WHEEL ALIGNER May 2014 All Information Contained Or Disclosed in This Document Is Considered Confidential and Proprietary by Snap-On Tools Company
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Installation and Operation Manual 8-Ccd Wireless Alignment System
IMPORTANT SAFETY INSTRUCTIONS SAVE THESE INSTRUCTIONS Please read THE ENTIRE CONTENTS OF THIS MANUAL prior to INSTALLATION AND OPERATION. BY PROCEEDING WITH ALIGNER INSTALLATION AND OPERATION YOU AGREE THAT YOU FULLY UNDERSTAND AND COMPREHEND THE FULL CONTENTS OF THIS MANUAL. FORWARD THIS MANUAL TO ALL OPERATORS. Revision D 07-01-11 P/N 5900120 INSTALLATION AND OPERATION MANUAL 8-CCD WIRELESS ALIGNMENT SYSTEM MODEL: CRT380R RECEIVING BE SAFE The shipment should be thoroughly inspected as soon as it Your new alignment system was designed and built with is received. The signed Bill of Lading is acknowledgement safety in mind. However, your overall safety can be by the shipping carrier as receipt of this product as listed increased with proper training and thoughtful operation in your invoice as being in a good condition of shipment. If on the part of the operator. DO NOT operate or repair this any of these goods listed on this Bill of Lading are missing equipment without reading this manual and the important or damaged, do not accept goods until the shipping carrier safety instructions shown inside. Keep this operation man- makes a notation on the freight bill of the missing or dam- ual near the alignment system at all times. Make sure that aged goods. Do this for your own protection. ALL USERS read and understand this manual. 1645 Lemonwood Dr. Santa Paula, CA. 93060, USA Toll Free 1-800-253-2363 Tel: 1-805-933-9970 Fax: 1-805-933-9160 www.bendpak.com READ THIS ENTIRE MANUAL BEFORE OPERATION BEGINS. RECORD HERE THE FOLLOWING INFORMATION WHICH IS LOCATED ON THE SERIAL NUMBER DATA TAG PRODUCT WARRANTY Your new alignment system is warranted for one year on equipment structure; one year on all operat- ing components and tooling/accessories, to the original purchaser, to be free of defects in material and workmanship. -

Designed for Speed : Three Automobiles by Ferrari
Designed for speed : three automobiles by Ferrari Date 1993 Publisher The Museum of Modern Art Exhibition URL www.moma.org/calendar/exhibitions/411 The Museum of Modern Art's exhibition history— from our founding in 1929 to the present—is available online. It includes exhibition catalogues, primary documents, installation views, and an index of participating artists. MoMA © 2017 The Museum of Modern Art * - . i . ' ' y ' . Designed for Speed: Three Automobiles by Ferrari k \ ' . r- ; / THE MUSEUM OF MODERN ART, NEW YORK The nearer the automobile approaches its utilitarian ends, the more beautiful it becomes. That is, when the vertical lines (which contrary to its purpose) dominated at its debut, it was ugly, and people kept buying horses. Cars were known as "horseless carriages." The necessity of speed lowered and elongated the car so that the horizontal lines, balanced by the curves, dominated: it became a perfect whole, logically organized for its purpose, and it was beautiful. —Fernand Leger "Aesthetics of the Machine: The Manufactured Object, The Artisan, and the Artist," 1924 M Migh-performance sports and racing cars represent some of the ultimate achievements of one of the world's largest industries. Few objects inspire such longing and acute fascination. As the French critic and theorist Roland Barthes observed, "I think that cars today are almost the exact equiv alent of the great Gothic cathedrals: I mean the supreme creation of an era, conceived with passion by unknown artists, and consumed in image if not in usage by a whole population which appropriates them as a purely magical object." Unlike most machines, which often seem to have an antagonistic relationship with people, these are intentionally designed for improved handling, and the refinement of the association between man and machine. -

The Study for Anti-Rollover Performance Based on Fishhook
3rd International Conference on Material, Mechanical and Manufacturing Engineering (IC3ME 2015) The Study For Anti-Rollover Performance Based On Fishhook and J Turn Simulation Fei Xiong1,a, Fengchong Lan1,b, Jiqing Chen1,c*,Yunjiao Zhou1,d 1 South China University of Technology, Guangzhou, China [email protected], [email protected], [email protected],[email protected] Keywords: Fishhook test, J-turn test, Tire vertical force, Anti-roll bar、HCG Abstract. SUV (Sport UtilityVehicle, SUV) HCG (Height of Center Gravity) is higher, relatively low rollover stability, higher rollover accident rate has become an important issue for cars safety. In this paper, Firstly, four-DOF kinematics theoretical vehicle model was established,then combined with a SUV development and design work and built a complete multi-body dynamics model in ADAMS / Car. Based on steady state constant radius handling case and transient sine-swept handling case, the dynamic model was calibrated and corelated to handling test results. At last, to launch a study for the anti rollover performance based on fishook and J Turn simulation, respectively analyzed how front and rear anti-roll bar 、the CGH contribute to the anti-rollover performance of a vehicle, this study is benefcial to the development process of suspension and the design for anti-roll performance of whole vhicle,so it has very important significance. Introduction The National Highway Traffic safety administration (National Highway Traffic SafetyAdministration, NHTSA) statistics show that in 2011, caused by the vehicle rollover accidents accounted for only 2.1% of the total Traffic accident, but the deaths of 7382 people, accounting for 34.7% of the total Traffic accident death toll. -

Adaption and Evaluation of Transversal Leaf Spring Suspension Design for a Lightweight Vehicle Using Adams /C Ar
ADAPTION AND EVALUATION OF TRANSVERSAL LEAF SPRING SUSPENSION DESIGN FOR A LIGHTWEIGHT VEHICLE USING ADAMS /C AR FLORIAN CHRIST Master Thesis in Vehicle Engineering Vehicle Dynamics Aeronautical and Vehicle Engineering Royal Institute of Technology TRITA-AVE 2015:09 ISSN 1651-7660 Adaption and Evaluation of Transversal Leaf Spring Suspension Design for a Lightweight Vehicle using Adams/Car FLORIAN CHRIST © Florian Christ, 2015. Vehicle Dynamics Department of Aeronautical and Vehicle Engineering Kungliga Tekniska Högskolan SE-100 44 Stockholm Sweden ii Abstract This investigation deals with the suspension of a lightweight medium-class vehicle for four passengers with a curb weight of 1000 kg. The suspension layout consists of a transversal leaf spring and is supported by an active air spring which is included in the damper. The lower control arms are replaced by the leaf spring ends. Active ride height control is introduced to compensate for different vehicle load states. Active steering is applied using electric linear actuators with steer-by wire design. Besides intense use of light material the inquiry should investigate whether elimination of suspension parts or a lighter component is concordant with the stability demands of the vehicle. The investigation is based on simulations obtained with MSC Software ADAMS/Car and Matlab. The suspension is modeled in Adams/Car and has to proof it's compliance in normal driving conditions and under extreme forces. Evaluation criteria are suspension kinematics and compliance such as camber, caster and toe change during wheel travel in different load states. Also the leaf spring deflection, anti-dive and anti-squat measures and brake force distribution are investigated. -
Wheel Alignment Simplified
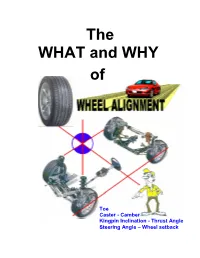
The WHAT and WHY of Toe Caster - Camber Kingpin Inclination - Thrust Angle Steering Angle – Wheel setback WHEEL ALIGNMENT SIMPLIFIED Wheel alignment is often considered complicated and hard to understand In the days of the rigid chassis construction with solid axles, when tyres were poor and road speeds were low, wheel alignment was simply a matter of ensuring that the wheels rolled along the road in parallel paths. This was easily accomplished by means of using a toe gauge or simple tape measure. The steering wheel could then also simply be repositioned on the splines of the steering shaft. Camber and Caster was easily adjustable by means of shims. Today wheel alignment is of course more sophisticated as there are several angles to consider when doing wheel alignment on the modern vehicle with Independent suspension systems, good performing tyres and high road speeds. Below are the most common angles and their terminology and for the correction of wheel alignment and the diagnoses thereof, the understanding of the principals of these angles will become necessary. Doing the actual corrections of wheel alignment is a fairly simple task and in many instances it is easily accomplished by some mechanical adjustments. However Wheel Alignment diagnosis is not so straightforward and one will need to understand the interaction between the wheel alignment angles as well as the influence the various angles have on each other. In addition there are also external factors one will need to consider. Wheel Alignment Specifications are normally given in angular values of degrees and minutes A circle consists of 360 segments called DEGREES, symbolized by the indicator ° Each DEGREE again has 60 segments called MINUTES symbolized by the indicator ‘. -

2008-2009 Design and Fabrication of a SAE Baja Race Vehicle
2008-2009 Design and Fabrication of a SAE Baja Race Vehicle A Major Qualifying Project Report Submitted to the Faculty of WORCESTER POLYTECHNIC INSTITUTE In partial fulfillment of the requirements for the Degree of Bachelor of Science By: ____________________________ Derek Britton ____________________________ Jessy Cusack ____________________________ Alex Forti ____________________________ Patrick Goodrich ____________________________ Zachary Lagadinos ____________________________ Benjamin Lessard ____________________________ Wayne Partington ____________________________ Ethan Wyman Date: April 29,2009 ____________________________ Kenneth Stafford, Advisor ____________________________ James Van De Ven, Advisor ____________________________ Torbjorn Bergstrom, Advisor 1 Table of Contents List of Figures ..................................................................................................................... 5 List of Tables ...................................................................................................................... 9 Introduction ....................................................................................................................... 10 Design Goals ..................................................................................................................... 11 Chassis .............................................................................................................................. 13 Ergonomics................................................................................................................... -

STEERTEK for International Truck Multilink FAS
STEERTEK for International Truck Multilink FAS SUBJECT: Service Instructions LIT NO: 17730-258 DATE: December 2008 REVISION: B TABLE OF CONTENTS Section 1 Introduction . 2 Section 9 Component Replacement Fasteners . 30 Section 2 Product Description. 3 Axle Brackets . 30 Steering Knuckle Section 3 Important Safety Notice . 4 Steering Knuckle Disassembly . 30 Kingpin Preparation & Measurement . 31 Section 4 Parts List. 8 Kingpin Bushing Removal . 33 Section 5 Towing Procedures . 9 Steering Knuckle Bore Measurement . 34 Kingpin Bushing Installation. 35 Section 6 Special Tools . 12 Kingpin Bushing Reaming . 35 Kingpin Seal Installation . 37 Section 7 Preventive Maintenance Steering Knuckle Assembly . 38 Visual Inspection . 13 Tie Rod End and Cross Tube . 40 Lubrication Intervals. 13 Kingpin Lubrication . 14 Section 10 Troubleshooting Guide . 42 Tie Rod End Lubrication . 14 Tie Rod End Inspection. 15 Section 11 Torque Specifications . 44 Tire Inspection. 17 Section 12 Front Alignment Specifications . 45 Kingpin Bushing Inspection . 20 Steering Knuckle Inspection . 21 Reference Materials. 46 Section 8 Alignment & Adjustments Technical Procedure Publication Quiz . 47 Alignment Definitions . 22 General Inspection Prior to Alignment. 24 Front Wheel Alignment . 25 Steering Stop. 27 Toe Setting . 28 STEERTEK for International Truck Multilink FAS SECTION 1 Introduction This publication is intended to acquaint and assist maintenance personnel in the preven- tive maintenance, service, repair, and rebuild of the following Hendrickson equipment as installed on applicable International Truck Multilink Front Air Suspension (FAS) vehicles. Carefully read and understand all safety related information within this publication, on all decals and in all such materials provided by the vehicle manufacturer before conducting any maintenance, service or repair. ■ STEERTEK — A lightweight, formed and robotically welded steer axle assembly. -
Installation Instructions
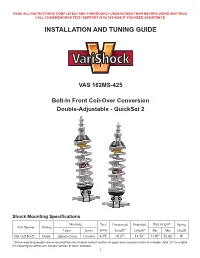
READ ALL INSTRUCTIONS COMPLETELY AND THOROUGHLY UNDERSTAND THEM BEFORE DOING ANYTHING. CALL CHASSISWORKS TECH SUPPORT (916) 388-0288 IF YOU NEED ASSISTANCE. INSTALLATION AND TUNING GUIDE VAS 162MS-425 Bolt-In Front Coil-Over Conversion Double-Adjustable - QuickSet 2 Shock Mounting Specifi cations Mounting Total Compressed Extended Ride Height* Spring Part Number Valving Upper LowerTravel Length* Length* Min. Max. Length VAS 162MS-425 Double Spherical Stem Crossbar 4.25” 10.27” 14.52” 11.97” 12.82” 9” * Shock mounting lengths are measured from the chassis contact surface of upper stem to pivot center of crossbar. Add .20” to lengths if measuring to control arm contact surface of lower crossbar. 1 PARTS LIST Prior to beginning installation use the following parts lists to verify that you have received all components required for installation. VAS 162MS-425 - VariShock QuickSet 2 Coil-Overs Part Number Qty Description 8A24XAX-43CH 2 QuickSet 2 Coil-Over Shock, Upper Stem and Short Lower Poly Mounts 3173-09-20-32 2 Bumpstop 1-1/4” long 899-020-208 2 Ball-Stud Top Mount Hardware VAS 501-103 1 Spring Seat Set, Extended 3/4” 3102-056-18RC 2 Jam Nut 9/16-18 RH, Clear Zinc 899-061-304 1 Crossbar Hardware Bag 899-012-HEX7/64 1 Ball-End Driver 7/64” Hex Screw 899-020-208 - Ball-Stud Top Mount Hardware Part Number Qty Description 3117-063-18C 1 Half Locknut 5/8-18 Nylon Insert 3144-25-28-0 1 Grease Zerk 1/4-28 Straight 899-044.63-1.13 1 Washer .635” ID x 1.13” OD, Zinc-Plated Steel 899-044.70-1.25 1 Washer .695” ID x 1.25” OD, Zinc-Plated Steel 899-060-201 -
MY22 Sequoia Ebrochure
2022 Sequoia Page 1 2022 SEQUOIA Room for everyone and everything. Whether you’re navigating through the urban jungle or traveling off the beaten path, the 2022 Toyota Sequoia is ready to turn every drive into an adventure. Three rows of seats let you bring up to eight, while its spacious interior and powerful 5.7L V8 engine let you load it up and haul even more, to make the most of the places you’ll go. Limited shown in Shoreline Blue Pearl. Cover image: See footnotes 1 and 2 for information on towing and roof payload. See numbered footnotes in Disclosures section. Page 2 INTERIOR In Sequoia, everyone gets to ride first class. Hear Comfort your music like never before with the available JBL®3 within reach. Premium Audio system, and let your rear-seat passengers catch up on their favorite movies with the available rear-seat Blu-ray Disc™ player. Platinum interior shown in Red Rock leather trim. Simulation shown. Heated and ventilated front seats Moonroof Three-zone climate control The available heated and ventilated front Let more of the outside in with Sequoia’s The driver, front passenger and rear seats found inside Sequoia Platinum give standard one-touch tilt/slide power passengers will be comfortable inside the driver and front passenger more comfort moonroof with sliding sunshade. Open Sequoia, thanks to its three-zone automatic and the option to warm up or cool down it up to let in some fresh air, brighten climate control in the front and rear of the with the touch of a button. -

Trim Height Inspection
3/11/2016 Document ID: 745583 2004 C adillac Escalade - AWD [1gyek63n34r121918] | Avalanche, Escalade, Suburban, Tahoe, Yukon VIN C /K Service Manual | Suspension | Wheel Alignment | Specifications | Document ID: 745583 Trim Height Inspection Trim Height Measurements Trim height is a predetermined measurement relating to vehicle ride height. Incorrect trim heights can cause bottoming out over bumps, damage to the suspension components and symptoms similar to wheel alignment problems. Check the trim heights when diagnosing suspension concerns and before checking the wheel alignment. Perform the following before measuring the trim heights: Make sure the vehicle is on a level surface, such as an alignment rack. Remove the alignment rack floating pins. Set the tire pressures to the pressure shown on the certification label. Refer to Vehicle Certification Label in General Information. Check the fuel level. Add additional weight if necessary to simulate a full tank. To ensure proper weight distribution make sure the rear storage compartment is empty. Close the doors and hood. Z Height Measurement Important: K models only the Z height must be adjusted before the alignment. The Z height dimension measurement determines the proper ride height for the front end of the vehicle. Vehicles equipped with torsion bars use a adjusting arm in order to adjust the Z height dimension. Vehicles without torsion bars have no adjustment and could require replacement of suspension components. Important: All dimensions are measured vertical to ground. Cross vehicle Z heights should be within 12 mm (0.47 in) to be considered correct. 1. Place hand on the front bumper and jounce the front of the vehicle. -

Honda Quits F1! Japanese Manufacturer to Bring Curtain Down on Race-Winning Programme
>> Britain’s Land Speed Record attempt update – see p36 December 2020 • Vol 30 No 12 • www.racecar-engineering.com • UK £5.95 • US $14.50 Honda quits F1! Japanese manufacturer to bring curtain down on race-winning programme CASH CONTROL We reveal the details of Formula 1’s Concorde deal SAFETY CELL The latest in composite chassis technology design INDYCAR SCREEN Aerodine on building US single seater safety device VIRTUAL TRADE Exciting new engineering products for the 2021 season 01 REV30N12_Cover_Honda-ACbs.indd 1 19/10/2020 12:56 THE EVOLUTION IN FLUID HORSEPOWER ™ ™ XRP® ProPLUS RaceHose and ™ XRP® Race Crimp Hose Ends A full PTFE smooth-bore hose, manufactured using a patented process that creates convolutions only on the outside of the tube wall, where they belong for increased flexibility, not on the inside where they can impede flow. This smooth-bore race hose and crimp-on hose end system is sized to compete directly with convoluted hose on both inside diameter and weight while allowing for a tighter bend radius and greater flow per size. Ten sizes from -4 PLUS through -20. Additional "PLUS" sizes allow for even larger inside hose diameters as an option. CRIMP COLLARS Two styles allow XRP NEW XRP RACE CRIMP HOSE ENDS™ Race Crimp Hose Ends™ to be used on the ProPLUS Black is “in” and it is our standard color; Race Hose™, Stainless braided CPE race hose, XR- Blue and Super Nickel are options. Hundreds of styles are available. 31 Black Nylon braided CPE hose and some Bent tube fixed, double O-Ring sealed swivels and ORB ends. -

Cal Poly Supermileage Drivetrain Assembly Final Design
Project Advisor: John Fabijanic Club Advisor: Dr. Joseph Mello ME: 429-01 Fall 2017 June 13th, 2018 Justin B. Miller CAL POLY [email protected] SUPERMILEAGE Heather A. Fields [email protected] DRIVETRAIN Mike R. Bolton Final Design Report [email protected] Statement of Disclaimer Since this project is a result of a class assignment, it has been graded and accepted as fulfillment of the course requirements. Acceptance does not imply technical accuracy or reliability. Any use of information in this report is done at the risk of the user. These risks may include catastrophic failure of the device or infringement of patent or copyright laws. California Polytechnic State University at San Luis Obispo and its staff cannot be held liable for any use or misuse of the project. 2 Table of Contents 0.0 EXECUTIVE SUMMARY 10 1.0 INTRODUCTION 11 2.0 BACKGROUND 12 2.1 PAST AND CURRENT SUPERMILEAGE DRIVETRAIN DESIGNS 12 2.1.1 2018 SHELL ECO-MARATHON RULEBOOK ADHERENCE 12 2.1.2 FORMER CAL POLY DRIVETRAIN DESIGNS 12 2.1.3 UNIVERSITЀ LAVAL 14 2.1.4 UNIVERSITY OF TORONTO 14 2.2 CLUTCH 15 2.3 POWER TRANSMISSION METHODS 16 2.4 SPROCKET 18 2.4.1 REDUCTION AND STAGES 18 2.4.2 SPROCKET MATERIAL 19 2.5 LUBRICATION 20 2.6 HUB & FREEWHEEL 20 2.6.1 PAWL DESIGN 21 2.6.2 FREECOASTER CLUTCHED DESIGN 21 2.6.3 AVAILABILITY OF LHD COMPONENTS 22 2.7 ALIGNMENT AND TOLERANCES 22 2.8 LOCATING PINS 23 2.9 CMM CAPABILITIES 23 2.10 FLATNESS IN SHEET METAL 23 2.11 WATERJET CUTTING CARBON FIBER 23 2.12 DRIVETRAIN EFFICIENCY MEASUREMENTS 24 3.0 OBJECTIVES 25 3.1 QUALITY FUNCTION DEPLOYMENT 25 3.2 BUDGET AND COST 26 3.3 EFFICIENCY 26 3.4 HUB/SPROCKET PLAY 26 3.5 WEIGHT 26 3.6 SIZE 26 3.7 MANUFACTURABILITY 26 4.0 DESIGN DEVELOPMENT 27 4.1 DRIVE SYSTEM 27 4.1.1 CHAIN VS.