New Possibilities of Railway Traffic Control Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lubomír Macháček: „Zabezpečováka“ Ze Mě Udělala Tragická Mimořádná Událost
ČTVRTLETNÍK AŽD BEZPEČNĚ K CÍLI 1 | 2020 Lubomír Macháček: „Zabezpečováka“ ze mě udělala tragická mimořádná událost REPORTÉR AŽD PRAHA • 1/2018 | 1 | LITOMĚŘICE HORNÍ NÁDRAŽÍ – MOST VLAKEM RYCHLEJI www.svestkovadraha.cz Z OBsAHU 18 • Jízda RYchlosTÍ 200 KM/H POD DOHLEDEM ETCS LEVEL 2 správa železnic zorganizovala na přelomu roku 2019/2020 mezi Břeclaví a Brnem několik testovacích jízd rychlostí 200 km/h. Provedení těchto jízd bylo zajištěno společností ČD cargo a byly vedeny lokomotivou řady 383 (Vectron). Jak probíhal dohled nad vlastní jízdou vlaku mobilní částí ETCS a jaké musely být provedeny úpravy traťové části ETCS z produkce AŽD? 36 • ŠVEstková dráha TEstuje BEZúdržbový provoz Na takzvané Švestkové dráze (Čížkovice–Obrnice) připra- vuje její vlastník společnost AŽD přechod na bezúdržbový provoz. Bude se jednat o první železniční trať v naší zemi, která kromě pravidelných preventivních údržbových zásahů nebude potřebovat ani takzvané pochůzkáře, kteří pravidelně kontrolují technický stav tratě. 40 • Provoz V rekonstruované ŽELEZNIČNÍ stanicI BRNO hlavní nádraží Neustále rostoucí požadavky objednatelů dopravy na množství vlakových spojů a kvalitu jejich dopravního odbavení vyústily v nutnost zásadní investice ve stanici Brno hlavní nádraží. cílem bylo prodloužit životnost do doby výstavby zcela nového nádraží v odsunuté poloze. 56 • ČEŠI naučili sYsTÉM c-ITs varovat řIDIČE PřED BLÍŽÍcÍM sE ŽELEZNIČNÍM PřEJEZDEM Představte si systém v automobilu, který vás upozorní na blížící se přejezd a pokud je ve výstraze, bude vás varovat textovým hlášením a animovanými piktogramy. Tuto novou službu v rámci projektu c-ROADs cZ vytvořily společnosti RADOM a AŽD. ČTVRTLETNÍK REPORTÉR AŽD 1/2020 (vyšlo 30. 3. 2020 v Praze). VYDÁVÁ: AŽD Praha s.r.o., Žirovnická 3146/2, Záběhlice, 106 00 Praha 10, IČ: 48029483, tel.: 267 287 424 REDAKČNÍ RADA: Jiří Dlabaja, šéfredaktor, Ilona Hrečková, zástupkyně šéfredaktora. -
Station Sign 64” 2 14 Bennet
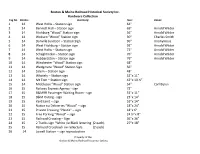
Boston & Maine Railroad Historical Society Inc. Hardware Collection Tag No. File No: Inventory: Size: Donor: 1 14 West Hollis – Station sign 64” 2 14 Bennett Hall – Station sign 69” Arnold Wilder 3 14 Fitchburg “Wood” Station sign 56” Arnold Wilder 4 14 Woburn “Wood” Station sign 30” Charles Smith 5 14 Danville Junction – Station Sign 96” Anonymous 6 14 West Fitchburg – Station sign 92” Arnold Wilder 7 14 West Hollis – Station sign 72” Arnold Wilder 8 14 Scheghticoke – Station sign 76” Arnold Wilder 9 14 Hubbardston – Station sign 76” Arnold Wilder 10 14 Winchester “Wood” Station sign 68” 11 14 Wedgmere “Wood” Station Sign 56” 12 14 Salem – Station sign 48” 13 14 Whately – Station sign 52”x 11” 14 14 Mt Tom – Station sign 42”x 10 ½” 15 14 Middlesex “Wood” Station sign 54” Carl Byron 16 15 Railway Express Agency - sign 72” 17 15 B&MRR Passenger Waiting Room - sign 32”x 11” 18 15 B&M Outing - sign 23”x 14” 19 15 Yard Limit – sign 16”x 14” 20 15 Notice no Deliveries “Wood” – sign 18”x 24” 21 15 Private Crossing “Plastic” – sign 18”x 6” 22 15 Free Parking “Wood” – sign 24 ½”x 8” 23 15 Railroad Crossing – Sign 36”x 36” 24 15 2 Tracks sign “White /w Black lettering (2 each) 27”x 18” 25 15 Railroad Crossbuck /w reflectors (2 each) 26 14 Lowell Station – sign reproduction Property of the Boston & Maine Railroad Historical Society Boston & Maine Railroad Historical Society Inc. Hardware Collection Tag No. File No: Inventory: Size: Donor: 27 15 Hand Held Stop – sign Donald S. -

Developing Standards for New Technology Signal Systems for Rail Transit Applications
Transactions on the Built Environment vol 34, © 1998 WIT Press, www.witpress.com, ISSN 1743-3509 Developing standards for new technology signal systems for rail transit applications A. F. Rumsey Parsons Transportation, New York, U.S.A. Abstract Radio communications-based train control (CBTC) systems, also referred to as transmission-based signalling (TBS) systems, permit more effective utilization of rail transit infrastructure by allowing trains to operate safety at much closer headways, by permitting greater flexibility and greater precision in train control, and by providing continuous safe train separation assurance and overspeed protection. One of the challenges facing transit agencies who are considering the introduction of CBTC systems, however, is the lack of industry standards for this emerging technology, and the current inability of trains equipped with CBTC equipment from one supplier to operate on track equipped with CBTC equipment from a second supplier. This paper reports on the status of two separate initiatives being taken in North America to develop standards for CBTC systems for rail transit applications; one based on a voluntary consensus development approach, and the second based on a competitive procurement approach. 1 Background Conventional signalling and train control systems rely almost exclusively on track circuits to detect the presence of trains. Information on the status of the track ahead is provided to train operators either through wayside signals or trainborne cab signals. Ensuring compliance with the signals is achieved either through strict observance of operating procedures, or through automatic train protection features such as wayside electro-mechanical train stops, or trainborne supervisory equipment linked to the train's braking system. -

Consulting and Feasibility Study for Establishing Railway Electronic Interlocking System for Egypt
Establishment of Algeria's2013 KSP National System VisionConsulting 2030 Chapter 12 2013 System Consulting: Cadastre, Transportation 1. Vision 2030 and Indicator Analysis 2. Algeria and the Global Economy 1. Consulting and Feasibility Study for Establishing Railway 3. Current Issues Facing Algeria’s Economy Electronic Interlocking System for Egypt 4.Vision Scenarios 2. Support for the Establishment of the Chile Cadastral 5. Conclusions Information Management System Establishment of Algeria's2013 KSP National System VisionConsulting 2030 Chapter 1 Consulting and Feasibility Study for Establishing Railway Electronic Interlocking System for Egypt 1. Vision 2030 and Indicator Analysis 2. Algeria and the Global Economy Hwang Gook-hwan, Director General, Korea Eximbank 3. Current Issues Facing Algeria’s Economy Young-Seok Kim, Director, Korea Eximbank 4.Vision Scenarios In-sik Bang, Loan Officer, Korea Eximbank 5. Conclusions Yea-seul Lim, Research officer, Korea Eximbank List of Abbreviations List of Abbreviations Abbreviation Full Description ABS Automatic Block System AC Alternative Current AF Audio Frequency ATC Automatic Train Control ATO Automatic Train Operation ATP Automatic Train Protection ATS Automatic Train Stop BTM Balise Transmission Module CAU Compact Antenna Unit CCTV Closed-circuit television COD Corrugated Optic Duct COMC Communication Operator CPU Central processing unit CTC Centralized Traffic Control DC Direct Current DLP Digtal Light Processing EDCF Economic Development Cooperation Fund EIS Electronic Interlocking System -

The Bulletin BERNARD LINDER, 1918-2017
ERA BULLETIN — FEBRUARY, 2018 The Bulletin Electric Railroaders’ Association, Incorporated Vol. 61, No. 2 February, 2018 The Bulletin BERNARD LINDER, 1918-2017 Published by the Electric by Alexander Ivanoff Railroaders’ Association, Incorporated, PO Box Longtime ERA Bulletin Editor-in-Chief Ber- Despite having worked for New York City 3323, New York, New nard Linder (ERA #2668) passed away on Transit and having been a railfan, Bernie did York 10163-3323. the evening of December 12, 2017 at the age not hear about ERA until a chance encounter of 99, after a brief illness. Born on March 31, with the late Martin Schachne (ERA #1137). For general inquiries, or 1918, Bernie grew up in in the Bronx and He became a member in 1961 and since Bulletin submissions, became interested in electric traction through 1963, Bernie had been involved in some ca- contact us at bulletin@ erausa.org. ERA’s his parents. His father pacity with what started website is was a newsstand ven- out as the New York Divi- www.erausa.org. dor in the subway and sion Bulletin (now simply he would go with his the Bulletin). He was Editorial Staff: mother to help out. asked by Arthur Lonto to Editor-in-Chief: Jeffrey Erlitz From an early age become the Bulletin Edi- Tri-State News and Bernie collected news tor in 1980, and since Commuter Rail Editor: stories on transit and then his name had been Ronald Yee traction events, as far on well over 400 monthly North American and World as collecting car ros- issues, and until his News Editor: Alexander Ivanoff ters at the age of 13. -

Railroad Signals & Related Equipment
Boston & Maine Railroad Historical Society Incorporated File No. 11 Signals & Related Equipment Hardware Collection Train Signal & Equipment • During the early years of railroading, methods had to be devised to ensure that two trains did not meet at the same time on the same section of track. • This was initially accomplished through the use of timetables and train orders. • Block Signal systems were developed, which indicated to the locomotive engineer whether or not a train was head in the next block of track. • These signals were set manually until the track circuit was developed, which sensed the presence of a train in the block and set the signals automatically. • The track circuit was designed to be fail-safe, so that the battery or any wire connections were to fail or if a rail was broken, a clear signal would be displayed. • Insulated joints were used to define the limits of the block. • Various types of track circuits are utilized in automatic traffic control device installations at highway-rail grade crossings. Morse Recording Register with Brass Key Circa 1890’s Conn River Line 38 ¼”x 7”x 5..5” Boston & Maine Railroad Historical Society - Railroad Telegraph Display Donation by; Donald F. Hodge Resonator Box w/ Sounder The Sounder is in a Candlestick base Resonator. The Resonator box is mounted on a metal candlestick phone style base. The Sounder is a Telegraph Instrument that allowed an operator to receive and interpret an incoming message by the Sounder. Donation by; Donald F. Hodge Railroad Telegraph Display High Voltage Station Relay Telegraph Keys Closed and Open Alphabet – Morse Code Wooden Pole w/ Glass Insulator Glass Insulators • Glass Insulators were first manufactured in quantity in the 1800’s when the first telegraph and telephone circuits were put in place. -

Lijst Van Verkortingen Spoorwegen 3E Druk P. Gutter
Lijst van Verkortingen Spoorwegen Peter Gutter September 2018 Sinds 2002 is deze spoorse verkortingenlijst als privé-project bijgehouden. De eerste versies van de lijst telden slechts enkele bladzijden en werden op informele wijze verspreid onder collega’s van onder meer ProRail, NS Reizigers, NedTrain, Strukton en Railion, die er dankbaar gebruik van maakten. Al gauw kreeg ik vele aanvullingen toegestuurd. De lijst groeide daardoor snel en dit is alweer de 20e bijgewerkte en herziene versie, die hierbij als 3e druk in (elektronische) boekvorm verschijnt. Boven de bladzijden heb ik echter wel de vermelding 20e versie laten staan, omdat er al zoveel exemplaren van vorige versies in omloop zijn. 1e druk, april 2012 2e uitgebreide en herziene druk, april 2015 3e uitgebreide en herziene druk, september 2018 CIP-GEGEVENS ISBN 978-90-818932-4-4 NUR 464 Uitgegeven via de website www.nvbs.com van de Postbus 1384, 3800 BJ Amersfoort © Peter Gutter 2018 Deze uitgave is met de meeste zorg samengesteld. Indien deze toch onjuistheden blijkt te bevatten, kunnen uitgever en auteur daarvoor geen aansprakelijkheid aanvaarden. Aan deze uitgave kunnen geen rechten worden ontleend. Overname van gegevens uit deze uitgave is toegestaan mits de bron wordt vermeld. Inleiding Het Nederlandse spoorbedrijf hangt letterlijk aan elkaar van de afkortingen (ofwel verkortingen, zoals ze bij het spoor genoemd worden). Dat stamt nog uit de tijd dat gegevens bij de spoorwegen telegrafisch werden overgeseind. De verkorting Asdm bijvoorbeeld, is nu eenmaal sneller over te seinen dan de volledige benaming Amsterdam Muiderpoort. Lange tijd werden de verkortingen door de NS bijgehouden in een officiële lijst, genaamd LV ofwel de Lijst van Verkortingen C 0405. -

Acronime Şi Abrevieri Uzuale Folosite De Organizaţii Feroviare Internaţionale
Acronime şi abrevieri uzuale folosite de organizaţii feroviare internaţionale A A/C - Automatic couple - Cupla automată AATC - Advanced Automated Train Control - Control automat avansat (timpuriu) al trenului ABCL - Automatic Barrier Level Crossing Locally Monitored by Train Crew - Trecere la nivel cu un drum local cu barieră automată monitorizată de partida de tren ABC - Automatic Ballast Cleaner - Ciuruitoare a prismei de balast ABX - Automatic Barrier Level Crossing - Trecere la nivel cu bariere automate AC - Alternating Current - Curent alternativ AC-TC - Alternative Current Track Circuit - Circuit de cale alimentat în curent alternativ ACD - Automatic Call Distribution - Distribuţie automată a apelului ACE - Air Cushion Equipment - Echipament pe pernă de aer ACS - (1) Automated Control System - Sistem automat de control; (2) Automatic clearance sensing - Detector automat de gabarit ACSC - Automatically Compensated Spatial-Rhombic Catenary - Catenară romboido-spaţială compensată automat ACT - Automatically Controlled Transportation - Sistem de transport controlat automat AD - Approval Date - Data aprobării ADP - Automated Data Processing - Procesare automată a datelor ADRR - Access Dispute Resolution Rules - Regulamentul privind soluţionarea litigiilor referitoare la acces AEC - Association Européenne des Cheminots - Asociaţia europeană a personalului feroviar AEDTF- Association Européenne pour le Développement du Transport Ferroviaire - Asociaţia europeană pentru dezvoltarea sistemului de transport feroviar AEIF - Association Européenne -
(CCS) and Migration to ERTMS
FEASIBILITY STUDY REFERENCE FEASIBILITY STUDY REFERENCE SYSTEM ERTMS FinalSYSTEM Report ERTMS DigitalisationFinal Report of CCS (Control Command and Signalling) and MigrationDigitalisation to ERTMS of CCS (Control Command and Signalling) and Migration to ERTMS European Railway Agency - 2017 23 OP European Railway Agency - 2017 23 OP 14 AUGUST 2018 14 AUGUST 2018 FEASIBILITY STUDY REFERENCE SYSTEM ERTMS Contact ANDRÉ VAN ES Arcadis Nederland B.V. P.O. Box 220 3800 AE Amersfoort The Netherlands Our reference: 083702890 A - Date: 2 November 2018 2 of 152 FEASIBILITY STUDY REFERENCE SYSTEM ERTMS CONTENTS 1 INTRODUCTION 9 1.1 EU Context of Feasibility Study 9 1.2 Digitalisation of the Rail Sector 9 1.3 Objectives of Feasibility Study 11 1.4 Focus of Feasibility Study 11 1.5 Report Structure 12 2 SCOPE AND METHODOLOGY 13 2.1 Methodology 13 2.2 Scope Addition 15 2.3 Wider Pallet of Interviewed Parties 15 2.4 Timeframes 19 3 INFRASTRUCTURE MANAGERS 20 3.1 Findings and Trends Infrastructure Managers 20 3.2 Reasons for Replacing Non-ETCS Components 28 3.3 Short-Term versus Long-Term 31 4 OPERATING COMPANIES 33 4.1 Dutch Railways (NS) 33 4.2 DB Cargo 35 4.3 RailGood 36 4.4 European Rail Freight Association 37 4.5 Findings and Trends Operating Companies 38 5 RAIL INDUSTRY SUPPLIERS 40 5.1 Supplier 1 40 5.2 Supplier 2 41 5.3 Supplier 3 42 5.4 Supplier 4 42 5.5 Supplier 5 42 Our reference: 083702890 A - Date: 2 November 2018 3 of 152 FEASIBILITY STUDY REFERENCE SYSTEM ERTMS 5.6 Findings and Trends Suppliers 43 6 RAILWAY INDUSTRY DEVELOPMENT INITIATIVES -

Comparison of Solid State and Relay Devices and Techniques
-----~- --- --- ( P8277·947 II 11111 111111111111111"" 11111111111 REPORT NO. FRA/ORD-77/45.11 POTENTIAL MEANS OF COST REDUCTION INGRADE CROSSI NG MOTORI ST-WARNI NG CONTROL EQU I PMENT Volume II: Comparison of Solid State and Relay Devices and Techniques F. Ross Holmstrom University of Lowell Research Foundation 450 Aiken Street Lowell MA 01854 . .~ . DECEMBER 1977 FINAL REPORT DOCUMENT IS AVAIL.ABL.E TO THE U.S. PUBL.IC THROUGH THE NATIONAL. TECHNICAL. INFORMATION SERVICE, SPRINGFIEL.D, VI RGINIA 22161 REPRODUCED BY NATIONAL TECHNICAL , INFORMATION SERVICE Ius DEPARTMENT OF COMMERCE I .. ., SPRINGFIELD. VA. ZZlGI Prepared for U.S. DEPARTMENT OF TRANSPORTATION FEDERAL RAILROAD ADMINISTRATION Office of Research and Development Washington DC 20590 ,. NOTICE This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Govern ment assumes no liability for its contents or use thereof. NOT I-e E The United States Government does not endorse pro ducts or m~nufacturers. Trade or manufacturers' names appear herein solely because they are con sidered essential to the object of this report. Technical Report Documentation Page 1. Repo,t No. 2. Government Accession No_ RpP;9s~a~r7 3. 947 FRA/ORD-77/45.II 4. Title and Subtitle 5. Report Dale POTENTIAL MEANS OF COST REDUCTION IN GRADE December 1977 CROSSING MOTORIST-WARNING CONTROL EQUIPMENT 6. Performing O'gonIIQ,.on Code Volume II: Comparison of Solid State and Relay Devices and Techniaues 8. Performing Orgonlzollo,' Report No. 7. Autf or' sJ I I F. Ross Holmstrom DOT-TSC-FRA-76-2l,II I I 9. -

General Corporation Tax (GCT)
CITY OF NEW YORK DEPARTMENT OF FINANCE 1998 - STOCK ALLOCATION BELOW 100 PERCENT REPORT NAME ISSUERS ALLOCATION PERCENT NAME ISSUERS ALLOCATION PERCENT #78 GIAC LEASING CORPORATION 1.33 A F FIRE PROTECTION CO INC 13.54 "K" LINE AIR SERVICE (U.S.A.) 23.80 A F LEWIS & CO OF NEW YORK 23.20 A B DISTRIBUTORS INC 92.94 A F SUPPLY CORP 82.38 A L SHET METAL FABRICATIONS 69.80 A FEIBUSCH CORP 83.30 A & B AGENCY 25.00 A FINE GAUGE INC 59.27 A & C MECHANICAL INC LONG IS 0.44 A FOSTER HIGGINS INC 16.05 A & D ENTERPRISES, INC 75.45 A G EDWARDS SONS INC 1.45 A & D MECHANICAL INC 65.57 A G H TRIMSOURCE INC 76.57 A & E BUSINESS ADVISORS INC 67.80 A G INTERNATIONAL INC 17.20 A & E DENTAL STUDIO INC 89.20 A G INTERTAINMENT 7.67 A & E MANAGEMENT SYST 2.00 A H ENGINEERS PC 97.22 A & F INSTALLATIONS INC 10.19 A H HARRIS SONS INC 0.17 A & J FIXTURES INC 10.20 A H SCHREIBER CO INC 24.04 A & J FIXTURES, INC. 5.81 A H SPORTSWEAR CO INC 69.19 A & J HEATING & AIR CONDITIONISERVICE 62.50 A H VIDEO SALES REPRESENTIVE 59.56 A & M BILLING CONSULTANTS INC 17.30 A HARTRODT VIA INC 63.60 A & M BRONX BAKING INC 24.95 A HELLER METALS CO INC 90.88 A & N DELIVERY SERVICE, INC. 10.09 A I & ASSOCIATES INC 5.08 A & R DEVELOPMENT INC 45.42 A I PROFESSIONAL CLEANING 88.00 A & R RECYCLING INC. -
Interference of Electrification with Signaling and Communication Systems
47 Omaha; and Union Switch and Signal Division of Westing- for Railroad Electrification. Arthur D. Little, Inc., house Air Brake Company, Swissvale, Pennsylvania. In Cambridge, Mass., and Transportation Systems addition, further refinement of this data was done under Center, U.S. Department of Transportation, 1976. the sponsorship of the United States Railway Association H. C. Kendall. Railroad Electrification: A Status and the Transportation Systems Center of the U.S. De- Report. General Railway Signal Co., Rochester, partment of Transportation. N.Y., 1975. M. P. Boissonade. L'Electrification Braut— REFERENCES Gravenchon avec Lignes de Contact 25-ky Simplifies. Revue Gnrale des Chemins de Fer (Paris), Dec. 1 E. G. Schwarm. Factors Affecting Railroad Elec- 1969. trification as Applied to Conrail. Arthur D. Little, E. G. Schwarm. Energy Costs for Railroad Elec- Inc., Cambridge, Mass., and United States Railway trification. Arthur D. Little, Inc., Cambridge, Mass., Association, 1975. and Transportation Systems Center, U.S. Department 2. E. G. Schwarm. Engineering Cost Data Analysis of Transportation, 1977. Interference of Electrification With Signaling and Communication Systems Hugh C. Kendall, General Railway Signal Company, Rochester, New York Signal and communication systems are an integral part compatible with electrification represent a substantial of railroad operations and are essential to provide safe expense that has very little economic justification in and expeditious train movements. The major functions terms of increased safety or ease of railroad operations. performed by these systems are In reality, it is an expense that a railroad must make solely because of electrification. The signal engineer To maintain safe separation between trains and is therefore in a difficult situation and is sometimes to detect unsafe conditions in the track ahead of a train, considered a roadblock to electrification.