Smart Roads Geometric Design Criteria and Capacity Estimation Based on AV and CAV Emerging Technologies
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Allegato 2.2 Formulario Piano Integrato Di Sviluppo Territoriale
REGIONE SICILIANA Dipartimento della Programmazione AVVISO PUBBLICO PER L’ATTUAZIONE TERRITORIALE DEL PO FESR 2007-2013 CON RIFERIMENTO ALL’ASSE VI “SVILUPPO URBANO SOSTENIBILE seconda fase allegato 2.2 Formulario Piano Integrato di Sviluppo Territoriale A – Informazioni Generali sul PIST Denominazione del A.1 Città a Rete Madonie Termini PIST Denominazione A.2 Madonie – Termini Imerese coalizione territoriale Alimena, Aliminusa, Blufi, Bompietro, Caccamo, Caltavuturo, Campofelice di Roccella, Castelbuono, Castellana Sicula, Cefalù, Cerda, Collesano, Gangi, Geraci Comuni componenti A.3 Siculo, Gratteri, Isnello, Lascari, Montemaggiore Belsito, Petralia Soprana, Petralia la Coalizione Sottana, Polizzi Generosa, Pollina, San Mauro Castelverde, Sciara, Termini Imerese, Scillato, Valledolmo, Sclafani Bagni Popolazione 131.384 complessiva dei A.4 comuni componenti la Coalizione (dato Istat 2008) Soggetto Giuseppe Ferrarello A.5 rappresentante Organismo Comune di Gangi responsabile del Procedimento A.6 Indirizzo Salita Municipio n. 2 - 90024 Gangi Telefono 0921644076 fax 0921644447 e-mail [email protected] A.6 Importo del €. 84.960.274 finanziamento richiesto A.7 Importo cofinanziamento % sul costo 11,75% €.11.310.050 (se presente) complessivo Allegato 2.2 formulario PIST B – Strategia e operazioni del Piano di Sviluppo Territoriale B.1 Inquadramento del Piano Integrato e coerenza con la strategia dell’Asse VI B.1.1 Inquadramento territoriale del Piano (Individuazione del territorio di riferimento, corredata da cartografie tematiche e/o ideogrammi a scala adeguata contenenti indicazioni funzionali ad individuare le funzioni urbane ed i sistemi territoriali di area vasta, includendo i relativi SLL) [massimo 4 pagine contenenti cartografie nella versione preliminare da predisporre nell’ambito della “prima finestra”] La definizione amministrativa dell’ambito territoriale del PIST Madonie-Termini, comprende 28 comuni e copre una superficie di circa 1.991,73 kmq in cui è localizzata, al dicembre 2008, una popolazione di 131.384 abitanti. -

Zonizzazione, Mete E Luoghi Di Interesse Nell'area Di Ampliamento
ENTE PARCO DELLE MADONIE i r r r T e n o COMUNI DI M a ALIMENA – BLUFI – BOMPIETRO – GANGI – LASCARI Zonizzazione, mete e luoghi di interesse nell'area di ampliamento del CARTOGRAFIA PROPOSTA DI AMPLIAMENTO DEL PARCO REGIONALE Parco delle Madonie ai comuni di Alimena, Blufi, Bompietro, Gangi e Lascari DELLE MADONIE LASCARI CEFALU' CAMPOFELICE DI ROCCELLA POLLINA TUSA ZONIZZAZIONE, METE E LUOGHI DI INTERESSE GRATTERI TERMINI IMERESE COLLESANO CASTELBUONO PETTINEO SAN MAURO CASTELVERDE SCIARA ISNELLO CERDA CASTEL DI LUCIO SCILLATO ALIMINUSA GERACI SICULO MISTRETTA SCLAFANI BAGNI CALTAVUTURO PETRALIA SOPRANA POLIZZI GENEROSA VALLEDOLMO GANGI I sindaci dei Comuni di Scala 1:25.000 BLUFI SPERLINGA BOMPIETRO Alimena CASTELLANA SICULA VALLELUNGA PRATAMENO RESUTTANO Blufi NICOSIA ALIMENA PETRALIA SOTTANA LEONFORTE Bompietro VILLALBA CAMMARATA CALASCIBETTA Gangi MARIANOPOLI VILLAROSA Il tecnico incaricato SANTA CATERINA VILLARMOSA Lascari Dott. Angelo Cantoni MUSSOMELI CALTANISSETTA ENNA NOVEMBRE SAN CATALDO 2011 Num Comune Tipo Localizzazione Num Comune Tipo Localizzazione 1 Alimena Case Case Bruno 1 Bompietro (Cugno) Case Case Alleri 2 Alimena Case Case Calabresi 2 Bompietro (Cugno) Chiese Chiesa Alleri 3 Alimena Case Case Bolfara 3 Bompietro (Cugno) Case Case Oddo 4 Alimena Siti archeol C.da Vaccarizzo 4 Bompietro (Cugno) Case Case Di Chiara 5 Alimena Siti archeol Serra Burgarito 5 Bompietro (Cugno) Case Case Tedesco 6 Alimena Siti archeol Cozzo Celsa 6 Bompietro (Cugno) Case Case Pollara 7 Alimena Siti archeol Balza Areddula 7 Bompietro (Cugno) -

Citta' Di Bompietro
CITTA’ DI BOMPIETRO (Provincia di Palermo) PIANO DI EMERGENZA PER IL RISCHIO SISMICO E VALUTAZIONE SPEDITIVA DEL RISCHIO IDROGEOLOGICO E IDRAULICO Adottato con Determina Sindacale n°_____ del ______________ Edizione Dicembre 2014 INDICE RISCHIO SISMICO PREMESSA A PARTE GENERALE A.1 DATI TERRITORIALI DI BASE PREMESSA A.1.1 - Il Territorio A.1.2 - La Popolazione A.1.3 - Geomorfologia A.1.4 - Geologia A.2 DATI TERRITORIALE DI DETTAGLIO A.2.1 - Rete delle infrastrutture di trasporto A.2.2 - Attività produttive A.2.2.1 - Attività industriali, artigianali e commerciali A.2.2.2 – Attività agricole e zootecniche A.2.3 - Edifici da censire nel piano comunale di P.C. A.2.3.1 – Edifici strategici A.2.3.2 – Edifici tattici A.2.3.3 – Edifici sensibili A.2.4 - Risorse Pubbliche e Private A.2.4.1 – Elenco materiali di proprietà comunale A.2.4.2 – Elenco mezzi di proprietà comunale A.2.4.3 – Elenco strutture ricettive di proprietà comunale A.2.4.4 – Strutture sanitarie A.2.4.5 – Elenco strutture ricettive private A.2.4.6 – Elenco risorse private per categorie A.2.4.7 – Elenco mezzi di proprietà privata A.2.5 - Associazioni di Volontariato A.2.5.1 – Elenco associazioni di volontariato presenti nel territorio madonita A.2.6 - FF. OO. – locali e VV. FF. A.2.7 - Servizi Essenziali A.2.7.1 Servizio di Radio Telecomunicazione e Stampa A.2.7.2 Servizio di appresamento e distribuzione idrica, imp. di depurazione A.2.7.3 Servizio di distribuzione dell’energia elettrica A.2.7.4 Servizio di illuminazione pubblica A.2.7.5 Servizio di distribuzione gas metano A.2.7.6 -

Scianna 2011 Amm Ass
Comune di Lascari (Pr.Palermo)- Estratto determinazione del Responsabile dell’Area Amministrativa - Socio Assistenziale. Anno 2011 N. Data ESTRATTO DETERMINAZIONI 1 04/01/2011 OGGETTO: Liquidazione contributi economici attività L.P.U. – Mese di Dicembre 2010 2 04/01/2011 OGGETTO: Liquidazione contributi economici ad utenti con disagio psico- fisico attività L.P.U. – Mese di dicembre 2010. 3 11/01/2011 OGGETTO: Liquidazione contributo economico attività L.P.U. Mese di Dicembre 2010. 4 11/01/2011 OGGETTO: Modifica determina n.356 del 21.12.2010ad oggetto: “Fornitura arredo per l’aula Consiliare e per l’ufficio di Presidenza . Determinazione a contrarre ed attivare dalla relativa procedura di affidamento, mediante cottimo fiduciario , ai sensi dell’ art. 15, comma 1 del vigente regolamento Comunale per l’esecuzione di lavori e l’acquisizione di beni e servizi in economia.- prenotazione di impegno di spesa per l’importo complessivo di € 8.300,00 oltre IVA al 20% 5 11/01/2011 OGGETTO: Fornitura materiale didattico da donare, in occasione delle festività natalizie, alla Scuola dell’Infanzia di Lascari – Liquidazione fatt. 4/152 del 17.12.2010 Alla Ditta Pietro Vittorietti Soc. Coop.di Palermo per l’importo complessivo di € 524,09 IVA inclusa . 6 13/01/2011 OGGETTO: Servizio di trasporto scolastico per gli alunni pendolari da Lascari a Cerda e viceversa per i mesi di novembre e dicembre 2010.- Liquidazione fattura nn. 07 del 30.11.2010 e del 24.12.2010 emesse dalla ditta Giambrone Calogero di Campofelice di Roccella (PA) dell’ importo complessivo di € 1.400,00 IVA inclusa. -
17/08/2020 Graduatoria Definitiva
Società Consortile a responsabilità limitata per la gestione integrata dei servizi di igiene ambientale – P.IVA 06339050822 - Sede: Via Leone XIII n. 32 – Iscritta alla Camera di Commercio di Palermo ed Enna: R.I. 06339050822 - REA 314696 Iscritta all’Abo Nazionale Gestori Ambientali n. PA/012503 90020 Castellana Sicula (PA) - tel. 0921642299/702 – f ax 0921562782 Indirizzo PEC: [email protected] Prot. n. 2445 del 17/08/2020 GRADUATORIA DEFINITIVA per il reperimento di personale da impiegare a tempo determinato nelle mansioni di "operatore ecologico" (addetto alle mansioni di raccolta e spazzamento) per far fronte ad esigenze immediate e straordinarie. AVVISO PUBBLICO Prot. 2238 del 20/07/2020 n. n° COMUNE DI MESE NON SERVIZIO ATTESTATI DI FIGLI DATA PUNTEGGIO NOME COGNOME LAVORATI PRESTATO P.A. FORMAZIONE FISCALMENTE Progr. Prot. RESIDENZA ULTIMI 5 ANNI 0,2 punti mese 5 punti attestato A CARICO DI NASCITA CONS. 1 2403 BARBERI GIUSEPPE GANGI 3 57,00 12 2,40 2 10,00 0 - 06/03/1987 69,40 2 2340 SCHIMMENTI MARCO POLIZZI GENEROSA 3 57,00 - 0,00 2 10,00 0 - 25/09/1992 67,00 3 2522 CALATO SALVATORE SEBASTIANO SCLAFANI BAGNI 2 58,00 33 6,60 0 0,00 1 0,50 29/03/1961 65,10 4 2381 BARBERI SANDRO MARIA GANGI 3 57,00 12 2,40 1 5,00 1 0,50 02/03/1988 64,90 5 2417 CORRADINO GIUSEPPE GERACI SICULO 0 60,00 24 4,80 0 0,00 0 - 18/09/1995 64,80 6 2582 ALISEO CONCETTA ALIMENA 0 60,00 12 2,40 0 0,00 2 1,00 14/06/1995 63,40 7 2358 PORCELLO GIUSEPPE BOMPIETRO 0 60,00 12 2,40 0 0,00 2 1,00 08/01/1991 63,40 8 2660 DI CARA VANESSA BOMPIETRO 0 60,00 12 2,40 0 0,00 2 1,00 30/03/1990 63,40 9 2659 MONTEONOFRIO GIOVANNA S. -

Registro Pubblico Degli Assistenti Familiari Dei
REGISTRO PUBBLICO DEGLI ASSISTENTI FAMILIARI DEI DISTRETTI SOCIO SANITARI D 35 e D 37 Allegato 1 ATTUALE DATA DISPONIBILITA' AUTOMUNIT DISPONIBILITA' PREFERENZA SEDE COGNOME NOME LUOGO NASCITA REQUISITI POSSEDUTI POSIZIONE NOTE NASCITA LAVORATIVA O TEMPO DI LAVORO DI LAVORO LAVORATIVA Abbruscato Nunzia 30/10/1969 Caccamo Corso di Formazione Professionale Immediata Disoccupato si mattina Termini Imerese 1 Scimè Caccamo, Cerda, Montemaggiore Belsito, Abruscato Giuseppe 27/06/1987 Termini Imerese Corso di Formazione Professionale Immediata Disoccupato si non ha preferenze 2 Sciara, Termini Imerese, Trabia Termini Imerese, Albanese Maria 22/08/1971 Termini Imerese Corso di Formazione Professionale Immediata Disoccupato si non ha preferenze 3 Trabia Caccamo, Cerda, 4 Alesi Nicasia 13/03/1964 Ciminna Corso di Formazione Professionale Immediata Disoccupato si non ha preferenze Sciara, Termini Imerese, Trabia Caccamo, Termini Alesi Rosaria 28/07/1973 Ciminna Corso di Formazione Professionale Immediata Disoccupato si mattina, pomeriggio 5 Imerese, Trabia Caccamo, Cerda, Alessandro Antonietta 26/01/1963 Termini Imerese Corso di Formazione Professionale Immediata Disoccupato non ha preferenze Sciara, Termini 6 Indricchio Imerese, Trabia 7 Alessi Marianna 25/04/1980 Petralia Sottana Corso di Formazione Professionale Occupato no pomeriggio Petralia Soprana Caccamo, Termini Amodeo Graziella 24/07/1983 Termini Imerese Corso di Formazione Professionale Immediata Occupato si non ha preferenze 8 Imerese, Trabia Caccamo, Termini Asterino Maria Giuliana -

REGISTRO PUBBLICO DEGLI ASSISTENTI FAMILIARI DEI DISTRETTI SOCIO SANITARI D 35 E D 37 Allegato 1 ATTUALE DATA RECAP
REGISTRO PUBBLICO DEGLI ASSISTENTI FAMILIARI DEI DISTRETTI SOCIO SANITARI D 35 e D 37 Allegato 1 ATTUALE DATA RECAP. DISPONIBILITA' AUTOMUNIT DISPONIBILITA' PREFERENZA SEDE COGNOME NOME LUOGO NASCITA INDIRIZZO E-MAIL REQUISITI POSSEDUTI POSIZIONE NOTE NASCITA TELEF. LAVORATIVA O TEMPO DI LAVORO DI LAVORO LAVORATIVA Abbruscato Nunzia 30/10/1969 Caccamo 328/6527547 Corso di Formazione Professionale Immediata Disoccupato si mattina Termini Imerese 1 Scimè Caccamo, Cerda, Montemaggiore Belsito, Abruscato Giuseppe 27/06/1987 Termini Imerese 340/4176957 [email protected] Corso di Formazione Professionale Immediata Disoccupato si non ha preferenze 2 Sciara, Termini Imerese, Trabia Termini Imerese, Albanese Maria 22/08/1971 Termini Imerese 328/4651139 [email protected] Corso di Formazione Professionale Immediata Disoccupato si non ha preferenze 3 Trabia Caccamo, Cerda, 4 Alesi Nicasia 13/03/1964 Ciminna 320/8735765 [email protected] Corso di Formazione Professionale Immediata Disoccupato si non ha preferenze Sciara, Termini Imerese, Trabia Caccamo, Termini Alesi Rosaria 28/07/1973 Ciminna 328/2225753 [email protected] Corso di Formazione Professionale Immediata Disoccupato si mattina, pomeriggio 5 Imerese, Trabia Caccamo, Cerda, Alessandro Antonietta 26/01/1963 Termini Imerese 349/5881631 Corso di Formazione Professionale Immediata Disoccupato non ha preferenze Sciara, Termini 6 Indricchio Imerese, Trabia 7 Alessi Marianna 25/04/1980 Petralia Sottana 338/1400156 [email protected] Corso di Formazione Professionale Occupato -
Comune Di Cerda
COMUNE DI CERDA PROVINCIA DI PALERMO RELAZIONE TECNICA RELATIVA AL PIANO DI RAZZIONALIZZAZIONE DELLE SOCIETA’ PARTECIPATE EX ART. 1, COMMA 612, L. 190/2014 SOCIETA’ ECOLOGIA E AMBIENTE SPA C.F. 05160520820 in liquidazione ha quale scopo sociale la gestione unitaria ed integrata dei rifiuti secondo criteri di economicità, efficienza ed efficacia nell‟ambito territoriale ottimale in aderenza alle Direttive europee ed alle vigenti disposizioni nazionali e ragionali in materia di rifiuti (art. 4 Statuto). La società a seguito della Legge Regionale n. 9/2010 è stata posta in liquidazione e consequenzialmente è tenuta, fino al definitivo avvio della SRR, a garantire la continuità dell‟espletamento del servizio di raccolta rifiuti. Ragione Sociale: ECOLOGIA E AMBIENTE SPA in liquidazione C.F. 05160520820 Percentuale di partecipazione 4,584% Durata fino al 2030 Onere complessivo a qualsiasi titolo gravante per l'anno sul bilancio dell'amm.ne (da bilancio 2014) relativo al servizio di raccolta di RSU € 789.990,86 compresa iva Numero addetti al servizio 31/12/2015 n. 210 (di cui n. 7 impiegati presso il comune di Cerda) Altri Soci (Enti) partecipanti Ex Provincia Regionale di Palermo ed i comuni di: Aliminusa, Caccamo, Campofelice di Roccella, Castelbuono, Cefalù, Collesano, Gratteri, Isnello, Lascari, Montemaggiore Belsito, Pollina, Sciara, Scillato, Termini Imerese e Trabia. Rappresentanti dell'amm.ne negli organi di governo e relativo trattamento economico Numero Carica Durata Trattamento economico // // // // La Società dal 2011 non dispone più di un Consiglio di Amministrazione bensì di un Collegio di Liquidatori composto da n. 3 soggetti e dal Settembre 2013 di un Commissario Straordinario per la gestione. -

Palermo Enna Catania Messina Agrigento Sirac Ragusa Caltanissetta
! INQUADRAMENTO LEGENDA MESSINA ! ! ! ! ! ! ! ! ± ! ! ! ! ! ! ! ! ! ! & CIMINNA ! Confine comunale BLUFI SPERLINGA PALERMO ! Stazioni Elettriche interessate da progetto Aree di cantiere base GANGI 7 NISSORIA 4 S" Ubicazione palificazione elettrodotto 6 ENNA 5 3 Nuove linee da realizzare CALTANISSETTA Elettrodotto aereo a 380 kV in doppia terna 2 NICOSIA AGRIGENTO INFRASTRUTTURE - TRASPORTO CATANIA Autostrade ! Strade IA L 1 A R T E Rete ferroviaria P - E .N SIRACUSA S D A CHIARAMONTE GULFI ") Stazione ferroviaria T & T E S IS BOMPIETRO N A T L A INFRASTRUTTURE TECNICHE C RAGUSA XY XY XY XY XY XY XY Metanodotto ENNA Elettrodotti Linea aerea 380 kV RTN Linea aerea 220 kV RTN Linea aerea 150 kV RTN PETRALIA SOTTANA Linea aerea 132 kV RTN SORIA TTI - NIS Linea aerea non RTN NICOLE Stazioni ALIMENA &, Stazione 380kV RTN 0 1 &, Stazione 220kV RTN 2 2 2 2 2 2 ! ! &, 2 S LEONFORTE S 9 Stazione 150kV RTN 3 1 2 S! 2 2 ! &, S Stazione 132kV RTN S! 8 1 2 ! S! Stazione non RTN o Cabina Primaria 4 2 7 2 É 1 3 2 5 ! 6 4 2 S! S 1 1 & Cabina Utente 2 5 1 2 2 2 1 2 1 ! ! S 2 ! S 2 ! S 1 S ! ! 1 Centrali S S 2 0 1 9 ! 2 S ¢ 6 0 )" 2 Centrale Idroelettrica ! 2 8 2 S 0 ! ! S 2 7 S 0 CALASCIBETTA "¢ ! 6 ) 2 Centrale Eolica S 0 2 7 ! S 5 2 ! 0 ."" 2 4 "" S 2 ) 8 0 Centrale Termoelettrica 2 ! ! 2 2 S S ! S S! )"¢ Centrale Geotermoelettrica 9 2 3 2 0 2 ! S S! 0 3 2 2 S! 0 2 1 0 0 3 ! 0 S 9 2 9 1 2 2 9 1 3 4 ! ! 9 2 1 8 9 S ! S ! S 9 ! 1 S 9 7 1 S 1 3 ! ! 9 6 1 9 2 S S ! 5 2 S 9 8 3 1 ! 1 9 2 ! S 3 1 ! S ! ! 1 S 2 S 7 S 3 3 ! ! 0 CALTANISSETT 9 ! S A S.NE - NICOLETTI S ! 9 3 2 4 S S 8 5 1 8 2 6 3 ! 1 3 ! 8 S 3 2 S 2 ! 1 ! 7 2 S S 8 ! ! ! ! S 1 S S S ! S 6 8 1 S! 5 8 1 NICOLETTI S! ASSORO ! 4 8 1 Cantiere Base 3 S! 3 Cantiere Base 3 8 1 2 S! 8 1 S! 1 8 0 1 8 VILLAROSA ! 1 9 ! S 7 ! S 1 8 S ! F S 7 A 1 N 7 N 7 E ! S - 1 6 I T ! 7 T S E 1 5 L 7 O ! C 1 I S 4 N 7 SANTA CATERINA VILLARMOSA S! 1 S! 73 É ENNA FS 1 ! & S 2 7 1 ! 1 S 7 1 ! 0 S 7 1 S! CALTANISSETTA S! S! I N O I S I V E ENNA R 00 prima emissione GEOTECH L.MOIANA N.RIVABENE dicembre 2011 SRI-CRE-ASA SRI-CRE-ASA N. -

Cave Attive 2017 Per Sito
ELENCO CAVE ATTIVE AL 31/12/2017 - PALERMO/TRAPANI N° Esercente Comune Contrada Prov. Materiale 1 CA.VE s.r:l. CASTRONOVO DI SICILIA TROCCOLA PA Calcare PUZZILLO COSTRUZIONI 2 CASTRONOVO DI SICILIA MADONESI PA Calcare S.p.A. 3 RUVUTUSO LEONARDO PETRALIA SOPRANA BONASCICCHI PA Sabbia 4 CAVA PIANETTO s.r.l. S.CRISTINA GELA PIANETTO PA Calcare PIZZO DEL 5 MATRANGA LUCIANO S.CRISTINA GELA PA Calcare VENTO 6 ARREDIL 2 s.r.l. MONREALE SPIRDATA PA Marmo 7 MILAZZO FRANCESCA VENTIMIGLIA DI SICILIA TRAVERSA PA Argilla 8 TOSTO GIOACCHINO CASTRONOVO DI SICILIA Riena PA Calcare F.LLI CALAMAIO di Portella S. 9 Calamaio Ettore & C. CASTRONOVO DI SICILIA PA Calcare s.n.c. Francesco 10 S.E.L.M.I. s.r.l. MONREALE MIRTO PA Calcare 11 LO BIANCO GIUSEPPE CACCAMO MUXOTTO PA Gesso GURGO 12 IN.CA. S.r.l. CALTAVUTURO PA Calcare S.ANTONIO INDUSTRIA LAPIDEA 13 PRIZZI PIETRE CADUTE PA Calcare PRIZZESE S.r.l. 14 C.I.M.A. s.r.l. VILLAFRATI STALLONE PA Marmo 15 SALA S.r.l. ALTOFONTE SALVINA PA Calcare 16 VALLE RENA S.r.l. ALTOFONTE VALLE RENA PA Calcare 17 BUTTITTA GIUSEPPE BOLOGNETTA CASACHELLA PA Calcare 18 ITALCEMENTI S.p.A. CARINI MANOSTALLA PA Argilla 19 MEDI.TOUR S.R.L. CARINI SARACENO PA Calcare CAVA GIARDINELLO 20 TERMINI IMERESE GIARDINELLO PA Calcare S.r.l. 21 ITALCEMENTI S.p.A. TORRETTA PIAN DELL'AIA PA Calcare 22 S.E.S.A. s.r.l. PALERMO SERAFINELLO PA Calcare F.LLI POLIZZI s.n.c. -

Graduatoria Definitiva
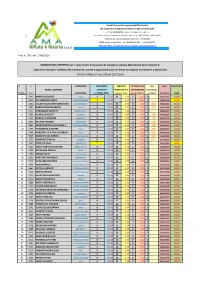
Società Consortile a responsabilità limitata per la gestione integrata dei servizi di igiene ambientale – P.IVA 06339050822 - Sede: Via Leone XIII n. 32 – Iscritta alla Camera di Commercio di Palermo ed Enna: R.I. 06339050822 - REA 314696 Iscritta all’Abo Nazionale Gestori Ambientali n. PA/012503 90020 Castellana Sicula (PA) - tel. 0921642299/702 – f ax 0921562782 Indirizzo PEC: [email protected] Prot. n. 3177 del 07/08/2019 GRADUATORIA DEFINITIVA Avviso pubblico del 03/07/2019 Procedura selettiva per il reperimento di personale da impiegare a tempo determinato nelle mansioni di operatore ecologico (addetto alla raccolta e spazzamento) per fare fronte ad esigenze immediate e straordinarie. NumeroPUNTEGGIO n° COMUNE DI MESI NON LAVORATI SERVIZIO PRESTATO ATTESTATI DI DATA FIGLI NOME COGNOME ULTIMI 5 ANNI P.A. ULTIMI 5 ANNI FORMAZIONE CONVIVENTI Ordine CONS. Istanza RESIDENZA 1 punti per mese 0,20 punto per mese 5 punti per attestato NASCITA 1 67,60 2896 DI FIORE DOMENICO POLIZZI GENEROSA 1 3 57,00 0,2 3 0,60 5 2 10,00 17/12/1978 2 2 65,00 2913 VINCI FRANCESCO CASTELLANA SICULA 1 0 60,00 0,2 - 0,00 5 1 5,00 20/01/1966 3 64,70 2812 SERIO KATIUSCIA BOMPIETRO 1 0,3 59,70 0,2 - 0,00 5 1 5,00 27/02/1982 4 62,60 2797 BONGIORNO TERESA GIUSEPPINA PETRALIA SOTTANA 1 3 57,00 0,2 3 0,60 5 1 5,00 20/07/1985 5 62,40 2985 MERLINA LUCIANA GIOVANNA CASTELLANA SICULA 1 0 60,00 0,2 12 2,40 5 0 0,00 24/06/1992 2 6 62,40 2927 SABATINO FABRIZIO PETRALIA SOTTANA 1 0 60,00 0,2 12 2,40 5 0 0,00 03/04/1991 1 7 62,40 2938 VICARI SIMONE ALIA -

Regione Siciliana Assessorato Regionale Dell'agricoltura, Dello
Regione Siciliana Assessorato regionale dell’agricoltura, dello sviluppo rurale e della pesca mediterranea Dipartimento regionale dell’agricoltura Programma di Sviluppo Rurale 2014/2020 Decisione CE C(2015)8403 del 24 novembre 2015 che approva il PSR Sicilia 2014/2020 Sottomisura 19.2 – “Sostegno all’esecuzione degli interventi nell’ambito della strategia di sviluppo locale di tipo partecipativo” Sottomisura 19.4 – “Sostegno per i costi di gestione e animazione” Strategia di Sviluppo Locale di tipo partecipativo “COMUNITÀ RURALI RESILIENTI” del Gruppo di Azione Locale “ISC MADONIE” Castellana Sicula, 03 ottobre 2016 Il legale rappresentante Bartolo Vienna 1 INDICE 1 DATI IDENTIFICATIVI DEL GAL .......................................................................................................... 3 1.1 Anagrafica del GAL ................................................................................................................................ 3 1.2 Altre informazioni sul GAL .................................................................................................................... 4 1.3 Composizione del partenariato ................................................................................................................ 6 1.4 Funzionamento del GAL ....................................................................................................................... 36 1.5 Precedenti esperienze di gestione/attuazione di progetti comunitari ..................................................... 46 2. DESCRIZIONE DEL