Corona KH-4B Satellites
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AIRLIFT RODEO a Brief History of Airlift Competitions, 1961-1989
"- - ·· - - ( AIRLIFT RODEO A Brief History of Airlift Competitions, 1961-1989 Office of MAC History Monograph by JefferyS. Underwood Military Airlift Command United States Air Force Scott Air Force Base, Illinois March 1990 TABLE OF CONTENTS Foreword . iii Introduction . 1 CARP Rodeo: First Airdrop Competitions .............. 1 New Airplanes, New Competitions ....... .. .. ... ... 10 Return of the Rodeo . 16 A New Name and a New Orientation ..... ........... 24 The Future of AIRLIFT RODEO . ... .. .. ..... .. .... 25 Appendix I .. .... ................. .. .. .. ... ... 27 Appendix II ... ...... ........... .. ..... ..... .. 28 Appendix III .. .. ................... ... .. 29 ii FOREWORD Not long after the Military Air Transport Service received its air drop mission in the mid-1950s, MATS senior commanders speculated that the importance of the new airdrop mission might be enhanced through a tactical training competition conducted on a recurring basis. Their idea came to fruition in 1962 when MATS held its first airdrop training competition. For the next several years the competition remained an annual event, but it fell by the wayside during the years of the United States' most intense participation in the Southeast Asia conflict. The airdrop competitions were reinstated in 1969 but were halted again in 1973, because of budget cuts and the reduced emphasis being given to airdrop operations. However, the esprit de corps engendered among the troops and the training benefits derived from the earlier events were not forgotten and prompted the competition's renewal in 1979 in its present form. Since 1979 the Rodeos have remained an important training event and tactical evaluation exercise for the Military Airlift Command. The following historical study deals with the origins, evolution, and results of the tactical airlift competitions in MATS and MAC. -
Ground Truth: Corona Landmarks Ground Truth: Corona Landmarks an Introduction
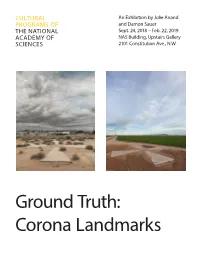
CULTURAL An Exhibition by Julie Anand PROGRAMS OF and Damon Sauer THE NATIONAL Sept. 24, 2018 – Feb. 22, 2019 ACADEMY OF NAS Building, Upstairs Gallery SCIENCES 2101 Constitution Ave., N.W. Ground Truth: Corona Landmarks Ground Truth: Corona Landmarks An Introduction In this series of images of what remains of the Corona project, Julie Anand and Damon Sauer investigate our relationship to the vast networks of information that encircle the globe. The Corona project was a CIA and U.S. Air Force surveillance initiative that began in 1959 and ended in 1972. It involved using cameras on satellites to take aerial photographs of the Soviet Union and China. The cameras were calibrated with concrete targets on the ground that are 60 feet in diameter, which provided a reference for scale and ensured images were in focus. Approximately 273 of these concrete targets were placed on a 16-square-mile grid in the Arizona des- ert, spaced a mile apart. Long after Corona’s end and its declassification in 1995, around 180 remain, and Anand and Sauer have spent three years photographing them as part of an ongoing project. In their images, each concrete target is overpowered by an expansive sky, onto which the artists map the paths of orbiting satellites that were present at the Calibration Mark AG49 with Satellites moment the photograph was taken. For Anand and 2016 Sauer, “these markers of space have become archival pigment print markers of time, representing a poignant moment 55 x 44 inches in geopolitical and technologic social history.” A few of the calibration markers like this one are made primarily of rock rather than concrete. -

Jacques Tiziou Space Collection
Jacques Tiziou Space Collection Isaac Middleton and Melissa A. N. Keiser 2019 National Air and Space Museum Archives 14390 Air & Space Museum Parkway Chantilly, VA 20151 [email protected] https://airandspace.si.edu/archives Table of Contents Collection Overview ........................................................................................................ 1 Administrative Information .............................................................................................. 1 Biographical / Historical.................................................................................................... 1 Scope and Contents........................................................................................................ 2 Arrangement..................................................................................................................... 2 Names and Subjects ...................................................................................................... 2 Container Listing ............................................................................................................. 4 Series : Files, (bulk 1960-2011)............................................................................... 4 Series : Photography, (bulk 1960-2011)................................................................. 25 Jacques Tiziou Space Collection NASM.2018.0078 Collection Overview Repository: National Air and Space Museum Archives Title: Jacques Tiziou Space Collection Identifier: NASM.2018.0078 Date: (bulk 1960s through -

National Reconnaissance Office Review and Redaction Guide
NRO Approved for Release 16 Dec 2010 —Tep-nm.T7ymqtmthitmemf- (u) National Reconnaissance Office Review and Redaction Guide For Automatic Declassification Of 25-Year-Old Information Version 1.0 2008 Edition Approved: Scott F. Large Director DECL ON: 25x1, 20590201 DRV FROM: NRO Classification Guide 6.0, 20 May 2005 NRO Approved for Release 16 Dec 2010 (U) Table of Contents (U) Preface (U) Background 1 (U) General Methodology 2 (U) File Series Exemptions 4 (U) Continued Exemption from Declassification 4 1. (U) Reveal Information that Involves the Application of Intelligence Sources and Methods (25X1) 6 1.1 (U) Document Administration 7 1.2 (U) About the National Reconnaissance Program (NRP) 10 1.2.1 (U) Fact of Satellite Reconnaissance 10 1.2.2 (U) National Reconnaissance Program Information 12 1.2.3 (U) Organizational Relationships 16 1.2.3.1. (U) SAF/SS 16 1.2.3.2. (U) SAF/SP (Program A) 18 1.2.3.3. (U) CIA (Program B) 18 1.2.3.4. (U) Navy (Program C) 19 1.2.3.5. (U) CIA/Air Force (Program D) 19 1.2.3.6. (U) Defense Recon Support Program (DRSP/DSRP) 19 1.3 (U) Satellite Imagery (IMINT) Systems 21 1.3.1 (U) Imagery System Information 21 1.3.2 (U) Non-Operational IMINT Systems 25 1.3.3 (U) Current and Future IMINT Operational Systems 32 1.3.4 (U) Meteorological Forecasting 33 1.3.5 (U) IMINT System Ground Operations 34 1.4 (U) Signals Intelligence (SIGINT) Systems 36 1.4.1 (U) Signals Intelligence System Information 36 1.4.2 (U) Non-Operational SIGINT Systems 38 1.4.3 (U) Current and Future SIGINT Operational Systems 40 1.4.4 (U) SIGINT -

A4e,,Moct Elel-Tl7s4'ste1s
SPACE STATION THERMAL CONTROL SURFACES C. R. Maag M. T. Grenier VOLUME It - LITERATURE SEARCH PREPARED FOR NATIONAL AERONAUTICS AND SPACE ADMINISTRATION MARSHALL SPACE FLIGHT CENTER, ALABAMA 35812 CONTRACT NAS 8-32637 Report 5666 March 1978 Volume I[ A4E,,MOCT ELEL-TL7S4'STE1S AZUSA. CALIFORNIA S(NASA-CE-150668) SPACE STA TION THERMA1. N78-22137 CONTPBOL SURFACES. VOLUME 2: LITERATURE SEARCH Interim Report, 4 Aug. 1977 - 4 Feb. 1978 (Aerojet Electrosystems Co-) 410 p Unclas BC A18/MF A01 CSCI 05A GI3/15 645 Report 5666 FOREWORD This interim report describes results of the first six months of a study on Contract NAS 8-32637, "Space Station Thermal Control Surfaces." The contract was initiated on 4 August 1977 as a-6-month study to assess the deficiencies between the state of the art in thermal--control surface technology and that which would be required for both a 25-kW power module and a 25-year mission space station. The Scope of Work of the contract has been modified to include ad ditional emphasis on Task I, "Requirements Analysis," and the period of per formance will be extended for an additional eight months of effort. The final report is being deferred until the end of the extended period of performance. This report covers the period of 4 August 1977 to 4 February 1978,) and is submitted in two volumes. The literature search and survey portion of this study are contained in Volume II. This study was performed by personnel of Aerojet ElectroSystems Company, for the Space Sciences Laboratory of NASA-Marshall Flight Center. -

CORONA Program 1 1
CIA Cotd War Records Series Editor in Chief J. Kenneth McDonald CIA Documents on the Cuban Missile Crisis, 1962, Mary S. McAuliffe, editor ( 1992) Selected Estimates un the Soviet Union, 1950-19.59, Scott A. Koch, editor (1993) The CIA under Harry Truman, Michael S. Warner, editor (1994) Kevin C. Ruffner Editor History Staff Center for the Study of Intelligence Central Intelligence Agency Washington, D-C. 1995 These documents have been approved for release through the Historical Review Program of the Central Intelligence Agency. US Government officials may obtain additional copies of this docu- ment directly through liaison channels from the Central Intelligence Agency. Requesters outside the US Government may obtain subscriptions to CIA publications similar to this one by addressing inquiries to: Document Expedition (DOCEX) Project Exchange and Gift Division Library of Congress Washing$on, DC 20540 or: National Technical Information Service 5285 Port Royal Road Springfield, VA 22161 Requesters outside the US Government not interested in subscription service may purchase specific publications either in paper copy or microform from: Photoduplication Service Library of Congress Washington, DC 20540 or: National Ttinicai Information Service 5285 Port Royal Road Springfield, VA 22161 (to expedite service call the NTIS Order Desk 703-487-4650) Comments and queries on this paper may be directed to the DOCEX Project at the above address or by phone (202-707-9527), or the NTIS Office of Customer Service at the above address or by phone (70%487- 4660). Publications are not available to the public from the Central Intelligence Agency. Requesters wishing to obtain copies of these and other declassified doc- uments may contact: Military Reference Branch (NNRM) Textual Reference Division National Archives aud Records Administration Washington, DC 20408 Contents PaRe Foreword xi . -
2015 BJCP Beer Style Guidelines
BEER JUDGE CERTIFICATION PROGRAM 2015 STYLE GUIDELINES Beer Style Guidelines Copyright © 2015, BJCP, Inc. The BJCP grants the right to make copies for use in BJCP-sanctioned competitions or for educational/judge training purposes. All other rights reserved. Updates available at www.bjcp.org. Edited by Gordon Strong with Kristen England Past Guideline Analysis: Don Blake, Agatha Feltus, Tom Fitzpatrick, Mark Linsner, Jamil Zainasheff New Style Contributions: Drew Beechum, Craig Belanger, Dibbs Harting, Antony Hayes, Ben Jankowski, Andew Korty, Larry Nadeau, William Shawn Scott, Ron Smith, Lachlan Strong, Peter Symons, Michael Tonsmeire, Mike Winnie, Tony Wheeler Review and Commentary: Ray Daniels, Roger Deschner, Rick Garvin, Jan Grmela, Bob Hall, Stan Hieronymus, Marek Mahut, Ron Pattinson, Steve Piatz, Evan Rail, Nathan Smith,Petra and Michal Vřes Final Review: Brian Eichhorn, Agatha Feltus, Dennis Mitchell, Michael Wilcox TABLE OF CONTENTS 5B. Kölsch ...................................................................... 8 INTRODUCTION TO THE 2015 GUIDELINES............................. IV 5C. German Helles Exportbier ...................................... 9 Styles and Categories .................................................... iv 5D. German Pils ............................................................ 9 Naming of Styles and Categories ................................. iv Using the Style Guidelines ............................................ v 6. AMBER MALTY EUROPEAN LAGER .................................... 10 Format of a -

Space and Defense Issue
33SPAC E and DEFENSE Volume Eleven Number One Spring 2019 China’s Military Space Strategy Sam Rouleau Volume Five Number One Communicating Cyber Consequences Sum Timothy Goines mer 2011 Why Brazil Ventured a Nuclear Program Saint-Clair Lima da Silva Arms Control & Deterrence Coalitions in Space:Damon Coletta Where Networks are CadetPower Voice—Curious Trinity: War, Media, Public Opinion byLaura James Olson Clay Moltz The 2010 National Space Policy: Down to Earth? by Joan Johnson-Freese Space & Defense Journal of the United States Air Force Academy Eisenhower Center for Space and Defense Studies Publisher Col. Kris Bauman, [email protected] Director, Eisenhower Center for Space and Defense Studies Editors Dr. Damon Coletta Dr. Michelle Black U.S. Air Force Academy, USA University of Nebraska, Omaha Associate Editors Mr. Deron Jackson Dr. Peter Hays U.S. Air Force Academy, USA George Washington University, USA Dr. Schuyler Foerster Ms. Jonty Kasku-Jackson U.S. Air Force Academy, USA National Security Space Institute, USA Thank You to Our Reviewers Andrew Aldrin Christopher Dunlap United Launch Alliance, USA Naval Postgraduate School, USA James Armor Paul Eckart ATK, USA Boeing, USA William Barry Andrew Erickson NASA Headquarters, USA Naval War College, USA Daniel Blinder Joanne Gabrynowicz UNSAM-CONICET, Argentina University of Mississippi, USA Robert Callahan Jason Healey NORAD-NORTHCOM, USA Atlantic Council, USA James Cameron Stephen Herzog Fundação Getúlio Vargas, Brazil Yale University, USA Robert Carriedo Theresa Hitchens U.S. -
Acquisition of Space Systems, Volume 7: Past Problems and Future Challenges
YOOL KIM, ELLIOT AXELBAND, ABBY DOLL, MEL EISMAN, MYRON HURA, EDWARD G. KEATING, MARTIN C. LIBICKI, BRADLEY MARTIN, MICHAEL E. MCMAHON, JERRY M. SOLLINGER, ERIN YORK, MARK V. A RENA, IRV BLICKSTEIN, WILLIAM SHELTON ACQUISITION OF SPACE SYSTEMS PAST PROBLEMS AND FUTURE CHALLENGES VOLUME 7 C O R P O R A T I O N For more information on this publication, visit www.rand.org/t/MG1171z7 Library of Congress Control Number: 2015933393 ISBN: 978-0-8330-8895-6 Published by the RAND Corporation, Santa Monica, Calif. © Copyright 2015 RAND Corporation R® is a registered trademark. Cover image: United Launch Alliance Limited Print and Electronic Distribution Rights This document and trademark(s) contained herein are protected by law. This representation of RAND intellectual property is provided for noncommercial use only. Unauthorized posting of this publication online is prohibited. Permission is given to duplicate this document for personal use only, as long as it is unaltered and complete. Permission is required from RAND to reproduce, or reuse in another form, any of its research documents for commercial use. For information on reprint and linking permissions, please visit www.rand.org/pubs/permissions.html. The RAND Corporation is a research organization that develops solutions to public policy challenges to help make communities throughout the world safer and more secure, healthier and more prosperous. RAND is nonprofit, nonpartisan, and committed to the public interest. RAND’s publications do not necessarily reflect the opinions of its research clients and sponsors. Support RAND Make a tax-deductible charitable contribution at www.rand.org/giving/contribute www.rand.org Preface Space systems deliver critical capability to warfighters; thus, acquiring and deploying space systems in a timely and affordable manner is important to U.S. -
Tracking Mobile Devices to Fight Coronavirus
BRIEFING Tracking mobile devices to fight coronavirus SUMMARY Governments around the world have turned to digital technologies to tackle the coronavirus crisis. One of the key measures has been to use mobile devices to monitor populations and track individuals who are infected or at risk. About half of the EU’s Member States have taken location-tracking measures in response to the spread of the coronavirus disease, mainly by working with telecommunications companies to map population movements using anonymised and aggregate location data and by developing applications (apps) for tracking people who are at risk. The European Commission has called for a common EU approach to the use of mobile apps and mobile data to assess social distancing measures, support contact-tracing efforts, and contribute to limiting the spread of the virus. While governments may be justified in limiting certain fundamental rights and freedoms in order to take effective steps to fight the epidemic, such exceptional and temporary measures need to comply with applicable fundamental rights standards and EU rules on data protection and privacy. This briefing discusses location-tracking measures using mobile devices in the context of the Covid-19 crisis. It describes initiatives in EU Member States and provides a brief analysis of fundamental rights standards and the EU policy framework, including applicable EU rules on data protection and privacy. In this Briefing Digital technologies against pandemics Location tracking International context Situation in EU Member States -

THE EISENHOWER ADMINISTRATION's ROAD to SPACE MILITARIZATION by Peter Pindjak B.A., B.M., Northwestern State University Of
THE EISENHOWER ADMINISTRATION’S ROAD TO SPACE MILITARIZATION by Peter Pindjak B.A., B.M., Northwestern State University of Louisiana, 2009 Submitted to the Graduate Faculty of Graduate School of Public and International Affairs in partial fulfillment of the requirement for the degree of Master of Public and International Affairs University of Pittsburgh 2011 Graduate School of Public and International Affairs University of Pittsburgh Thesis Committee Mr. Dennis Gormley Chairman Dr. William Dunn Member Dr. Forrest Morgan Member Dr. Phil Williams Member Defended on April 14, 2011 ii ABSTRACT The thesis examines the Eisenhower administration’s decisions to use space for intelligence and military purposes. The first two chapters cover historical developments spanning the period from 1945 to 1952 as well as the first two years of the Eisenhower presidency (1953-1954). The third chapter provides a detailed analysis of U.S. space policies from 1955 to 1961. In particular, Chapter III takes a close look at the U.S. military space program as well as the prospect for space arms control. Organized chronologically, the thesis draws on publicly available documents, including declassified documents deposited at the Dwight D. Eisenhower Library in Abilene, Kansas. By examining significant National Security Council (NSC) documents, including reports and meeting notes, the thesis presents an argument that since the very beginning, U.S. space policy included a provision for intelligence and military applications of satellites as a matter of national security. Throughout the Eisenhower presidency, the concept of “peaceful” use of outer space, which did not preclude satellites from having certain military applications, was never questioned at the NSC. -

Download the Issue As A
SPRING 2008 - Volume 55, Number 1 WWW.AFHISTORICALFOUNDATION.ORG Features The Things We Are: Air Force Heritage and History in Artifacts Jeff Duford 4 A Visionary Ahead of his Time: Howard Hughes and the U.S. Air Force —Part II: The Hughes D–2 and the XF–11 Thomas Wildenberg 16 X–15B: Pursuit of Early Orbital Human Spaceflight L. Parker Temple, III 28 Chasing the XB–70A Valkyrie George J. Marrett 42 Book Reviews Aviator of Fortune: Lowell Yerex and the Anglo-American Commercial Rivalry, 1931-1946 By Erik Benson Reviewed by John Barnhill 48 No End in Sight: The Continuing Menace of Nuclear Proliferation By Nathan E. Busch Reviewed by David J. Schepp 48 Spy Satellites and Other Technologies that Changed History By Thomas A. Graham & Keith A. Hansen Reviewed by Rick W. Sturdevant 49 The AEF Way of War: The American Army and Combat in World War I By Mark Ethan Grotelueschen Reviewed by Jeffrey P. Joyce 49 Shadow and Stinger: Developing the AC-119G/K Gunships in the Vietnam War By William P. Head Reviewed by Steven A. Pomeroy 50 Farmans and SIAs: U.S. Army Aviation Training and Combat in Italy with Fiorello La Guardia By Jack B. Hilliard Reviewed by Thomas Wildenberg 50 Unconquerable Nation: Knowing Our Enemy, Strengthening Ourselves By Brian Michael Jenkins Reviewed by Curtis Hooper O’Sullivan 51 Chronological Encyclopedia of Soviet Single-Engined Fighters 1939-1951 By Herbert Léonard Reviewed by Carl J. Bobrow 51 On “Other War”: Lessons from Five Decades of RAND Counterinsurgency Research By Austin Long Reviewed by John L.