The NVAX and NVAX+ High-Performance VAX Microprocessors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Data Storage the CPU-Memory
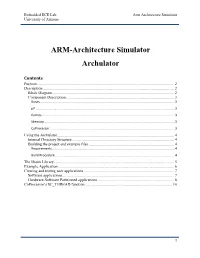
Data Storage •Disks • Hard disk (HDD) • Solid state drive (SSD) •Random Access Memory • Dynamic RAM (DRAM) • Static RAM (SRAM) •Registers • %rax, %rbx, ... Sean Barker 1 The CPU-Memory Gap 100,000,000.0 10,000,000.0 Disk 1,000,000.0 100,000.0 SSD Disk seek time 10,000.0 SSD access time 1,000.0 DRAM access time Time (ns) Time 100.0 DRAM SRAM access time CPU cycle time 10.0 Effective CPU cycle time 1.0 0.1 CPU 0.0 1985 1990 1995 2000 2003 2005 2010 2015 Year Sean Barker 2 Caching Smaller, faster, more expensive Cache 8 4 9 10 14 3 memory caches a subset of the blocks Data is copied in block-sized 10 4 transfer units Larger, slower, cheaper memory Memory 0 1 2 3 viewed as par@@oned into “blocks” 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 3 Cache Hit Request: 14 Cache 8 9 14 3 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 4 Cache Miss Request: 12 Cache 8 12 9 14 3 12 Request: 12 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 5 Locality ¢ Temporal locality: ¢ Spa0al locality: Sean Barker 6 Locality Example (1) sum = 0; for (i = 0; i < n; i++) sum += a[i]; return sum; Sean Barker 7 Locality Example (2) int sum_array_rows(int a[M][N]) { int i, j, sum = 0; for (i = 0; i < M; i++) for (j = 0; j < N; j++) sum += a[i][j]; return sum; } Sean Barker 8 Locality Example (3) int sum_array_cols(int a[M][N]) { int i, j, sum = 0; for (j = 0; j < N; j++) for (i = 0; i < M; i++) sum += a[i][j]; return sum; } Sean Barker 9 The Memory Hierarchy The Memory Hierarchy Smaller On 1 cycle to access CPU Chip Registers Faster Storage Costlier instrs can L1, L2 per byte directly Cache(s) ~10’s of cycles to access access (SRAM) Main memory ~100 cycles to access (DRAM) Larger Slower Flash SSD / Local network ~100 M cycles to access Cheaper Local secondary storage (disk) per byte slower Remote secondary storage than local (tapes, Web servers / Internet) disk to access Sean Barker 10. -

Mi!!Lxlosalamos SCIENTIFIC LABORATORY
LA=8902-MS C3b ClC-l 4 REPORT COLLECTION REPRODUCTION COPY VAXNMS Benchmarking 1-’ > .— u) 9 g .— mi!!lxLOS ALAMOS SCIENTIFIC LABORATORY Post Office Box 1663 Los Alamos. New Mexico 87545 — wAifiimative Action/Equal Opportunity Employer b . l)lS(”L,\l\ll K “Thisreport wm prcpmd J, an xcttunt ,,1”wurk ,pmwrd by an dgmcy d the tlnitwl SIdtcs (kvcm. mm:. Ncit her t hc llniml SIJIL.. ( Lwcrnmcm nor any .gcncy tlhmd. nor my 08”Ihcif cmployccs. makci my wur,nly. mprcss w mphd. or JwImL.s m> lcg.d Iululity ur rcspmuhdily ltw Ilw w.cur- acy. .vmplctcncs. w uscftthtc>. ttt”any ml’ormdt ml. dpprdl us. prudu.i. w proccw didowd. or rep. resent%Ihd IIS us wuukl not mfrm$e priwtcly mvnd rqdtts. Itcl”crmcti herein 10 my sp.xi!l tom. mrcial ptotlucr. prtxcm. or S.rvskc hy tdc mmw. Irdcnmrl.. nmu(a.lurm. or dwrwi~.. does nut mmwsuily mnstitutc or reply its mdursmwnt. rccummcnddton. or favorin: by the llniwd States (“mvcmment ormy qxncy thctcd. rhc V!C$VSmd opinmm d .mthor% qmxd herein do nut net’. UMrily r;~lt or died lhow. ol”the llnttcd SIJIL.S( ;ovwnnwnt or my ugcncy lhure of. UNITED STATES .. DEPARTMENT OF ENERGY CONTRACT W-7405 -ENG. 36 . ... LA-8902-MS UC-32 Issued: July 1981 G- . VAX/VMS Benchmarking Larry Creel —. I . .._- -- ----- ,. .- .-. .: .- ,.. .. ., ..,..: , .. .., . ... ..... - .-, ..:. .. *._–: - . VAX/VMS BENCHMARKING by Larry Creel ABSTRACT Primary emphasis in this report is on the perform- ance of three Digital Equipment Corporation VAX-11/780 computers at the Los Alamos National Laboratory. Programs used in the study are part of the Laboratory’s set of benchmark programs. -

Cache-Aware Roofline Model: Upgrading the Loft
1 Cache-aware Roofline model: Upgrading the loft Aleksandar Ilic, Frederico Pratas, and Leonel Sousa INESC-ID/IST, Technical University of Lisbon, Portugal ilic,fcpp,las @inesc-id.pt f g Abstract—The Roofline model graphically represents the attainable upper bound performance of a computer architecture. This paper analyzes the original Roofline model and proposes a novel approach to provide a more insightful performance modeling of modern architectures by introducing cache-awareness, thus significantly improving the guidelines for application optimization. The proposed model was experimentally verified for different architectures by taking advantage of built-in hardware counters with a curve fitness above 90%. Index Terms—Multicore computer architectures, Performance modeling, Application optimization F 1 INTRODUCTION in Tab. 1. The horizontal part of the Roofline model cor- Driven by the increasing complexity of modern applica- responds to the compute bound region where the Fp can tions, microprocessors provide a huge diversity of compu- be achieved. The slanted part of the model represents the tational characteristics and capabilities. While this diversity memory bound region where the performance is limited is important to fulfill the existing computational needs, it by BD. The ridge point, where the two lines meet, marks imposes challenges to fully exploit architectures’ potential. the minimum I required to achieve Fp. In general, the A model that provides insights into the system performance original Roofline modeling concept [10] ties the Fp and the capabilities is a valuable tool to assist in the development theoretical bandwidth of a single memory level, with the I and optimization of applications and future architectures. -
ARM-Architecture Simulator Archulator
Embedded ECE Lab Arm Architecture Simulator University of Arizona ARM-Architecture Simulator Archulator Contents Purpose ............................................................................................................................................ 2 Description ...................................................................................................................................... 2 Block Diagram ............................................................................................................................ 2 Component Description .............................................................................................................. 3 Buses ..................................................................................................................................................... 3 µP .......................................................................................................................................................... 3 Caches ................................................................................................................................................... 3 Memory ................................................................................................................................................. 3 CoProcessor .......................................................................................................................................... 3 Using the Archulator ...................................................................................................................... -

Multi-Tier Caching Technology™
Multi-Tier Caching Technology™ Technology Paper Authored by: How Layering an Application’s Cache Improves Performance Modern data storage needs go far beyond just computing. From creative professional environments to desktop systems, Seagate provides solutions for almost any application that requires large volumes of storage. As a leader in NAND, hybrid, SMR and conventional magnetic recording technologies, Seagate® applies different levels of caching and media optimization to benefit performance and capacity. Multi-Tier Caching (MTC) Technology brings the highest performance and areal density to a multitude of applications. Each Seagate product is uniquely tailored to meet the performance requirements of a specific use case with the right memory, NAND, and media type and size. This paper explains how MTC Technology works to optimize hard drive performance. MTC Technology: Key Advantages Capacity requirements can vary greatly from business to business. While the fastest performance can be achieved using Dynamic Random Access Memory (DRAM) cache, the data in the DRAM is not persistent through power cycles and DRAM is very expensive compared to other media. NAND flash data survives through power cycles but it is still very expensive compared to a magnetic storage medium. Magnetic storage media cache offers good performance at a very low cost. On the downside, media cache takes away overall disk drive capacity from PMR or SMR main store media. MTC Technology solves this dilemma by using these diverse media components in combination to offer different levels of performance and capacity at varying price points. By carefully tuning firmware with appropriate cache types and sizes, the end user can experience excellent overall system performance. -

CUDA 11 and A100 - WHAT’S NEW? Markus Hrywniak, 23Rd June 2020 TOPICS for TODAY
CUDA 11 AND A100 - WHAT’S NEW? Markus Hrywniak, 23rd June 2020 TOPICS FOR TODAY Ampere architecture – A100, powering DGX–A100, HGX-A100... and soon, FZ Jülich‘s JUWELS Booster New CUDA 11 Toolkit release Overview of features Talk next week: Third generation Tensor Cores GTC talks go into much more details. See references! 2 HGX-A100 4-GPU HGX-A100 8-GPU • 4 A100 with NVLINK • 8 A100 with NVSwitch 3 HIERARCHY OF SCALES Multi-System Rack Multi-GPU System Multi-SM GPU Multi-Core SM Unlimited Scale 8 GPUs 108 Multiprocessors 2048 threads 4 AMDAHL’S LAW serial section parallel section serial section Amdahl’s Law parallel section Shortest possible runtime is sum of serial section times Time saved serial section Some Parallelism Increased Parallelism Infinite Parallelism Program time = Parallel sections take less time Parallel sections take no time sum(serial times + parallel times) Serial sections take same time Serial sections take same time 5 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY serial section parallel section serial section Split up serial & parallel components parallel section serial section Some Parallelism Task Parallelism Infinite Parallelism Program time = Parallel sections overlap with serial sections Parallel sections take no time sum(serial times + parallel times) Serial sections take same time 6 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY CUDA Concurrency Mechanisms At Every Scope CUDA Kernel Threads, Warps, Blocks, Barriers Application CUDA Streams, CUDA Graphs Node Multi-Process Service, GPU-Direct System NCCL, CUDA-Aware MPI, NVSHMEM 7 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY Execution Overheads Non-productive latencies (waste) Operation Latency Network latencies Memory read/write File I/O .. -

A Characterization of Processor Performance in the VAX-1 L/780
A Characterization of Processor Performance in the VAX-1 l/780 Joel S. Emer Douglas W. Clark Digital Equipment Corp. Digital Equipment Corp. 77 Reed Road 295 Foster Street Hudson, MA 01749 Littleton, MA 01460 ABSTRACT effect of many architectural and implementation features. This paper reports the results of a study of VAX- llR80 processor performance using a novel hardware Prior related work includes studies of opcode monitoring technique. A micro-PC histogram frequency and other features of instruction- monitor was buiit for these measurements. It kee s a processing [lo. 11,15,161; some studies report timing count of the number of microcode cycles execute z( at Information as well [l, 4,121. each microcode location. Measurement ex eriments were performed on live timesharing wor i loads as After describing our methods and workloads in well as on synthetic workloads of several types. The Section 2, we will re ort the frequencies of various histogram counts allow the calculation of the processor events in 5 ections 3 and 4. Section 5 frequency of various architectural events, such as the resents the complete, detailed timing results, and frequency of different types of opcodes and operand !!Iection 6 concludes the paper. specifiers, as well as the frequency of some im lementation-s ecific events, such as translation bu h er misses. ?phe measurement technique also yields the amount of processing time spent, in various 2. DEFINITIONS AND METHODS activities, such as ordinary microcode computation, memory management, and processor stalls of 2.1 VAX-l l/780 Structure different kinds. This paper reports in detail the amount of time the “average’ VAX instruction The llf780 processor is composed of two major spends in these activities. -
Instruction Set Innovations for Convey's HC-1 Computer
Instruction Set Innovations for Convey's HC-1 Computer THE WORLD’S FIRST HYBRID-CORE COMPUTER. Hot Chips Conference 2009 [email protected] Introduction to Convey Computer • Company Status – Second round venture based startup company – Product beta systems are at customer sites – Currently staffing at 36 people – Located in Richardson, Texas • Investors – Four Venture Capital Investors • Interwest Partners (Menlo Park) • CenterPoint Ventures (Dallas) • Rho Ventures (New York) • Braemar Energy Ventures (Boston) – Two Industry Investors • Intel Capital • Xilinx Presentation Outline • Overview of HC-1 Computer • Instruction Set Innovations • Application Examples Page 3 Hot Chips Conference 2009 What is a Hybrid-Core Computer ? A hybrid-core computer improves application performance by combining an x86 processor with hardware that implements application-specific instructions. ANSI Standard Applications C/C++/Fortran Convey Compilers x86 Coprocessor Instructions Instructions Intel® Processor Hybrid-Core Coprocessor Oil & Gas& Oil Financial Sciences Custom CAE Application-Specific Personalities Cache-coherent shared virtual memory Page 4 Hot Chips Conference 2009 What Is a Personality? • A personality is a reloadable set of instructions that augment x86 application the x86 instruction set Processor specific – Applicable to a class of applications instructions or specific to a particular code • Each personality is a set of files that includes: – The bits loaded into the Coprocessor – Information used by the Convey compiler • List of -

The Implementation of Prolog Via VAX 8600 Microcode ABSTRACT
The Implementation of Prolog via VAX 8600 Microcode Jeff Gee,Stephen W. Melvin, Yale N. Patt Computer Science Division University of California Berkeley, CA 94720 ABSTRACT VAX 8600 is a 32 bit computer designed with ECL macrocell arrays. Figure 1 shows a simplified block diagram of the 8600. We have implemented a high performance Prolog engine by The cycle time of the 8600 is 80 nanoseconds. directly executing in microcode the constructs of Warren’s Abstract Machine. The imulemention vehicle is the VAX 8600 computer. The VAX 8600 is a general purpose processor Vimal Address containing 8K words of writable control store. In our system, I each of the Warren Abstract Machine instructions is implemented as a VAX 8600 machine level instruction. Other Prolog built-ins are either implemented directly in microcode or executed by the general VAX instruction set. Initial results indicate that. our system is the fastest implementation of Prolog on a commercrally available general purpose processor. 1. Introduction Various models of execution have been investigated to attain the high performance execution of Prolog programs. Usually, Figure 1. Simplified Block Diagram of the VAX 8600 this involves compiling the Prolog program first into an intermediate form referred to as the Warren Abstract Machine (WAM) instruction set [l]. Execution of WAM instructions often follow one of two methods: they are executed directly by a The 8600 consists of six subprocessors: the EBOX. IBOX, special purpose processor, or they are software emulated via the FBOX. MBOX, Console. and UO adamer. Each of the seuarate machine language of a general purpose computer. -
VAX VMS at 20
1977–1997... and beyond Nothing Stops It! Of all the winning attributes of the OpenVMS operating system, perhaps its key success factor is its evolutionary spirit. Some would say OpenVMS was revolutionary. But I would prefer to call it evolutionary because its transition has been peaceful and constructive. Over a 20-year period, OpenVMS has experienced evolution in five arenas. First, it evolved from a system running on some 20 printed circuit boards to a single chip. Second, it evolved from being proprietary to open. Third, it evolved from running on CISC-based VAX to RISC-based Alpha systems. Fourth, VMS evolved from being primarily a technical oper- ating system, to a commercial operat- ing system, to a high availability mission-critical commercial operating system. And fifth, VMS evolved from time-sharing to a workstation environment, to a client/server computing style environment. The hardware has experienced a similar evolution. Just as the 16-bit PDP systems laid the groundwork for the VAX platform, VAX laid the groundwork for Alpha—the industry’s leading 64-bit systems. While the platforms have grown and changed, the success continues. Today, OpenVMS is the most flexible and adaptable operating system on the planet. What start- ed out as the concept of ‘Starlet’ in 1975 is moving into ‘Galaxy’ for the 21st century. And like the universe, there is no end in sight. —Jesse Lipcon Vice President of UNIX and OpenVMS Systems Business Unit TABLE OF CONTENTS CHAPTER I Changing the Face of Computing 4 CHAPTER II Setting the Stage 6 CHAPTER -

Vincent M. Weaver Sally A. Mckee
Optimizing for Size: Exploring the Limits of Code Density Sally A. McKee Vincent M. Weaver ASPLOS XIV Poster Session, 8 March 2009 Cornell University Chalmers University of Technology Abstract Hand-Optimized Assembly Results Architectural Size Correlations 0.9020 Minimum possible instruction size Reductions in instruction count can improve cache and bandwidth utiliza- 0.8652 Number of integer registers tion, lower power consumption, and increase overall performance. Nonethe- Total Size of Executable VLIW 2560 RISC less, code density is often overlooked when studying processor architectures. 2048 CISC 0.6623 Architecture has a zero register embedded 1536 8/16-bit 0.5845 Bit-width bytes 1024 We hand-optimize an embedded benchmark for size in assembly language -0.4366 Hardware divide in ALU on 20 different instruction set architectures and investigate the architectural 512 features that contribute most heavily to code density. 0 0.4385 Number of operands in each instruction arm ppc vax sh3 z80 ia64 6502 mips s390 i386 alphaparisc sparc m88k m68k thumb avr32 -0.3356 Unaligned load/store available x86_64 crisv32pdp-11 0.2773 Year the architecture was introduced 256 Size of LZSS Decompression Code VLIW -0.2597 Auto-incrementing addressing scheme Background RISC CISC 192 embedded -0.2597 Hardware status flags (zero/overflow/etc.) 128 8/16-bit bytes -0.1252 Little or Big endian 64 The 20 architectures investigated can be broadly broken into 5 categories: -0.0487 Branch delay slot 0 -0.0079 Maximum possible instruction size Instr Length Opcode arm ppc vax z80 sh3 ia64 mips s390 6502 i386 Type Represented Architectures alpha parisc sparc m88k m68kthumb avr32 (bytes) Args pdp-11 x86_64crisv32 VLIW ia64 16/3 3 Size of String-Search Code VLIW Other Considerations alpha, arm, m88k, mips 256 RISC RISC 4 3 CISC pa-risc, ppc, sparc 192 embedded 128 8/16-bit System libraries and compiler overhead can overshadow the effects of size bytes CISC m68k, s390, vax, x86, x86 64 1-54 2 64 optimization, increasing memory footprint by several orders of magnitude. -

Thesis May Never Have Been Completed
UvA-DARE (Digital Academic Repository) Digital Equipment Corporation (DEC): A case study of indecision, innovation and company failure Goodwin, D.T. Publication date 2016 Document Version Final published version Link to publication Citation for published version (APA): Goodwin, D. T. (2016). Digital Equipment Corporation (DEC): A case study of indecision, innovation and company failure. General rights It is not permitted to download or to forward/distribute the text or part of it without the consent of the author(s) and/or copyright holder(s), other than for strictly personal, individual use, unless the work is under an open content license (like Creative Commons). Disclaimer/Complaints regulations If you believe that digital publication of certain material infringes any of your rights or (privacy) interests, please let the Library know, stating your reasons. In case of a legitimate complaint, the Library will make the material inaccessible and/or remove it from the website. Please Ask the Library: https://uba.uva.nl/en/contact, or a letter to: Library of the University of Amsterdam, Secretariat, Singel 425, 1012 WP Amsterdam, The Netherlands. You will be contacted as soon as possible. UvA-DARE is a service provided by the library of the University of Amsterdam (https://dare.uva.nl) Download date:26 Sep 2021 Digital Equipment Corporation (DEC) (DEC) Corporation Digital Equipment David Thomas David Goodwin Digital Equipment Corporation (DEC): A Case Study of Indecision, Innovation and Company Failure David Thomas Goodwin Digital Equipment Corporation (DEC): A Case Study of Indecision, Innovation and Company Failure David Thomas Goodwin 1 Digital Equipment Corporation (DEC): A Case Study of Indecision, Innovation and Company Failure ACADEMISCH PROEFSCHRIFT ter verkrijging van de graad van doctor aan de Universiteit van Amsterdam op gezag van de Rector Magnificus prof.