1700 Animated Linkages
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Manufacturing Processes
Module 1 Classification of Metal Removal Processes and Machine tools Version 2 ME IIT, Kharagpur Lesson 2 Basic working principle, configuration, specification and classification of machine tools Version 2 ME IIT, Kharagpur Instructional Objectives At the end of this lesson, the students should be able to : (a) Describe the basic functional principles of machine tools (i) Illustrate the concept of Generatrix and Directrix (ii) Demonstrate Tool – work motions (iii) Give idea about machine tool drives (b) Show configuration of basic machine tools and state their uses (c) Give examples of machine tools - specification (d) Classify machine tools broadly. Basic functional principles of machine tool operations Machine Tools produce desired geometrical surfaces on solid bodies (preformed blanks) and for that they are basically comprised of; • Devices for firmly holding the tool and work • Drives for providing power and motions to the tool and work • Kinematic system to transmit motion and power from the sources to the tool-work • Automation and control systems • Structural body to support and accommodate those systems with sufficient strength and rigidity. For material removal by machining, the work and the tool need relative movements and those motions and required power are derived from the power source(s) and transmitted through the kinematic system(s) comprised of a number and type of mechanisms. (i) Concept of Generatrix and Directrix • Generation of flat surface The principle is shown in Fig. 2.1 where on a flat plain a straight line called Generatrix (G) is traversed in a perpendicular direction called Directrix (D) resulting a flat surface. • Generation of cylindrical surfaces The principles of production of various cylindrical surfaces (of revolution) are shown in Fig. -

Hydraulic Pumps, Motors and Accessories
Hydraulic pumps, motors and accessories The solution for all your hydraulic needs Content Sunfab history 3 Product overview 4 Pumps fixed single flow 6 Pumps fixed dual flow 12 Pumps variable flow 18 Motors fixed 20 Accessories 26 Development 30 Production 31 Our service features 32 Environment and Quality Assurance 33 Global presence 34 2 Our successes continue and we have only just started Sunfab develops, produces and sells components to operate hydraulic equipment within the area of mobile vehicles. The company Sunfab can trace its roots back to Sundins Fa- laid the foundation for the future successes of the new com- briker, a family company that was established as long ago pany, Sunfab. as 1925 and, for many years, was a successful manufacturer These days, Sunfab Hydraulics AB supplies companies with of skis. A fleet of vehicles ensured reliable transportation of some of the world’s most sophisticated products in its niche raw materials to the factory. Heavy, irrational loading and un- market. Products that meet stringent quality, environmen- loading gave Eric Sundin, the founder of the company, the tal and safety requirements and offer functional solutions. incentive required to develop cranes for the vehicles. We are just embarking on a long and successful journey of The first crane was built in 1947 by HIAB, a separate com- development. pany. As time went on, demands increased for greater capacity and, in 1954, a hydraulic pump was developed that 3 Product overview SAP 012-108 DIN SAP 084, 108 DIN SAP 084, 108 DIN SAPT 090, 130 DIN Single fl ow pumps Optimised Optimised for injector Sunfab is your supplier of a wide range of hydraulic pumps. -

Leveling the Head the Head of the Carvewright Machine Can Be Moved up Or Down to Accommodate Different Material Thicknesses
Leveling the Head The head of the CarveWright machine can be moved up or down to accommodate different material thicknesses. It is guided vertically by four guide posts located at the corners of the machine and driven by a leadscrew on either side of the machine located between the posts. The leadscrew adjacent to the keypad is driven by the crank and it is tied rotationally to the opposite leadscrew by the long tierod located in the base of the machine. It is critical that the head is level at all times or it will bind and become difficult to move up and down. While extremely rare, the head can become unlevel for several reasons. The cause behind the loss of head level needs to be understood before the machine repair is completed. Common causes for loss of head level are: a loose leadscrew nut, a stripped gear between the end of the tierod and leadscrew, or a broken base that allows the tierod to become disengaged from one of the leadscrews. To level the head you will need the following tools: • #2 Phillips screwdriver bit and drill • 10mm Socket and ratcheting wrench • Large Crescent wrench (2X) 1. Ready the machine. Unplug the machine from the power outlet and place it on a stable work platform. Raise the head up several inches and move the Y-truck to the center of the machine for best access. Remove the dust collection bag from the back of the machine. 2. Adjust the head height. Crank the head up toward the top of the machine. -
Unit 10 Lubricating Systems
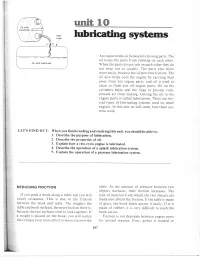
unit 10 FUEL TANK lubricating systems An engine needs oil between its moving parts. The oil keeps the parts from rubbing on each other. When the parts do not rub on each other they do not wear out as quickly. The parts also move more easily, because the oil prevents friction. The oil also helps cool the engine by carrying heat away from hot engine parts, and oil is used to clean or flush dirt off engine parts. Oil on the cylinders helps seal the rings to prevent com• pressed air from leaking. Getting the oil to the engine parts is called lubrication. There are sev• eral types of lubricating systems used on small engines. In this unit we will study how these sys• tems work. LET'S FIND OUT: When you finish reading and studying this unit, you should be able to: 1. Describe the purpose of lubrication. 2. Describe the properties of oil. 3. Explain how a two-cycle engine is lubricated. 4. Describe the operation of a splash lubrication system. 5. Explain the operation of a pressure lubrication system. REDUCING FRICTION table. As the amount of pressure between two objects increases, their friction increases. The If you push a book along a table top you will type of material from which the two objects are notice resistance. This is due to the friction made also affects the friction. If the table is made between the book and table. The rougher the of glass, the book slides across it easily. If it is table and book surfaces, the more friction there is, made of rubber, it is very difficult to push the because the two surfaces tend to lock together. -

Safety Warnings
SAFETY INFORMATION Doc ID: 192-297A Doc Revision: 010418 Improper installation, service or maintenance of this product can cause death, serious injury, and/or property damage. • Only a trained and qualified mechanic should install this product. • Read these directions thoroughly before installation. • For assistance or additional information, please call Rekluse Motor Sports. Failure to become familiar with Rekluse auto clutch operation before use can cause death, serious injury, and/or property damage. • Completely familiarize yourself with the operation of the Rekluse auto clutch. • Do NOT allow anyone unfamiliar with the operation of the Rekluse auto clutch to operate a Rekluse auto clutch equipped motorcycle. • Do NOT attempt to ride a Rekluse auto clutch equipped motorcycle on public roads until you are completely familiarized with the operation of this product. • First practice riding Rekluse auto clutch equipped motorcycles in a safe area free of obstructions. A Rekluse auto clutch can engage suddenly and cause death, serious injury, and/or property damage. Loss of control can result from sudden and unexpected engagement of the clutch from a free-wheeling state. Rear tire may slow from the engine's compression braking effect and cause the rear tire to skid. • Always select a suitable transmission gear for your ground speed, engine RPM and terrain. • Release the clutch lever slowly and apply a small amount of throttle to control engine compression braking after downshifting. See installation and/or user’s guide for more information about free-wheeling. Rekluse auto clutch can make your motorcycle appear to be in neutral when in gear, even when the engine is running and clutch lever released. -

Mission CO2 Reduction: the Future of the Manual Transmission: Schaeffler
56 57 Mission CO2 Reduction The future of the manual transmission N X D H I O E A S M I O U E N L O A N G A D F J G I O J E R U I N K O P J E W L S P N Z A D F T O I E O H O I O O A N G A D F J G I O J E R U I N K O P O A N G A D F J G I O J E R A N P D H I O E A S M I O U E N L O A N G A D F O I E R N G M D S A U K Z Q I N K J S L O G D W O I A D U I G I R Z H I O G D N O I E R N G M D S A U K N M H I O G D N O I E R N G U O I E U G I A F E D O N G I U A M U H I O G D V N K F N K K R E W S P L O C Y Q D M F E F B S A T B G P D R D D L R A E F B A F V N K F N K R E W S P D L R N E F B A F V N K F N W F I E P I O C O M F O R T O P S D C V F E W C G M J B J B K R E W S P L O C Y Q D M F E F B S A T B G P D B D D L R B E Z B A F V R K F N K R E W S P Z L R B E O B A F V N K F N J V D O W R E Q R I U Z T R E W Q L K J H G F D G M D S D S B N D S A U K Z Q I N K J S L W O I E P JürgenN N B KrollA U A H I O G D N P I E R N G M D S A U K Z Q H I O G D N W I E R N G M D G G E E A Y W T R D E E S Y W A T P H C E Q A Y Z Y K F K F S A U K Z Q I N K J S L W O Q T V I E P MarkusN Z R HausnerA U A H I R G D N O I Q R N G M D S A U K Z Q H I O G D N O I Y R N G M D T C R W F I J H L M L K N I J U H B Z G V T F C A K G E G E F E Q L O P N G S A Y B G D S W L Z U K RolandO G I SeebacherK C K P M N E S W L N C U W Z Y K F E Q L O P P M N E S W L N C T W Z Y K W P J J V D G L E T N O A D G J L Y C B M W R Z N A X J X J E C L Z E M S A C I T P M O S G R U C Z G Z M O Q O D N V U S G R V L G R M K G E C L Z E M D N V U S G R V L G R X K G K T D G G E T O -

Shlall RACING CARS.* by HN CHARLES, B.Sc.7
500 THE INSTITUTION OF AUTOMOBILE ENGINEERS. ShlALL RACING CARS.* By H. N. CHARLES, B.Sc.7 (ASSOCIATEMEMBER.) February, 1935. INTRODUCTION. It is undeniable that everybody with a normal sense of values enjoys a clean sporting contest of any kind between adversaries who are fairly and evenly matched. To make the contest a real test of merit it must take place in public, and must be in accordance with the accepted rules. The above requirements are met by motor racing, since thousands of people witness the great long-distance motor races of the present day. The rules usually are also comparatively strict, and fine sportsmanship frequently exists in addition, in connexion with honouring the unwritten rules of the motor racing game. It has been the author’s good fortune during the last few years to be entrusted with the dcsigning of a number of types of what, for the want of a better term, may be briefly described as “ small racing cars.” The work, as it happens, has been entirely carried out for one Company, whose drawing office and experimental depart- ment are combined under his care. Having previously been in daily contact at different times with motor-cycle engines, airship engines, both rotary and stationary aeroplane engines, and a variety of accessories connected with the various types, it was at first some- what difficult to go back to the beginning and start with small engines all over again, but there is a great fascination about these small units, because they provide an almost ideal ground for experiment, the cost of which is greatly reduced by the small size of the parts involved. -

MSC.ADAMS Functions
COSMOSMotion User’s Guide COPYRIGHT NOTICE Copyright © 20023by Structural Research and Analysis Corp, All rights reserved. Portions Copyright © 1997-2003 by MSC.Software Corporation. All rights reserved. U. S. Government Restricted Rights: If the Software and Documentation are provided in connection with a government contract, then they are provided with RESTRICTED RIGHTS. Use, duplication or disclosure is subject to restrictions stated in paragraph (c)(1)(ii) of the Rights in Technical Data and Computer Software clause at 252.227-7013. MSC.Software. 2 MacArthur Place, Santa Ana, CA 92707. Information in this document is subject to change without notice. This document contains proprietary and copyrighted information and may not be copied, reproduced, translated, or reduced to any electronic medium without prior consent, in writing, from MSC.Software Corporation. REVISION HISTORY First Printing December 2001 Second Printing September 2002 Third Printing August 2003 TRADEMARKS MSC.ADAMS is a registered United States trademark and MSC.ADAMS/Solver, MSC.ADAMS/Kinematics, MSC.ADAMS/View, and COSMOSMotion are trademarks of MSC.Software. SolidWorks, FeatureManager, SolidBasic, and RapidDraft are trademarks of SolidWorks Corporation. Windows is a registered trademark of MicroSoft Corporation. All other brands and product names are the trademarks of their respective holders. Table of Contents Table of Contents...........................................................................................................................i 1 COSMOSMotion........................................................................................................... -

Forklift Differentials
Forklift Differentials Forklift Differential - A mechanical device which could transmit rotation and torque through three shafts is known as a differential. At times but not at all times the differential would use gears and will operate in two ways: in automobiles, it provides two outputs and receives one input. The other way a differential works is to combine two inputs in order to produce an output that is the sum, average or difference of the inputs. In wheeled vehicles, the differential enables all tires to be able to rotate at various speeds while supplying equal torque to all of them. The differential is intended to drive a pair of wheels with equivalent torque while enabling them to rotate at various speeds. While driving around corners, a car's wheels rotate at different speeds. Several vehicles such as karts operate without using a differential and use an axle instead. If these vehicles are turning corners, both driving wheels are forced to spin at the same speed, normally on a common axle which is driven by a simple chain-drive mechanism. The inner wheel should travel a shorter distance compared to the outer wheel while cornering. Without using a differential, the effect is the outer wheel dragging and or the inner wheel spinning. This puts strain on drive train, causing unpredictable handling, difficult driving and damage to the tires and the roads. The amount of traction necessary to move the car at whichever given moment depends on the load at that moment. How much drag or friction there is, the car's momentum, the gradient of the road and how heavy the automobile is are all contributing factors. -

The Jansen Linkage Kyra Rudy, Lydia Fawzy, Santino Bianco, Taylor Santelle Dr
The Jansen Linkage Kyra Rudy, Lydia Fawzy, Santino Bianco, Taylor Santelle Dr. Antonie J. (Ton) van den Bogert Applications and Abstract Advancements The Jansen linkage is an eleven-bar mechanism Currently, the primary application of the Jansen designed by Dutch artist Theo Jansen in his linkage is walking motion used in legged robotics. In collection “Strandbeest.” The mechanism is crank order to create a robot that can move independently, driven and mimics the motion of a leg. Its scalable a minimum of three linkage attached to a motor are design, energy efficiency, and deterministic foot required. An agile and fluid motion is created by the trajectory show promise of applicability in legged linkage.With the linkage’s mobility, robots are robotics. Theo Jansen himself has demonstrated capable of moving both forwards and backwards and pivoting left to right without compromising equal the usefulness of the mechanism through his traction. The unique gait pattern of the mechanism "standbeest” sculptures that utilize duplicates of the allows digitigrade movement, step climbing, and linkage whose cranks are turned by wind sails to obstacle evasion. However, the gait pattern is produce a walking motion. The motion yielded is maladaptive which limits its jam avoidance. smooth flowing and relatively agile. Because the linkage has been recently invented within the last few decades, walking movement is currently the primary application. Further investigation and optimization could bring about more useful applications that require a similar output path when simplicity in design is necessary. The Kinematics The Jansen linkage is a one degree of freedom, Objective planar, 11 mobile link leg mechanism that turns the The Jansen linkage is an important building The objective of this poster is to show the rotational movement of a crank into a stepping motion. -

Technical Engineering Guide
TTEECHCHNINICALCAL EN ENGGINEEINEERRININGG 89 www.diamondchain.com TECHNICAL ENGINEERING General Drive Considerations One of the main advantages of the roller chain drive is its ability to perform well under widely varying conditions. Despite this ability, there are a number of rules of good design practice which, if considered early in the design pro- cess, will enable the user to obtain desirable results. Basic dimensions and minimum ultimate tensile requirements for single-pitch, double-pitch and attachment roller chains are specified by various standards organizations worldwide. ASME/ANSI, The American Society of Mechanical Engineers and The American National Standards Institute, defines dimensions such as: pitch, roller width, roller diameter, link plate height, link plate thickness and pin diameter. The primary purpose of the standard is to ensure that manufacturers will produce chains and sub-assemblies that are similar dimensionally and therefore interchangeable. In addition, the standard does offer the user some assurance of quality by defining a minimum ultimate tensile strength for each model of chain. However, tensile strength is not always a valid method to differentiate one manufacturer’s product from another. It is very important to remember that dimensional standardization does not define quality or performance characteristics. Minimum Ultimate Tensile Strength: Minimum Ultimate Tensile Strength, MUTS, is the static load required to break the chain. Tensile strength values shown in this catalog are not allowable working loads. Load or tension applied 1 to the chain in service should never exceed ⁄6 th of the UTS. If exceeding this value is necessary for a specific applica- tion, contact Diamond Chain. -

Robot Control and Programming: Class Notes Dr
NAVARRA UNIVERSITY UPPER ENGINEERING SCHOOL San Sebastian´ Robot Control and Programming: Class notes Dr. Emilio Jose´ Sanchez´ Tapia August, 2010 Servicio de Publicaciones de la Universidad de Navarra 987‐84‐8081‐293‐1 ii Viaje a ’Agra de Cimientos’ Era yo todav´ıa un estudiante de doctorado cuando cayo´ en mis manos una tesis de la cual me llamo´ especialmente la atencion´ su cap´ıtulo de agradecimientos. Bueno, realmente la tesis no contaba con un cap´ıtulo de ’agradecimientos’ sino mas´ bien con un cap´ıtulo alternativo titulado ’viaje a Agra de Cimientos’. En dicho capitulo, el ahora ya doctor redacto´ un pequeno˜ cuento epico´ inventado por el´ mismo. Esta pequena˜ historia relataba las aventuras de un caballero, al mas´ puro estilo ’Tolkiano’, que cabalgaba en busca de un pueblo recondito.´ Ya os podeis´ imaginar que dicho caballero, no era otro sino el´ mismo, y que su viaje era mas´ bien una odisea en la cual tuvo que superar mil y una pruebas hasta conseguir su objetivo, llegar a Agra de Cimientos (terminar su tesis). Solo´ deciros que para cada una de esas pruebas tuvo la suerte de encontrar a una mano amiga que le ayudara. En mi caso, no voy a presentarte una tesis, sino los apuntes de la asignatura ”Robot Control and Programming´´ que se imparte en ingles.´ Aunque yo no tengo tanta imaginacion´ como la de aquel doctorando para poder contaros una historia, s´ı que he tenido la suerte de encontrar a muchas personas que me han ayudado en mi viaje hacia ’Agra de Cimientos’. Y eso es, amigo lector, al abrir estas notas de clase vas a ser testigo del final de un viaje que he realizado de la mano de mucha gente que de alguna forma u otra han contribuido en su mejora.