Pilot Operation Report
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Eurail Group G.I.E
Eurail Group G.I.E. Eurail Group G.I.E. Eurail Group G.I.E. Eurail Group G.I.E. Eurail Group G.I.E. Eurail Group G.I.E. Eurosender Benefit: Pass holders benefit from a 20% discount on the Eurosender online platform when placing an order to send a package or parcel. Benefit code: RAIL20 Info: Follow the steps below to redeem the Benefit: 1. Visit Eurosender website: www.eurosender.com 2. Choose your to and from countries from the list. 3. Select the number of packages or parcels to be sent and click ‘NEXT’. 4. Fill in the order form. 5. Insert the Benefit code RAIL20 in the box “discount code”. The new price and amount of discount will be displayed. 6. Select the payment method and insert your payment details. 7. Receive order confirmation. For any problems or questions regarding your order or the service, Eurosender customer support department is available on Tel: +44 (0)20 3318 3600 or by email at [email protected]. Please note: The Benefit code is valid only for a single user. The code has no expiration date and it can be transferrable. This Benefit is valid only for standard shipping orders. Benefit: Eurail and Interrail Pass holders benefit from 20% off Stasher Luggage Storage. Book online to store your bags safely while you explore the city – all across Europe. Use EURAIL20 or INTERRAIL20 for 20% off the entire booking (including insurance). Info: Follow the steps below to redeem the Benefit 1. Visit Stasher.com 2. Enter the location where you wish to store your bag 3. -

IRG-Rail (14) 2A - Annexes to the Annual Market Monitoring Report
Independent Regulators’ Group – Rail IRG–Rail Annexes to the 2nd IRG-Rail Annual Market Monitoring Report 27 February 2014 IRG-Rail (14) 2a - Annexes to the Annual Market Monitoring Report Index 1. Country sheets market structure.................................................................................2 2. Common list of definitions and indicators .................................................................11 3. Graphs not used in the report...................................................................................14 1 IRG-Rail (14) 2a - Annexes to the Annual Market Monitoring Report 1. Country sheets market structure Regulatory Authority: Schienen-Control GmbH Country: Austria Date of legal liberalisation of : Freight railway market: 9 January 1998. Passenger railway market: 9 January 1998. Date of entry of first new entrant into market: Freight: 1 April 2001. Passenger: 14 December 2003. Ownership structure Freight RCA: 100% public Lokomotion: 30% DB Schenker, 70% various institutions with public ownership WLC: 100% public LTE: 100% public (was 50% private, new partner to be announced soon) Logserv: 100% private TXL: 100% public (Trenitalia) GySEV: 93.8% public SLB, STB, GKB, MBS: 100% public RTS: 100% private RPS: 100% private Passenger ÖBB PV 100% public WLB, GKB, StLB, MBS, StH, SLB: 100% public CAT: 49.9% ÖBB PV, 50.1% Vienna Airport (public majority) WESTbahn: 74% private, 26% public (SNCF Voyages) Regulatory Authority: Rail Market Regulatory Agency Country: Croatia Date of legal liberalisation of : Freight railway market: 1 January 2005. Passenger railway market: 1 January 2005. Date of entry of first new entrant into market: Freight: no new entrant. Passenger: no new entrant. Ownership structure Freight 100% public Passenger 100% public 2 IRG-Rail (14) 2a - Annexes to the Annual Market Monitoring Report Regulatory Authority: Danish Rail Regulatory Body Country: Denmark Date of legal liberalisation of : Freight railway market: Beginning June 27th 1997. -

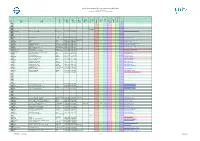
List of Numeric Codes for Railway Companies (RICS Code) Contact : [email protected] Reference : Code Short
List of numeric codes for railway companies (RICS Code) contact : [email protected] reference : http://www.uic.org/rics code short name full name country request date allocation date modified date of begin validity of end validity recent Freight Passenger Infra- structure Holding Integrated Other url 0006 StL Holland Stena Line Holland BV NL 01/07/2004 01/07/2004 x http://www.stenaline.nl/ferry/ 0010 VR VR-Yhtymä Oy FI 30/06/1999 30/06/1999 x http://www.vr.fi/ 0012 TRFSA Transfesa ES 30/06/1999 30/06/1999 04/10/2016 x http://www.transfesa.com/ 0013 OSJD OSJD PL 12/07/2000 12/07/2000 x http://osjd.org/ 0014 CWL Compagnie des Wagons-Lits FR 30/06/1999 30/06/1999 x http://www.cwl-services.com/ 0015 RMF Rail Manche Finance GB 30/06/1999 30/06/1999 x http://www.rmf.co.uk/ 0016 RD RAILDATA CH 30/06/1999 30/06/1999 x http://www.raildata.coop/ 0017 ENS European Night Services Ltd GB 30/06/1999 30/06/1999 x 0018 THI Factory THI Factory SA BE 06/05/2005 06/05/2005 01/12/2014 x http://www.thalys.com/ 0019 Eurostar I Eurostar International Limited GB 30/06/1999 30/06/1999 x http://www.eurostar.com/ 0020 OAO RZD Joint Stock Company 'Russian Railways' RU 30/06/1999 30/06/1999 x http://rzd.ru/ 0021 BC Belarusian Railways BY 11/09/2003 24/11/2004 x http://www.rw.by/ 0022 UZ Ukrainski Zaliznytsi UA 15/01/2004 15/01/2004 x http://uz.gov.ua/ 0023 CFM Calea Ferată din Moldova MD 30/06/1999 30/06/1999 x http://railway.md/ 0024 LG AB 'Lietuvos geležinkeliai' LT 28/09/2004 24/11/2004 x http://www.litrail.lt/ 0025 LDZ Latvijas dzelzceļš LV 19/10/2004 24/11/2004 x http://www.ldz.lv/ 0026 EVR Aktsiaselts Eesti Raudtee EE 30/06/1999 30/06/1999 x http://www.evr.ee/ 0027 KTZ Kazakhstan Temir Zholy KZ 17/05/2004 17/05/2004 x http://www.railway.ge/ 0028 GR Sakartvelos Rkinigza GE 30/06/1999 30/06/1999 x http://railway.ge/ 0029 UTI Uzbekistan Temir Yullari UZ 17/05/2004 17/05/2004 x http://www.uzrailway.uz/ 0030 ZC Railways of D.P.R.K. -

Annex to 3Rd IRG-Rail Market Monitoring Report
IRG-Rail (15) 02a_rev1 Independent Regulators’ Group – Rail IRG–Rail Annexes to the 3rd IRG-Rail Annual Market Monitoring Report March 2015 IRG-Rail Annexes to the Annual Market Monitoring Report Index 1. Country sheets market structure.................................................................................2 2. Common list of definitions and indicators ...............................................................299 3. Graphs and tables not used in the report................................................................322 1 IRG-Rail Annexes to the Annual Market Monitoring Report 1. Country sheets market structure Regulatory Authority: Schienen-Control GmbH Country: Austria Date of legal liberalisation of : Freight railway market: 9 January 1998. Passenger railway market: 9 January 1998. Date of entry of first new entrant into market: Freight: 1 April 2001. Passenger: 14 December 2003. Ownership structure Freight RCA: 100% public Lokomotion: 30% DB Schenker, 70% various institutions with public ownership LTE: 100% public (was 50% private, new partner to be announced May 2015) Cargoserv, Ecco-Rail, RTS: 100% private TXL: 100% public (Trenitalia) Raaberbahn Cargo: 93.8% public SLB, STB, GKB, MBS, WLC: 100% public RPA: 53% private, 47% public (City of Hamburg: 68% HHLA, HHLA: 85% Metrans, Metrans: 80% RPA) Passenger ÖBB PV 100% public WLB, GKB, StLB, MBS, StH, SLB: 100% public CAT: 49.9% ÖBB PV, 50.1% Vienna Airport (public majority) WESTbahn: 74% private, 26% public (SNCF Voyageurs) Main developments Rail freight traffic once again receded slightly in 2013 on the previous year. The new entrants could raise their market share in traffic frequency (tons) from 23.2 to 24.9 percent, and their share in transport performance (net tons per kilometre) rose from 17.6 to 19.3 percent. -

TAF TSI Implementation in Trainose
PRESENTATION 7th Regional TAF TSI Workshop Bucharest, 7-8 March 2018 Panagiotis Georgas – Developer, Department of Technology, Information Systems & Networks Athens, 1 February 2018 1 Photo: K. Kakavas, 2016 Business overview 1/2 TRAINOSE S.A. was established in 19.12.2005. Since 2007 TRAINOSE operates as an independent RU. In 14 September 2017 the Company’s total shares (100%) were transferred to FSI and TRAINOSE became a member of the FSI GROUP. Today, the key activities of the Company include: ✓ The development, organization and operation of the urban, suburban, regional, intercity and international passenger and freight railway transportation, as well as all kinds of transportation, ✓ The development, organization and operation of multimodal transportation, ✓ The provision of logistics and related services, ✓ The organization, provision and operation of sleeping cars and catering services to passengers, ✓ The provision of consulting services relevant to the scope of activities of the Company. 2 TRAINOSE SA. - Freight Transport Sector Business overview 2/2 ✓ Passenger transport services - mainly Suburban in Athens and Thessaloniki and Intercity services on the Athens -Thessaloniki axis. ✓ Freight transport services - mainly from/to Piraeus or Thessaloniki to/from or throught Bulgaria, FYROM (Former Yugoslav Republic of Macedonia), Serbia, Hungary and other Central European countries such as Germany, Austria and Poland. ✓ Limited number of bus services. 3 TRAINOSE SA. - Freight Transport Sector Alternative Routes Manheim Wurzburg From/to Athens/Thessaloniki: ✓ via Idomeni/Gevgelija (FYROM), ✓ via Promachonas/Kulata (Bulgaria) and Dikea/Svilengrad (Bulgaria), ✓ via Pythion/Uzunkopru (Turkey). Svilengrad Uzunkopru Kulata Gevgelija Komanos Thessaloniki Plati Larissa Velestino Aspropirgos Athens N.Ikonion Port 4 TRAINOSE SA. -
List of Numeric Codes for Railway Companies
List of numeric codes for railway companies (RICS Code) contact : [email protected] reference : http://www.uic.org/spip.php?article311 code short name full name country request date allocation date modified date beginof validity of end validity recent Freight Passenger Infra- structure Holding Integrated Other url 0001 0002 0003 0004 0005 01/02/2011 0006 StL Holland Stena Line Holland BV Netherlands 01/07/2004 01/07/2004 x http://www.stenaline.nl/ferry/ 0007 0008 0009 0010 VR VR-Yhtymä Oy Finland 30/06/1999 30/06/1999 x http://www.vr.fi/fi/ 0011 0012 TF Transfesa Spain 30/06/1999 30/06/1999 10/09/2013 x http://www.transfesa.com/ 0013 OSJD OSJD Poland 12/07/2000 12/07/2000 x http://osjd.org/ 0014 CWL Compagnie des Wagons-Lits France 30/06/1999 30/06/1999 x http://www.cwl-services.com/ 0015 RMF Rail Manche Finance United Kingdom 30/06/1999 30/06/1999 x http://www.rmf.co.uk/ 0016 RD RAILDATA Switzerland 30/06/1999 30/06/1999 x http://www.raildata.coop/ 0017 ENS European Night Services Ltd United Kingdom 30/06/1999 30/06/1999 x 0018 THI Factory THI Factory SA Belgium 06/05/2005 06/05/2005 01/12/2014 x http://www.thalys.com/ 0019 Eurostar I Eurostar International Limited United Kingdom 30/06/1999 30/06/1999 x http://www.eurostar.com/ 0020 OAO RZD Joint Stock Company 'Russian Railways' Russia 30/06/1999 30/06/1999 x http://rzd.ru/ 0021 BC Belarusian Railways Belarus 11/09/2003 24/11/2004 x http://www.rw.by/ 0022 UZ Ukrainski Zaliznytsi Ukraine 15/01/2004 15/01/2004 x http://uz.gov.ua/ 0023 CFM Calea Ferată din Moldova Moldova 30/06/1999 30/06/1999 -

Trainose the Critical Link to the Global Supply Chains from Asia to the European Hinderland
TRAINOSE THE CRITICAL LINK TO THE GLOBAL SUPPLY CHAINS FROM ASIA TO THE EUROPEAN HINDERLAND 1 2 is publically owned and the only rail operator in Greece • It performs 330 line services .150 Freight & shunting locomotives • With less than 900 employees .3000freight wagons fulfilling UIC standards Locomotive MLW Α-450 Power: 1.200hp (890kW) ~ 2,750hp (2,050 kW) Drive Shafts number : 6 Locomotive MLW Α-504, Α-506 Power: 3.000hp (2.240kW) ~ 3,600hp (2,680 kW) Drive Shafts number: 6 Containers 40 ft (width 8ft 6ins, ISO standardized) και 45 ft (high cube, pallet- wide) on wagon type 362 The company Overview: •As part of the infrastructure company TRAINOSE has a continuous history of 150 years of operation (the longer service disruption during Word War II for 2 months (the first days of the German occupation in 1941 when all locomotives were destroyed by the engine drivers) • At its current structure as an operator was established as subsidiary of OSE, S.A. the infrastructure company, in 2005 and as an independent Rail Service Operator in 2007 •From 2007 to 2009 it had an operational deficit (annual) of 240 million euro • In 2010 an ambitious 2-year restructuring plan was designed and implemented (detailed next) •In 2012 the company the restructuring was successfully completed and TRAINOSE presented earnings of 1.2 million euro EBITA 4 Overview of the restructuring plan : 1. Transfer of approximately 800 employees from TRAINOSE to the Greek Government (45% of the workforce) from 1650 down to 860 2. Suspension of loss making service and implementation of new train schedules (40% reduction in operating lines) 3. -

TAF - TSI Regional Meeting Bucharest 7-8 March 2018
TAF - TSI Regional Meeting Bucharest 7-8 March 2018 TAF / TAP - TSI implementation in Greece: Design and development of scalable TAF / TAP - TSI systems Kostas Dalivigkas - Greek NCP Contents • Present situation in Greece • Greek railway authorities • Implementation of the TEN-T Network • Scope and Objectives • Contribution • Readiness - Technical Maturity • Activities Bucharest 7-8 March 2018 Present situation in Greece • The current network amount to 2,265 km (lines in operation), 80% of which is standard gauge, as is the standard in Europe and internationally • The network connects Greece with FYROM (Gevgelija), Bulgaria (Kulata), Turkey (Uzunkopru) and the rest of the world through the port of Piraeus Bucharest 7-8 March 2018 Present situation in Greece • In 2017, the overall freight tonnage exceeded 1.3 M tonnes • Most freight carried was Imports (51%) and Exports (36%). • Freight tonnage was increased by 21.5% compared to 2016 Bucharest 7-8 March 2018 Greek Railway Authorities RAS MINISTRY OF Regulatory TRANSPORT (ROLLING Authority for STOCK OWNER) Railways GAIAOSE S.A. OSE S.A. EESSTY S.A. Rolling Stock Manager (W.K.) Infrastructure Manager (I.M.) Rolling Stock Maintenance ERGOSE S.A. Infrastructure Construction Manager RAILWAY OPERATORS (RU) Piraeus Europe Asia Rail TRAINOSE S.A. Rail Cargo Logistics Logistics S.A. Member of FSI group GOLDAIR PEARL Bucharest 7-8 March 2018 Greek Railway Authorities (RAS) The Regulatory Authority for Railways , established in November 2010, is responsible for: •Regulating the railway transport -

Diapositiva 1
Perspectives for TRAINOSE and Greece through the Presence of the FS Italiane Group Ferrovie dello Stato Italiane Group Organizational structure Ministry of Economy and Finance Ministry of Infrastructure and Transport 100% Ferrovie dello Stato Italiane 100% 100% 100% 100% 100% RFI Trenitalia Italferr ANAS Group* Mercitalia Group Rail infrastructure Operator of Railway Roadway infrastructure Integrated logistic manager passenger rail engineering manager and operator operator (rail and road) transport company 51% 55,7% 100% 100% Netinera Group Italcertifer BusItalia Group TX Logistik Other Companies Operator of regional Company for certification Operator Rail freight passenger transport (rail of rail components and of public bus operator (Europe) transport and road) in Germany systems 100% 100% 100% 100% Trenitalia UK C2C Qbuzz Trainose Operator of Local public transport Railway company for passenger rail service company in the passenger and freight rail Netherlands transport in Greece transport in UK 8 *Administrative issues under finalization FS Italiane Group – Strategic plan 2017-2026 Modal Growth in rail transport Integration 1 services abroad Passenger Development of local public transport abroad, 2 mainly relying on the Integrated International international presence of Logistics development the Group by acquisition Growth abroad for the construction of major 3 infrastructure as General Contractor Digital & Integrated customer infrastructure centricity 7 Our financial performance Net result (M€) 552 Year 2017 Revenues 9.299 -

Thessaloniki’S METRO (Red Line) and Its Future Extensions
Action 3.1: Mapping ongoing public and private investments ACTION 3.1: MAPPING ONGOING PUBLIC AND PRIVATE INVESTMENTS 1 1. INTRODUCTION 2 2. DESCRIPTION OF TRANSPORTATION SERVICES PROVIDED IN THE HUB 3 1.1 Transport services at urban / regional level and key actors in policy making and service provision 3 1.1.1 Transport services at national level and key actors in policy making and service provision 11 1.1.2 Transport services at transnational level and key actors in policy making and service provision 16 3. DESCRIPTION OF THE LEGAL BACKGROUND OF THE ORGANIZATIONS INVOLVED IN TRANSPORT PROVISION 21 4. MAPPING OF ONGOING AND PLANNED INVESTMENTS 25 5. CONCLUSIONS 33 6. REFERENCES 36 LIST OF FIGURES Figure 1: Urban area served by OASTH................................................................................................................................... 4 Figure 2: The basic axis of Thessaloniki’s METRO (red line) and its future extensions .......................................................... 4 Figure 3: Suburban area served by OASTH ............................................................................................................................. 5 Figure 4: Intermodal connectivity in Thessaloniki’s hub ........................................................................................................ 6 Figure 5: OASTH e- platform ................................................................................................................................................... 8 Figure 6: E-platform of Thessaloniki's -

TRAINOSE S.A. the Critical Link in the Global Supply Chains from The
Prof. Athanasios Ziliaskopoulos President & C.E.O TRAINOSE is the only rail operator in Greece operating both freight and passenger transport services As part of the infrastructure company, TRAINOSE has a continuous history of 150 years of operation At its current structure – operator – it was established as subsidiary of the infrastructure company in 2005, and as an independent Rail Service Operator in 2007 In 2012, TRAINOSE presented earnings of 1.2 million € EBITA It moves approximately 4 million tons annually which is equivalent to 150 thousand trucks with minimal environmental impact It performs 330 line services with less than 900 employees using 150 passenger, freight & shunting locomotives, and 3000 freight wagons fulfilling UIC standards Locomotive Locomotive Containers 40 & 45 ft MLW Α-450 MLW Α-504, Α-506 on wagon type 362 Athens Suburban Rail Network Scheduled-line Intermodal Cargo Services . Athens – Thessaloniki: Daily (since December 2013) . Thessaloniki – Alexandroupolis – Orestiada: Once/ twice a week . Thessaloniki – Sophia: Once/ twice a week . Thessaloniki - Skopia . Thessaloniki – Sophia - Bucharest . Thessaloniki – Skopia – Belgrade Block Train Cargo Services . For big clients (industry and freight forwarders) . Spot or regular Transit Scheduled Block Train Cargo Services . Cosco Terminal Piraeus - Central Europe Intermodal Cargo Shuttle (ICS) – The first initiative for intermodal line services in Greece Daily Athens-Thessaloniki service Trains departure/ arrival times based on market needs Transferred -

Explore South Eastern Europe by Train Buy Balkan Flexipass!!
Explore South Eastern Europe by train buy Balkan Flexipass!! Photo: Christos Zaharis-Given by Photo: Michalis Pornalis Odontotos-Club Read more about your Balkan Flexipass and organize your trip Countries in which Balkan Flexipass is valid The Balkan Flexipass is valid on the railway lines of Bulgaria (BDZ Passengers), Former Yugoslavian Republic of Macedonia (MZ-Transport), Romania (REGIO CALATORI), Greece (TRAINOSE), Serbia (SV), Montenegro (ZPCG), Bosnia & Herzegovina (ZFBH, ZRS), Turkey (TCDD TRANSPORT JSC) and on the ferries of ATTICA GROUP (Superfast Ferries & Blue Star Ferries) operating between Italy-Greece as well as in the domestic lines. In the country of residence of the pass holder, the Balkan Flexipass is available only for a direct round trip, between the departure station and the country’s border point and from the country’s border point to the destination station of the return trip in this country. How to use your Balkan Flexipass Your pass consists of the pass cover with an attached ticket, which should not be detached under any circumstances. On any travel day you may hop on and hop off as many trains as you like, but do not forget to enter them in your travel calendar and check in advance if a reservation is recommended or compulsory for the route you choose. The Pass cover protects your ticket, which is You may choose between 3, 5, 7, stapled inside. It also includes the Travel Diary, 10 and 15 days of flexible traveling which you must present together with the within an overall validity of 2 ticket to inspectors on the train.