Xerox University Microfilms
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Physical Study by Surface Characteriza4ons of Sarin Sensor on the Basis of Chem
Physical Study by Surface Characterizaons of Sarin Sensor on the Basis of Chemically Func4onalized Silicon Nanoribbon Field Effect Transistor K. Smaali1,§, D. Guérin1, V. Passi1, L. Ordronneau2, A. Carella2, T. Mélin1, E. Dubois1, D. Vuillaume1, J.P. Simonato2 and S. Lenfant1,* 1 IEMN, CNRS, Avenue Poincaré, Villeneuve d'Ascq, F-59652 cedex, France. 2. CEA, LITEN/DTNM/SEN/LSIN, Univ. Grenoble Alpes, MINATEC Campus, F-38054 Grenoble, France. ABSTRACT : Surface characteriZa[ons of an organophosphorus (OP) gas detector based on chemically func[onaliZed silicon nanoribbon field-effect transistor (SiNR-FET) were performed by Kelvin Probe Force Microscopy (KPFM) and ToF-SIMS, and correlated with changes in the current-voltage characteris[cs of the devices. KPFM measurements on FETs allow (i) to inves[gate the contact poten[al difference (CPD) distribu[on of the polariZed device as func[on of the gate voltage and the exposure to OP traces and; (ii) to analyZe the CPD hysteresis associated to the presence of mobile ions on the surface. The CPD measured by KPFM on the silicon nanoribbon was corrected due to side capacitance effects in order to determine the real quan[ta[ve surface poten[al. Comparison with macroscopic Kelvin probe (KP) experiments on larger surfaces was carried out. These two approaches were quan[ta[vely consistent. An important increase of the CPD values (between + 399 mV and + 302 mV) was observed aeer the OP sensor graeing, corresponding to a decrease of the work func[on, and a weaker varia[on aeer exposure to OP (between - 14 mV and - 61 mV) was measured. -

Nerve Agent - Lntellipedia Page 1 Of9 Doc ID : 6637155 (U) Nerve Agent
This document is made available through the declassification efforts and research of John Greenewald, Jr., creator of: The Black Vault The Black Vault is the largest online Freedom of Information Act (FOIA) document clearinghouse in the world. The research efforts here are responsible for the declassification of MILLIONS of pages released by the U.S. Government & Military. Discover the Truth at: http://www.theblackvault.com Nerve Agent - lntellipedia Page 1 of9 Doc ID : 6637155 (U) Nerve Agent UNCLASSIFIED From lntellipedia Nerve Agents (also known as nerve gases, though these chemicals are liquid at room temperature) are a class of phosphorus-containing organic chemicals (organophosphates) that disrupt the mechanism by which nerves transfer messages to organs. The disruption is caused by blocking acetylcholinesterase, an enzyme that normally relaxes the activity of acetylcholine, a neurotransmitter. ...--------- --- -·---- - --- -·-- --- --- Contents • 1 Overview • 2 Biological Effects • 2.1 Mechanism of Action • 2.2 Antidotes • 3 Classes • 3.1 G-Series • 3.2 V-Series • 3.3 Novichok Agents • 3.4 Insecticides • 4 History • 4.1 The Discovery ofNerve Agents • 4.2 The Nazi Mass Production ofTabun • 4.3 Nerve Agents in Nazi Germany • 4.4 The Secret Gets Out • 4.5 Since World War II • 4.6 Ocean Disposal of Chemical Weapons • 5 Popular Culture • 6 References and External Links --------------- ----·-- - Overview As chemical weapons, they are classified as weapons of mass destruction by the United Nations according to UN Resolution 687, and their production and stockpiling was outlawed by the Chemical Weapons Convention of 1993; the Chemical Weapons Convention officially took effect on April 291997. Poisoning by a nerve agent leads to contraction of pupils, profuse salivation, convulsions, involuntary urination and defecation, and eventual death by asphyxiation as control is lost over respiratory muscles. -
Warning: the Following Lecture Contains Graphic Images
What the новичок (Novichok)? Why Chemical Warfare Agents Are More Relevant Than Ever Matt Sztajnkrycer, MD PHD Professor of Emergency Medicine, Mayo Clinic Medical Toxicologist, Minnesota Poison Control System Medical Director, RFD Chemical Assessment Team @NoobieMatt #ITLS2018 Disclosures In accordance with the Accreditation Council for Continuing Medical Education (ACCME) Standards, the American Nurses Credentialing Center’s Commission (ANCC) and the Commission on Accreditation for Pre-Hospital Continuing Education (CAPCE), states presenters must disclose the existence of significant financial interests in or relationships with manufacturers or commercial products that may have a direct interest in the subject matter of the presentation, and relationships with the commercial supporter of this CME activity. The presenter does not consider that it will influence their presentation. Dr. Sztajnkrycer does not have a significant financial relationship to report. Dr. Sztajnkrycer is on the Editorial Board of International Trauma Life Support. Specific CW Agents Classes of Chemical Agents: The Big 5 The “A” List Pulmonary Agents Phosgene Oxime, Chlorine Vesicants Mustard, Phosgene Blood Agents CN Nerve Agents G, V, Novel, T Incapacitating Agents Thinking Outside the Box - An Abbreviated List Ammonia Fluorine Chlorine Acrylonitrile Hydrogen Sulfide Phosphine Methyl Isocyanate Dibotane Hydrogen Selenide Allyl Alcohol Sulfur Dioxide TDI Acrolein Nitric Acid Arsine Hydrazine Compound 1080/1081 Nitrogen Dioxide Tetramine (TETS) Ethylene Oxide Chlorine Leaks Phosphine Chlorine Common Toxic Industrial Chemical (“TIC”). Why use it in war/terror? Chlorine Density of 3.21 g/L. Heavier than air (1.28 g/L) sinks. Concentrates in low-lying areas. Like basements and underground bunkers. Reacts with water: Hypochlorous acid (HClO) Hydrochloric acid (HCl). -

Chemical Warfare Nerve Agents the V Series Nerve Agents Are Highly Toxic Chemical Warfare Agents
CHEMICAL WARFARE NERVE AGENTS THE V SERIES NERVE AGENTS ARE HIGHLY TOXIC CHEMICAL WARFARE AGENTS. THE ‘V’ STANDS FOR ‘VENOMOUS’. THEY WERE DISCOVERED IN THE PART TWO: THE V SERIES UK IN THE 1950s, AND LATER VX WAS DEVELOPED FOR MILITARY USE BY THE UNITED STATES, THOUGH IT HAS NEVER BEEN USED IN WARFARE. O O O O N P N P O S N P O S N P O S O S O VX VE VG VM (O-Ethyl-S-[2(diisopropylamino)ethyl] methylphosphonothioate) O-Ethyl-S-[2-(diethylamino)ethyl] ethylphosphonothioate O,O-Diethyl-S-[2-(diethylamino)ethyl] phosphorothioate O-Ethyl-S-[2-(diethylamino)ethyl] methylphosphonothioate (the compound known as ‘Russian VX’ is an isomer of this compound) SMELL & APPEARANCE DISCOVERY USAGE & FATALITIES LETHALITY FIGURES FOR VX Pure VX is a colourless liquid, but more As the V series agents exist primarily as low commonly it is an amber-coloured, – volatility liquids, they are designed for use median lethal concentration median lethal dose VX oily, odourless liquid. 1952 1955 as area-denial agents. UNITED KINGDOM The only recorded human fatality as a result 15 10 The other V series nerve agents are milligram-minutes per milligrams per person The V series nerve agents were discovered during of VX is in Japan in 1994, when a sect used it cubic metre (skin exposure) thought to be odourless, colourless work to synthesise pesticides and insecticides. to assassinate a former member. It may have VE liquids at room temperature (when also been used in Iraq by Saddam Hussein, Due to the scarcity of research on the V series VG was originally sold as a insecticide, under pure). -
Detect and Identify Novichoks
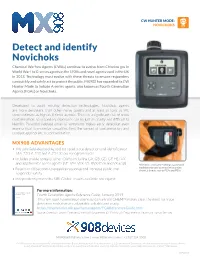
CW HUNTER MODE: NOVICHOKS Detect and identify Novichoks Chemical Warfare Agents (CWAs) continue to evolve from Chlorine gas in World War I to G-series agents in the 1930s and novel agents used in the UK in 2018. Technology must evolve with these threats to ensure responders can quickly and safely act to protect the public. MX908 has expanded its CW Hunter Mode to include A-series agents, also known as Fourth Generation Agents (FGAs) or Novichoks. Developed to avoid existing detection technologies, Novichok agents are more persistent than other nerve agents and at least as toxic as VX; some estimate as high as 8 times as toxic. There is a significant risk of cross contamination, so secondary exposures can be just as deadly and difficult to identify. Potential delayed onset of symptoms makes early detection even more critical to minimize casualties, limit the spread of contamination, and conduct appropriate decontamination. MX908 ADVANTAGES • The only field-deployable tool for rapid trace detection and identification of A-230, A-232 and A-234 at low nanogram levels • Includes a wide range of other CWAs including GA, GB, GD, GF, HD, VX and additional V-series agents (VE, VM, VLX, VS, RVX/CVX and VX acid) MX908 is continually evolving to go beyond traditional threats by adressing emerging • Results in 60 seconds to expedite response and increase public and chemical threats such as FGAs and PBAs. responder safety • Independently tested by MRI Global; results available on request For more information: FOURTH GENERATION AGENTS: REFERENCE GUIDE Fourth Generation Agents: Reference Guide, January 2019 January 2019 This new fourth generation agent guidance from CHEMM makes clear the need for trace detection tools that are adaptable, reliable and ready. -

Nerve Agents (Ga, Gb, Gd, Vx) Tabun (Ga) Cas # 77-81-6 Sarin (Gb) Cas # 107-44-8 Soman (Gd) Cas # 96-64-0 Vx Cas # 50782-69-9
NERVE AGENTS (GA, GB, GD, VX) TABUN (GA) CAS # 77-81-6 SARIN (GB) CAS # 107-44-8 SOMAN (GD) CAS # 96-64-0 VX CAS # 50782-69-9 Division of Toxicology ToxFAQsTM April 2002 This fact sheet answers the most frequently asked health questions (FAQs) about nerve agents. For more information, call the ATSDR Information Center at 1-888-422-8737. This fact sheet is one in a series of summaries about hazardous substances and their health effects. It is important you understand this information because this substance may harm you. The effects of exposure to any hazardous substance depend on the dose, the duration, how you are exposed, personal traits and habits, and whether other chemicals are present. HIGHLIGHTS: Exposure to nerve agents can occur due to accidental release from a military storage facility. Nerve agents are highly toxic regardless of the route of exposure. Exposure to nerve agents can cause tightness of the chest, excessive salivation, abdominal cramps, diarrhea, blurred vision, tremors, and death. Nerve agents (GA, GB, GD, VX) have been identified at 5 of the 1,585 National Priorities List sites identified by the Environmental Protection Agency (EPA). What are nerve agents GA, GB, GD, and VX? ‘ GA, GB, GD, and VX will be broken down in water quickly, but small amounts may evaporate. Nerve agents GA(tabun), GB (sarin), GD(soman), and VX are ‘ GA, GB, GD, and VX will be broken down in moist soil manufactured compounds. The G-type agents are clear, quickly. Small amounts may evaporate into air or travel colorless, tasteless liquids miscible in water and most below the soil surface and contaminate groundwater. -

Catalytic Efficiencies of Directly Evolved Phosphotriesterase Variants with Structurally Different Organophosphorus Compounds in Vitro
Arch Toxicol DOI 10.1007/s00204-015-1626-2 MOLECULAR TOXICOLOGY Catalytic efficiencies of directly evolved phosphotriesterase variants with structurally different organophosphorus compounds in vitro Moshe Goldsmith2 · Simone Eckstein1 · Yacov Ashani2 · Per Greisen Jr.3 · Haim Leader4 · Joel L. Sussman5 · Nidhi Aggarwal5 · Sergey Ovchinnikov3 · Dan S. Tawfik2 · David Baker3 · Horst Thiermann1 · Franz Worek1 Received: 27 July 2015 / Accepted: 22 October 2015 © Springer-Verlag Berlin Heidelberg 2015 Abstract The nearly 200,000 fatalities following expo- catalytic efficiencies of V-agent hydrolysis by two newly sure to organophosphorus (OP) pesticides each year and selected PTE variants were determined. Moreover, in order the omnipresent danger of a terroristic attack with OP to establish trends in sequence–activity relationships along nerve agents emphasize the demand for the development of the pathway of PTE’s laboratory evolution, we examined effective OP antidotes. Standard treatments for intoxicated kcat/KM values of several variants with a number of V-type patients with a combination of atropine and an oxime are and G-type nerve agents as well as with different OP pes- limited in their efficacy. Thus, research focuses on develop- ticides. Although none of the new PTE variants exhibited 7 1 1 ing catalytic bioscavengers as an alternative approach using kcat/KM values >10 M− min− with V-type nerve agents, OP-hydrolyzing enzymes such as Brevundimonas diminuta which is required for effective prophylaxis, they were phosphotriesterase (PTE). Recently, a PTE mutant dubbed improved with VR relative to previously evolved variants. C23 was engineered, exhibiting reversed stereoselectivity The new variants detoxify a broad spectrum of OPs and and high catalytic efficiency (kcat/KM) for the hydrolysis of provide insight into OP hydrolysis and sequence–activity the toxic enantiomers of VX, CVX, and VR. -
The Nerve Agent
SuggFeatureMarch2004.qxd 2/12/04 9:31 AM Page 32 SecuritySecurity The VX Nerve Agent Understanding the risks of a deadly threat By Geary Randall Sugg TERRORISM AFFECTS EVERYONE, everywhere, cameras were mounted inside and outside the mall every day. It is fast becoming part of the SH&E pro- area. The FBI reviewed the footage after the incident Tfessional’s job to recognize the vulnerability risk fac- to develop a more thorough sequence of events. tors associated with it. Many HazMat training Following is a summary of those events. programs and seminars now cover weapons of mass A man of medium height and build, with short destruction (WMD). Although there are four basic black hair and a mustache, walked up to a tall trash types of WMD—chemical, ordnance, biological and receptacle and dropped a large brown paper sack radiological (COBRA) [DOJ(a)]—this article primari- into it. A busboy noticed that part of the sack was ly focuses on one deadly chemical threat commonly hanging out of the dispenser. He removed the sack known as the VX nerve agent. Although all nerve and set it on top of the trash receptacle so he could agents are deadly, the VX nerve agent is the “bad- properly install a fresh plastic liner. Moments later, a dest of the bad.” In the wrong hands and with the sharp popping sound was heard followed by a hiss- right devices, it could possibly be disseminated to ing noise (like that of an aerosol can). An elderly murder millions. man eating at a table less than 10 feet away from the The case study presented is hypothetical and sim- trash can immediately started choking and fell out of ilar to many training scenarios studied by first his chair to the floor. -
Q-Ve-Oph, a Control Caspase Inhibitor for Analyzing Neuronal Death
Wright State University CORE Scholar Browse all Theses and Dissertations Theses and Dissertations 2012 Q-ve-oph, A Control Caspase Inhibitor for Analyzing Neuronal Death Rebecca L. Bricker Wright State University Follow this and additional works at: https://corescholar.libraries.wright.edu/etd_all Part of the Immunology and Infectious Disease Commons, and the Microbiology Commons Repository Citation Bricker, Rebecca L., "Q-ve-oph, A Control Caspase Inhibitor for Analyzing Neuronal Death" (2012). Browse all Theses and Dissertations. 570. https://corescholar.libraries.wright.edu/etd_all/570 This Thesis is brought to you for free and open access by the Theses and Dissertations at CORE Scholar. It has been accepted for inclusion in Browse all Theses and Dissertations by an authorized administrator of CORE Scholar. For more information, please contact [email protected]. Q-VE-OPh, a control caspase inhibitor for analyzing neuronal death A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science By REBECCA LYNN BRICKER B.S., Wright State University, 2010 2012 Wright State University WRIGHT STATE UNIVERSITY GRADUATE SCHOOL June 4, 2012 I HEREBY RECOMMEND THAT THE THESIS PREPARED UNDER MY SUPERVISION BY Rebecca Lynn Bricker ENTITLED Q-VE-OPH, A CONTROL CASPASE INHIBITOR FOR ANALYZING NEURONAL DEATH BE ACCEPTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Science Thomas L. Brown, Ph.D. Thesis Director Barbara Hull, Ph.D. Program Director Committee on Final Examination Thomas L. Brown, Ph.D. David Cool, Ph.D. Courtney Sulentic, Ph.D. Andrew Hsu, Ph.D. Dean, Graduate School ABSTRACT Bricker, Rebecca Lynn. -
Chemical Targets to Deactivate Biological and Chemical Toxins Using Surfaces and Fabrics
REVIEWS Chemical targets to deactivate biological and chemical toxins using surfaces and fabrics Christia R. Jabbour, Luke A. Parker , Eline M. Hutter and Bert M. Weckhuysen ✉ Abstract | The most recent global health and economic crisis caused by the SARS-CoV-2 outbreak has shown us that it is vital to be prepared for the next global threat, be it caused by pollutants, chemical toxins or biohazards. Therefore, we need to develop environments in which infectious diseases and dangerous chemicals cannot be spread or misused so easily. Especially, those who put themselves in situations of most exposure — doctors, nurses and those protecting and caring for the safety of others — should be adequately protected. In this Review, we explore how the development of coatings for surfaces and functionalized fabrics can help to accelerate the inactivation of biological and chemical toxins. We start by looking at recent advancements in the use of metal and metal- oxide- based catalysts for the inactivation of pathogenic threats, with a focus on identifying specific chemical bonds that can be targeted. We then discuss the use of metal–organic frameworks on textiles for the capture and degradation of various chemical warfare agents and their simulants, their long-term efficacy and the challenges they face. Pathogens Throughout our daily lives, our health is exposed to handle and destroy CWAs. The Chemical Weapons Foreign agents, such as many invisible risks, most of the time unknowingly. Convention aims to restrict the misuse of warfare agents bacteria or viruses, that These risks can be human- made or natural, present by banning the production and stockpiles of chemical cause disease. -

Scientific Advisory Board
OPCW Scientific Advisory Board Twenty-Second Session SAB-22/WP.2/Rev.1 8 – 12 June 2015 10 June 2015 ENGLISH only RESPONSE TO THE DIRECTOR-GENERAL'S REQUEST TO THE SCIENTIFIC ADVISORY BOARD TO PROVIDE FURTHER ADVICE ON ASSISTANCE AND PROTECTION EXECUTIVE SUMMARY 1. This note contains the SAB's Response to the Director-General's Request to the Scientific Advisory Board to Provide Further Advice on Asistance and Protection (Paragraph 9.20 of SAB-21/1, dated 27 June 2014). 2. This report was drafted as a follow up to the Director-General's previous request for advice from the SAB. Readers are advised to refer to the previous report (SAB-21/WP.7, dated 29 April 2014) when considering the information presented herein. 3. This report contains recommendations addressed to the Technical Secretariat of the OPCW. It is made available to the public for informational purposes, but is not meant to be used by the public. All decisions regarding patient care must be made with a healthcare provider and consider the unique characteristics of each patient. The information contained in this publication is accurate to the best of the OPCW's knowledge; however, neither the OPCW nor the independent experts of the Scientific Advisiory Board assume liability under any circumstances for the correctness or comprehensiveness of such informaion or for the consequences of its use. Annex: Response to the Director-General’s Request to the Scientifc Advisory Board to Provide Further Advice on Assistance and Protection CS-2015-9252(E) distributed 12/06/2015 *CS-2015-9252.E* SAB-22/WP.2/Rev.1 Annex page 2 Annex RESPONSE TO THE DIRECTOR-GENERAL’S REQUEST TO THE SCIENTIFC ADVISORY BOARD TO PROVIDE FURTHER ADVICE ON ASSISTANCE AND PROTECTION 1. -

Phosgene Oxime
Phosgene oxime From Wikipedia, the free encyclopedia Jump to navigation Jump to search Phosgene oxime Names IUPAC name N-(dichloromethylidene)hydroxylamine Other names dichloroformaldoxime, dichloroformoxime, hydroxycarbonimidic dichloride, CX Identifiers Y CAS Number • 1794-86-1 • Interactive image 3D model (JSmol) ChemSpider • 59024 Y • 65582 PubChem CID UNII • G45S3149SQ Y • DTXSID9075292 CompTox Dashboard (EPA) show InChI • InChI=1S/CHCl2NO/c2-1(3)4-5/h5H Y Key: JIRJHEXNDQBKRZ-UHFFFAOYSA-N Y • InChI=1/CHCl2NO/c2-1(3)4-5/h5H Key: JIRJHEXNDQBKRZ-UHFFFAOYAP show SMILES • Cl/C(Cl)=N\O Properties CHCl NO Chemical formula 2 Molar mass 113.93 g·mol−1 Appearance colorless crystalline solid or yellowish-brown liquid[1] Melting point 35 to 40 °C (95 to 104 °F; 308 to 313 K)[1] Boiling point 128 °C (262 °F; 401 K)[1] 70%[1] Solubility in water Hazards Main hazards highly toxic Except where otherwise noted, data are given for materials in their standard state (at 25 °C [77 °F], 100 kPa). N verify (what is Y N ?) Infobox references Chemical compound Phosgene oxime, or CX, is an organic compound with the formula Cl2CNOH. It is a potent chemical weapon, specifically a nettle agent. The compound itself is a colorless solid, but impure samples are often yellowish liquids. It has a strong, disagreeable odor and a violently irritating vapor. Contents • 1 Preparation and reactions • 2 Safety • 2.1 Decontamination, treatment, and handling properties • 3 References • 4 External links Preparation and reactions[edit] Phosgene oxime can be prepared by reduction of chloropicrin using a combination of tin metal and hydrochloric acid as the source of the active hydrogen reducing acent: Cl3CNO2 + 4 [H] → Cl2C=N−OH + HCl + H2O The observation of a transient violet color in the reaction suggests intermediate formation of trichloronitrosomethane (Cl3CNO).