: 978-0-07-174167-5, MHID: 0-07-174167-4. All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after every occurrence of a trade- marked name, we use names in an editorial fashion only, and to the benefi t of the trademark owner, with no intention of infringe- ment of the trademark. Where such designations appear in this book, they have been printed with initial caps. McGraw-Hill eBooks are available at special quantity discounts to use as premiums and sales promotions, or for use in corporate training programs. To contact a representative please e-mail us at [email protected]. Information has been obtained by McGraw-Hill from sources believed to be reliable. However, because of the possibility of hu- man or mechanical error by our sources, McGraw-Hill, or others, McGraw-Hill does not guarantee the accuracy, adequacy, or completeness of any information and is not responsible for any errors or omissions or the results obtained from the use of such information. -
ECE 40600 Capstone Senior Design Project II 5HP Dynamometer Retrofit
Purdue University Fort Wayne Department of Electrical and Computer Engineering ECE 40600 Capstone Senior Design Project II 5HP Dynamometer Retrofit Shehryar Azam <[email protected]> Benjamin Edwards <[email protected]> Joshua Durham <[email protected]> Matthew Gonzalez <[email protected]> Project Advisor: Dr. Chao Chen<[email protected]> Date: 05/03/2021 1 Table of Contents Acknowledgements . 7 Abstract . 8 1 Problem Statement . 9 1.1 Literature Survey . 9 1.2 Customer-Defined Constraints and Given Requirements . 9 1.3 Customer Needs and Functional Requirements for Design . 10 1.4 Applicable Engineering Standards . 11 1.5 Define Use Cases . 11 1.6 System Boundary . 12 1.7 Interface Requirements and Definitions. 1 4 2 Conceptual Design. 1 5 2.1 Product Design Decomposition (PDD). 1 5 2.2 Decision List. 17 2.3 Conceptual Design of Alternatives – Physical Solutions (PS) Selection . 18 3 Summary of the Evaluation of Design Alternatives. 20 3.1 Criteria for Selection and Testing Among Alternatives. 20 3.2 Evaluation of Software Design Alternatives . 21 3.3 Evaluation of Torque Transducer Alternatives . 22 3.4 Summary of Preliminary Design . .23 4 Detailed Design. 2 4 4.1 Design Description and Drawings . 2 4 4.2 Evaluation. 31 5 Cost Analysis. .. 32 5.1 BOM (Bill of Materials) . .. 32 6 Design Changes. .. 34 6.1 PC Hardware Change . .. 34 2 6.2 BOM Update. 35 6.3 Software Structure Change. 37 7 Building Process . .. 38 7.1 Hardware Construction . .. 38 7.2 Software Implementation. .. 46 7.3 User Interface. .. 51 7.4 Documentation. .. 54 8 Risk Analysis and Test Plan. -

We Make It Better
We Make It Better 262-252-4301 N60 W22700 Silver Spring Dr. 262-246-0436 Sussex, WI 53089 USA [email protected] www.powertestdyno.com ENGINE DYNAMOMETERS An engine dynamometer is a device used to test an engine that has been removed from a vehicle, ship, generator, or various other pieces of equipment. The purpose is to confirm performance before the engine is installed. Dynamometers can help facilities troubleshoot by determining an engine’s functionality while under load. They also verify the quality of builds, rebuilds, or repairs in a controlled environment before engines are put into use. Water Brake Eddy Current AC Series Water brake dynamometers are Specifically designed for small The AC Series Dynamometer ideal for higher power engines displacement diesel engines, generates electricity as a means with options ranging from 350 the Eddy Current (EC-Series) to absorb power from an engine to 10,000 HP. These dynos are engine dynamometer features under test. AC Dynos provide most cost effective for larger air-cooled, in-line eddy current incomparable responsiveness for internal combustion engines absorption utilizing electro- precision testing and can be used and electric motors. magnetic resistance. to supplement electrical power. Water Brake Dynamometers Our largest water brake dynamometers, the Power Test H36- Series engine dynos are designed for high torque, low speed diesel engine applications. They can be found servicing mining, construction, power generation, and marine propulsion industries around the world. Features • For high