Universit`A Degli Studi Di Padova Preliminary
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Soaring Magazine Index for 2000 to 2009/2000To2009 Organized by Subject
Soaring Magazine Index for 2000 to 2009/2000to2009 organized by subject The contents have all been re-entered by hand, so thereare going to be typos and confusion between author and subject, etc... Please send along any corrections and suggestions for improvement. 1-26 Randy Rothe, Bullseye! - The 2002 1-26 Championships,December,2002, page 9 75th Anniversary of the Soaring Society of America SOARING - The Takeoff(1937 Reprint),May,2007, page 2 A, B, C Chuck Coyne, May,2009, page 4 Academy Air Force Richard Fucci, Air Force Academy Visit,May,2008, page 5 Accident Accident Report,August, 2000, page 8 Gavin Wills, Norm’sLast Flight,May,2002, page 26 Activity John Good, Soaring Participation Worldwide,July,2001, page 34 AeroTow Pete Guy, Crosswind LaunchinFredericksburg, Texas,April, 2009, pages "30, 31" Safety Peter Stauble, AeroTow Emergencies,September,2001, page 3 Aerobatics Chris Woods, Winter Haven,January,2003, cover Jason Stephens, WA G 2009 - A Glider Pilot’sPerspective,October,2009, page 40 Aerodynamics Joe Salz, Angle of Attack,September,2005, page 3 Deturbulator Jim Hendrix, Old Wineskins,April, 2009, page 5 Deturbulators Richard H. Johnson, Aflight Test Evaluation of the Sinha Wing Performance Enhancing Detur- bulators,May,2007, page 35 Flight Tests Dick Johnson and Dean Carswell, AFlight Test Evaluation of the Genesis 2 Sailplane,March, 2000, page 14 Richard H. Johnson and Dean Carswell, AFlight Test Evaluation of the 304 CZ Sailplane,July, 2000, page 30 Richard Johnson, AFlight Test Evaluation of the LAK-17A Racing Class Sailplane,March, 2001, page 25 Dick Johnson, AFlight Test Evaluation of the LAK-17A Racing Class Sailplane,July,2001, page 22 Chad Moore, Performance Testing the Russia AC-4c,September,2001, page 28 Richard H. -

Ff 89/6 Copy
$3 vol libre • free flight 6/89 Dec - Jan POTPOURRI SAC was informed by Sport Canada on the 10th of July that we are not eligible for funding for 1989-90 and until further notice. Thus we are now totally on our own. The average yearly grant from 1979 to 1988 in 1989 dollars was $14,000, or $16 per person. Perhaps it’s a good thing as planning in an atmosphere of doubt is not conducive to good health and efficient use of funds. The cutback was not unexpected and steps were taken early on to ease the effects of this loss of revenue. Imaginative planning in our small store and a good response from our members through the use of the “Soaring Stuff” inserts resulted in in- creased sales. We will also receive higher than projected invest- ment income essentially due to careful cash management and short-term interest rates, which have remained higher for longer than generally expected. In addition, a small gain in projected receipts from an unexpected increase in membership – now at 1423 – which is the first time since 1982 that we have passed 1400. Total expenditures should come in well below budget projection, primarily as a result of scaling back meetings and travel expenditures. On balance it seems fair to say that a combination of some tight fistedness on the expenditure side and a bit of luck on the revenue side will leave SAC in a financially stronger position than was expected at the beginning of the season, despite the cutting off of govern- ment funding. -

November 2020
November 2020 e- Water Landing, Lake Tahoe, 2020 Presidents Message Editorial Safety Lessons from 2020 PASCO OGN Project Update 2020 PASCO Scholarship Update 2020 PASCO Flight Awards 2020 1 Statement of Purpose The purpose of this Corporation shall be to initiate, sponsor, promote, and carry out plans, policies, and activities that will further the growth and development of the soaring movement in Region 11 of the Soaring Society of America. Activities will be targeted at increasing the number of soaring pilots in the region in addition to the development of soaring pilots to promote safety of flight, training in the physiology of flight, cross country and high altitude soaring and the development of competition pilots and contest personnel at the local, regional, national and international level. Current dues are $25 annually from the month after receipt of payment. PASCO is a 501c(3) not for profit corporation and contributions are tax deductible. Consider PASCO in your charitable giving plans this year! WORLD WIDE WEB ADDRESSES - REGION 11 Soaring Society of America http://www.ssa.org Pacific Soaring Council http://www.pacificsoaring.org Air Sailing Inc. http://www.airsailing.org Bay Area Soaring Associates http://www.flybasa.org Central California Soaring Club http://www.soaravenal.com Las Vegas Valley Soaring Association http://www.lvvsa.org Minden Soaring Club http://www.mindensoaringclub.com/int2/ Northern California Soaring Assoc. http://www.norcalsoaring.org/ Silverado Soaring, Inc. http://www.silveradosoaring.org/ Hollister Soaring Center https://hollistersoaringcenter.com/ SoaringNV http://www.soaringnv.com/ Williams Soaring Center http://www.williamssoaring.com/ Valley Soaring Association http://www.valleysoaring.net/ Presidents Message It has been a challenging year for everyone for many reasons and, due to the ongoing health concerns, I am sorry to report that there will not be a PASCO safety seminar / awards banquet this winter. -

State of the Art of Piloted Electric Airplanes, NASA's Centennial Challenge Data and Fundamental Design Implications
Dissertations and Theses Fall 2011 State of the Art of Piloted Electric Airplanes, NASA's Centennial Challenge Data and Fundamental Design Implications Lori Anne Costello Embry-Riddle Aeronautical University - Daytona Beach Follow this and additional works at: https://commons.erau.edu/edt Part of the Aerospace Engineering Commons Scholarly Commons Citation Costello, Lori Anne, "State of the Art of Piloted Electric Airplanes, NASA's Centennial Challenge Data and Fundamental Design Implications" (2011). Dissertations and Theses. 37. https://commons.erau.edu/edt/37 This Thesis - Open Access is brought to you for free and open access by Scholarly Commons. It has been accepted for inclusion in Dissertations and Theses by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. STATE OF THE ART OF PILOTED ELECTRIC AIRPLANES, NASA’S CENTENNIAL CHALLENGE DATA AND FUNDAMENTAL DESIGN IMPLICATIONS by Lori Anne Costello A Thesis Submitted to the Graduate Studies Office in Partial Fulfillment of the Requirements for the Degree of Master of Science in Aerospace Engineering Embry-Riddle Aeronautical University Daytona Beach, Florida Fall 2011 1 Copyright by Lori Anne Costello 2011 All Rights Reserved 2 ACKNOWLEDGEMENTS This thesis is the culmination of two years of work on the Green Flight Challenge Eco-Eagle. The Eco- Eagle and this thesis would not have been possible without countless help and inspiration from friends and family. I would like to thank Dr. Anderson for giving me the opportunity to participate in Embry-Riddle’s Green Flight Challenge Team and for supporting me and the Eco-Eagle project. Without his guidance I would not have this paper and understood as much as I now do about electric airplanes. -

Slingsby T61F Venture T MK2 Motor Glider, G-BUGV
Slingsby T61F Venture T MK2 motor glider, G-BUGV AAIB Bulletin No: 2/99 Ref: EW/G98/11/10 Category: 1.3 Aircraft Type and Registration: Slingsby T61F Venture T MK2 motor glider, G-BUGV No & Type of Engines: 1 Rollason RS MK 2 piston engine Year of Manufacture: 1978 Date & Time (UTC): 21 November 1998 at 1035 hrs Location: Enstone Airport, Oxon Type of Flight: Private (Training) Persons on Board: Crew - 2 - Passengers - None Injuries: Crew - None - Passengers - N/A Nature of Damage: Damage to the aircraft's propeller Commander's Licence: Basic Commercial Pilot's Licence with Instrument Rating Commander's Age: 27 years Commander's Flying Experience: 604 hours (of which 102 were on type) Last 90 days - 124 hours Last 28 days - 36 hours Information Source: Aircraft Accident Report Form submitted by the pilot Before permitting a recently qualified member of the flying club to fly solo in crosswind conditions, the aircraft's commander decided to fly several circuits with him until he was satisfied with his ability to cope with the conditions. As the conditions were conducive to the formation of carburettor icing, with a temperature of +5°C and a dew point of +1.6°C, particular attention was paid to the use of carburettor heat during the run-up and immediately prior to take off. The engine reportedly performed normally and carburettor heat was used during the pre-landing downwind checks and again on base leg, with its selection maintained until after the glide approach and landing, in accordance with the normal operating procedure for this aircraft. -

Glider Handbook, Chapter 2: Components and Systems
Chapter 2 Components and Systems Introduction Although gliders come in an array of shapes and sizes, the basic design features of most gliders are fundamentally the same. All gliders conform to the aerodynamic principles that make flight possible. When air flows over the wings of a glider, the wings produce a force called lift that allows the aircraft to stay aloft. Glider wings are designed to produce maximum lift with minimum drag. 2-1 Glider Design With each generation of new materials and development and improvements in aerodynamics, the performance of gliders The earlier gliders were made mainly of wood with metal has increased. One measure of performance is glide ratio. A fastenings, stays, and control cables. Subsequent designs glide ratio of 30:1 means that in smooth air a glider can travel led to a fuselage made of fabric-covered steel tubing forward 30 feet while only losing 1 foot of altitude. Glide glued to wood and fabric wings for lightness and strength. ratio is discussed further in Chapter 5, Glider Performance. New materials, such as carbon fiber, fiberglass, glass reinforced plastic (GRP), and Kevlar® are now being used Due to the critical role that aerodynamic efficiency plays in to developed stronger and lighter gliders. Modern gliders the performance of a glider, gliders often have aerodynamic are usually designed by computer-aided software to increase features seldom found in other aircraft. The wings of a modern performance. The first glider to use fiberglass extensively racing glider have a specially designed low-drag laminar flow was the Akaflieg Stuttgart FS-24 Phönix, which first flew airfoil. -
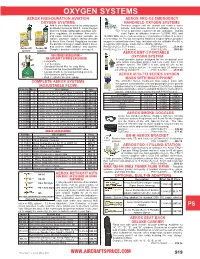
Oxygen Systems
OXYGEN SYSTEMS AEROX HIGH-DURATION AVIATION AEROX PRO-O2 EMERGENCY OXYGEN SYSTEMS HANDHELD OXYGEN SYSTEMS Add to your flying comfort by using oxygen Provides oxygen until the aircraft can reach a lower at altitudes as low as 5000 ft. Aerox Oxygen altitude. And because Pro-O2 is refillable, there is no CM Systems include lightweight aluminum cyl in- need to purchase replacement O2 cartridges. During ders, regulators, all hardware, flow meter, short flights at altitudes between 12,500ft. MSL and and nasal cannulas (masks available as 14,000ft. MSL where maneuvering over mountains or turbulent weather option). Oxysaver oxygen saving cannulas is necessary, the Pro-O2 emergency handheld oxygen system provides & Aerox Flow Control Regulators increase oxygen to extend these brief legs. Included with the refillable Pro-O2 is WP the duration of oxygen supply about 4 times, a regulator with gauge, mask and a refillable cylinder. and prevent nasal irritation and dryness. Pro-O2-2 (2 Cu. Ft./1 mask)........................P/N 13-02735 .........$328.00 Aerox 2D Aerox 4M Complete brochure available on request. Pro-O2-4 (2 Cu. Ft./2 masks) ......................P/N 13-02736 .........$360.00 system system AEROX EMT-3 PORTABLE 500 SERIES REGULATOR – AN AIRCRAFT SPRUCE EXCLUSIVE! OXYGEN SYSTEM ME A small portable system designed for the occasional user • Low profile who wants something smaller and less costly than a full • 1, 2, & 4 place portable system. The EMT-3 is also ideal for use as an • Standard Aircraft filler for easy filling emergency oxygen system. The system lasts 25 minutes at • Convenient top mounted ON/OFF valve 2.5 LPM @ 25,000 FT. -

Model Builder February 1982
S >580„0Ζ8>Λ volume 12, number 121 ■Sw L to R: Tony Bonetti-National Champion, Steve Helms and Donald Weitz, Jr. THE FINISHING TOUCH Tony, Steve, and Don didn't take 1st, 2nd, and 5th places at the 1981 Nationals by accident. Precision aerobatics demand the å most reliable and highest performance equipment * available for the best possible finish. The same off-the-shelf high quality components they used are J ( 1 available from your local Circus Hobbies dealerJ Whether you fly for sport or competition, these products are designed to help you become the best I pilot you could be. So, if you are serious about ^ your flying insist on JR Radios, Webra Engines wSSSSSi and IM Accessories, the Finishing Touch for every winner^ JR, Webra, and IM are imported exclusively by Circus Hobbies Send $1.00 for complete product catalog. New address: Circus Hobbies Incorporated, 3132 S. Highland Dr., Subsidiary of Circus Circus Hotels Las Vegas, Nevada 89109 0 1980 ASSOCIATED ELECTRICS Speclol soft racing compound front fires. (mounted/#3654-S) I (it fiberglass Aircraft alloy, 8-32 tlatheai screws. Vi" (#3324) and V /i" (#3325) avoiloble. Weightsaver fiberglass chassis. Precision die-cut, drilled and countersunk. (#3312) It takes a close look at a Factory car to see all of the tricks the Team has developed. Some, like precision ball bearings, (#3655/front and # 2 2 2 2 /re a r) you can't see at all. But what a difference it makes. Special, light weight fiberglass chassis plates. Featherweight alloy Associated captures the sleek flathead chassis screws. -

Kitplanes 2020 02.Pdf
2020 ENGINE BUYER’S GUIDE ® KITPLANES February Punch? a Findlay 2020What’s • KnowLong-EZs About Didn’t You What Into an Overhaul • Turns Inspection an Engine Guide • How Buyer’s Engine 2020: Our Massive Vroom Tommy Meyer YOUR ENGINE CHOICES Makes One for Dad We List All the Popular FEBRUARY 2020 Engines for Homebuilts BELVOIR PUBLICATIONS BELVOIR TRICYCLE GEAR In the Shop: It’s All About the Attitude • ELT Gotchas • Glareshield Tips and Tricks THE SUBSONEX CONTINUES • IRAN vs Overhaul Tackling Wiring, Avionics and Plumbing www.kitplanes.com ENJOY THE VIEW. EVERY TIME YOU FLY. G3X TOUCH™ SERIES FOR EXPERIMENTAL AIRCRAFT TOUCHSCREEN, INTEGRATION WITH ADS-B TARGETTREND™ SUPPORTS ANY MODERN AUTOPILOT COMPLETE KNOB AND COMMS, TRANSPONDER, TRAFFIC AND COMBINATION OF 10.6” WITH ACCLAIMED SYSTEM STARTING BUTTON CONTROL IFR GPS AND MORE SIRIUSXM® WEATHER* AND 7” DISPLAYS, UP TO 4 PERFORMANCE AT $4,495** FOR MORE DETAILS, VISIT GARMIN.COM/EXPERIMENTAL *Additional equipment required. **MSRP: 7” display and fl ight sensors. © 2019 Garmin Ltd. or its subsidiaries. 19-MCJT19630 G3X ENJOY_THE_VIEW Ad-7.875x10.5-Kitplanes.indd 1 3/12/19 8:45 AM FebruaryCONTENTS 2020 | Volume 37, Number 2 2019 Engine Buyer’s Guide 16 YOUR AERO MOTIVATION IS HERE! By Tom Wilson. • Horizontally opposed four-stroke gasoline • Inline and vee four-stroke • Radial and rotary (traditional) • Rotary (Wankel) • Compression ignition (diesel and Jet A) • Volkswagen • Jets and turboprops • Corvair • Two-stroke 16 • Electric 18 NEW VS. USED: Understanding the difference between factory remanufactured, field overhauled, top overhauled, and just plain used. By Tom Wilson. Builder Spotlight 4 THE BIG TOOT: Tommy Meyer builds his father’s legacy. -

Unusual Attitudes and the Aerodynamics of Maneuvering Flight Author’S Note to Flightlab Students
Unusual Attitudes and the Aerodynamics of Maneuvering Flight Author’s Note to Flightlab Students The collection of documents assembled here, under the general title “Unusual Attitudes and the Aerodynamics of Maneuvering Flight,” covers a lot of ground. That’s because unusual-attitude training is the perfect occasion for aerodynamics training, and in turn depends on aerodynamics training for success. I don’t expect a pilot new to the subject to absorb everything here in one gulp. That’s not necessary; in fact, it would be beyond the call of duty for most—aspiring test pilots aside. But do give the contents a quick initial pass, if only to get the measure of what’s available and how it’s organized. Your flights will be more productive if you know where to go in the texts for additional background. Before we fly together, I suggest that you read the section called “Axes and Derivatives.” This will introduce you to the concept of the velocity vector and to the basic aircraft response modes. If you pick up a head of steam, go on to read “Two-Dimensional Aerodynamics.” This is mostly about how pressure patterns form over the surface of a wing during the generation of lift, and begins to suggest how changes in those patterns, visible to us through our wing tufts, affect control. If you catch any typos, or statements that you think are either unclear or simply preposterous, please let me know. Thanks. Bill Crawford ii Bill Crawford: WWW.FLIGHTLAB.NET Unusual Attitudes and the Aerodynamics of Maneuvering Flight © Flight Emergency & Advanced Maneuvers Training, Inc. -

FAA-H-8083-3A, Airplane Flying Handbook -- 3 of 7 Files
Ch 04.qxd 5/7/04 6:46 AM Page 4-1 NTRODUCTION Maneuvering during slow flight should be performed I using both instrument indications and outside visual The maintenance of lift and control of an airplane in reference. Slow flight should be practiced from straight flight requires a certain minimum airspeed. This glides, straight-and-level flight, and from medium critical airspeed depends on certain factors, such as banked gliding and level flight turns. Slow flight at gross weight, load factors, and existing density altitude. approach speeds should include slowing the airplane The minimum speed below which further controlled smoothly and promptly from cruising to approach flight is impossible is called the stalling speed. An speeds without changes in altitude or heading, and important feature of pilot training is the development determining and using appropriate power and trim of the ability to estimate the margin of safety above the settings. Slow flight at approach speed should also stalling speed. Also, the ability to determine the include configuration changes, such as landing gear characteristic responses of any airplane at different and flaps, while maintaining heading and altitude. airspeeds is of great importance to the pilot. The student pilot, therefore, must develop this awareness in FLIGHT AT MINIMUM CONTROLLABLE order to safely avoid stalls and to operate an airplane AIRSPEED This maneuver demonstrates the flight characteristics correctly and safely at slow airspeeds. and degree of controllability of the airplane at its minimum flying speed. By definition, the term “flight SLOW FLIGHT at minimum controllable airspeed” means a speed at Slow flight could be thought of, by some, as a speed which any further increase in angle of attack or load that is less than cruise. -

Soaring Magazine Index for 2000 to 2009/2000To2009 Organized by Author
Soaring Magazine Index for 2000 to 2009/2000to2009 organized by author The contents have all been re-entered by hand, so thereare going to be typos and confusion between author and subject, etc... Please send along any corrections and suggestions for improvement. Department, Columns, or Sections of the magazine areindicated within parentheses ’()’. Subject, and sub-subject, areindicated within squarebrack ets ’[]’. Abernathy, John Jantar StandardSZD 41-A over Minnesota countryside (Glider Gallery) [Photographs; Sailplanes\Jantar\Standard], November,2005, page 30 Abernathy, Mike Soaring Weather Reports Website (SSA Mail) [Weather\Kevin Ford], January,2002, page 4 Tools for Soaring Skill Improvement (Feature Article) [Tr aining], June, 2002, page 30 Cross Country Mentor: Soaring Skill Improvement - Part 2 (Feature Articles) [Techniques\Cross Country], January,2004, page 32 Cross-Country Article (SSA Mail) [Techniques\Cross Country], March, 2004, page 5 Kudos (SSA Mail) [Publicity], September,2004, page 3 "Net Benefits" ImproveYour Soaring Skills (Feature Articles) [Tr aining\Internet Resources], April, 2006, page 34 Net Benefits (Soaring Mail) [Software], June, 2006, page 3 Sidebar: HereismyMemory of a Happy Day in September (Feature Articles) [Soaring\Colorado Mountains], May,2008, page 34 Abernathy, Mike; with Matthew Murray Cloud Street: A Soaring Adventure (Feature Articles) [Techniques\Cross-Country\Photography], July, 2008, page 34 Acee, Janine Region 3 2007 Contest Report (Soaring News) [Competitions\Regionals\Region 3], February,2008,