Control-Structure Interaction Mitigation for NASA's Gateway Daniel
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AI, Robots, and Swarms: Issues, Questions, and Recommended Studies
AI, Robots, and Swarms Issues, Questions, and Recommended Studies Andrew Ilachinski January 2017 Approved for Public Release; Distribution Unlimited. This document contains the best opinion of CNA at the time of issue. It does not necessarily represent the opinion of the sponsor. Distribution Approved for Public Release; Distribution Unlimited. Specific authority: N00014-11-D-0323. Copies of this document can be obtained through the Defense Technical Information Center at www.dtic.mil or contact CNA Document Control and Distribution Section at 703-824-2123. Photography Credits: http://www.darpa.mil/DDM_Gallery/Small_Gremlins_Web.jpg; http://4810-presscdn-0-38.pagely.netdna-cdn.com/wp-content/uploads/2015/01/ Robotics.jpg; http://i.kinja-img.com/gawker-edia/image/upload/18kxb5jw3e01ujpg.jpg Approved by: January 2017 Dr. David A. Broyles Special Activities and Innovation Operations Evaluation Group Copyright © 2017 CNA Abstract The military is on the cusp of a major technological revolution, in which warfare is conducted by unmanned and increasingly autonomous weapon systems. However, unlike the last “sea change,” during the Cold War, when advanced technologies were developed primarily by the Department of Defense (DoD), the key technology enablers today are being developed mostly in the commercial world. This study looks at the state-of-the-art of AI, machine-learning, and robot technologies, and their potential future military implications for autonomous (and semi-autonomous) weapon systems. While no one can predict how AI will evolve or predict its impact on the development of military autonomous systems, it is possible to anticipate many of the conceptual, technical, and operational challenges that DoD will face as it increasingly turns to AI-based technologies. -

Maxar Technologies with Respect to Future Events, Financial Performance and Operational Capabilities
Leading Innovation in the New Space Economy Howard L. Lance President and Chief Executive Officer Forward-Looking Statement This presentation contains forward-looking statements and information, which reflect the current view of Maxar Technologies with respect to future events, financial performance and operational capabilities. The forward-looking statements in this presentation include statements as to managements’ expectations with respect to: the benefits of the transaction and strategic and integration opportunities; the company’s plans, objectives, expectations and intentions; expectations for sales growth, synergies, earnings and performance; shareholder value; and other statements that are not historical facts. Although management of the Company believes that the expectations and assumptions on which such forward-looking statements are based are reasonable, undue reliance should not be placed on the forward-looking statements because the Company can give no assurance that they will prove to be correct. Any such forward-looking statements are subject to various risks and uncertainties which could cause actual results and experience to differ materially from the anticipated results or expectations expressed in this presentation. Additional information concerning these risk factors can be found in the Company’s filings with Canadian securities regulatory authorities, which are available online under the Company’s profile at www.sedar.com, the Company’s filings with the United States Securities and Exchange Commission, or on the Company’s website at www.maxar.com, and in DigitalGlobe’s filings with the SEC, including Item 1A of DigitalGlobe’s Annual Report on Form 10-K for the year ended December 31, 2016. The forward-looking statements contained in this presentation are expressly qualified in their entirety by the foregoing cautionary statements and are based upon data available as of the date of this release and speak only as of such date. -
International Space Station Program Mobile Servicing System (MSS) To
SSP 42004 Revision E Mobile Servicing System (MSS) to User (Generic) Interface Control Document Part I International Space Station Program Revision E, May 22, 1997 Type 1 Approved by NASA National Aeronautics and Space Administration International Space Station Program Johnson Space Center Houston, Texas Contract No. NAS15–10000 SSP 42004, Part 1, Revision E May 22, 1997 REVISION AND HISTORY PAGE REV. DESCRIPTION PUB. DATE C Totally revised Space Station Freedom Document into an International Space Station Alpha Document 03–14–94 D Revision D reference PIRNs 42004–CS–0004A, 42004–NA–0002, 42004–NA–0003, TBD 42004–NA–0004, 42004–NA–0007D, 42004–NA–0008A, 42004–NA–0009C, 42004–NA–0010B, 42004–NA–0013A SSP 42004, Part 1, Revision E May 22, 1997 INTERNATIONAL SPACE STATION PROGRAM MOBILE SERVICING SYSTEM TO USER (GENERIC) INTERFACE CONTROL DOCUMENT MAY 22, 1997 CONCURRENCE PREPARED BY: PRINT NAME ORGN SIGNATURE DATE CHECKED BY: PRINT NAME ORGN SIGNATURE DATE SUPERVISED BY (BOEING): PRINT NAME ORGN SIGNATURE DATE SUPERVISED BY (NASA): PRINT NAME ORGN SIGNATURE DATE DQA: PRINT NAME ORGN SIGNATURE DATE i SSP 42004, Part 1, Revision E May 22, 1997 NASA/CSA INTERNATIONAL SPACE STATION PROGRAM MOBILE SERVICING SYSTEM (MSS) TO USER INTERFACE CONTROL DOCUMENT MAY 22, 1997 Print Name For NASA DATE Print Name For CSA DATE ii SSP 42004, Part 1, Revision E May 22, 1997 PREFACE SSP 42004, Mobile Servicing System (MSS) to User Interface Control Document (ICD) Part I shall be implemented on all new Program contractual and internal activities and shall be included in any existing contracts through contract changes. -

NASA's Lunar Orbital Platform-Gatway
The Space Congress® Proceedings 2018 (45th) The Next Great Steps Feb 28th, 9:00 AM NASA's Lunar Orbital Platform-Gatway Tracy Gill NASA/KSC Technology Strategy Manager Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Gill, Tracy, "NASA's Lunar Orbital Platform-Gatway" (2018). The Space Congress® Proceedings. 17. https://commons.erau.edu/space-congress-proceedings/proceedings-2018-45th/presentations/17 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. National Aeronautics and Space Administration NASA’s Lunar Orbital Platform- Gateway Tracy Gill NASA/Kennedy Space Center Exploration Research & Technology Programs February 28, 2018 45th Space Congress Space Policy Directive-1 “Lead an innovative and sustainable program of exploration with commercial and international partners to enable human expansion across the solar system and to bring back to Earth new knowledge and opportunities. Beginning with missions beyond low-Earth orbit, the United States will lead the return of humans to the Moon for long-term exploration and utilization, followed by human missions to Mars and other destinations.” 2 LUNAR EXPLORATION CAMPAIGN 3 4 STRATEGIC PRINCIPLES FOR SUSTAINABLE EXPLORATION • FISCAL REALISM • ECONOMIC OPPORTUNITY Implementable in the near-term with the buying -
In-Space Assembly of Large Telescopes for Exoplanet
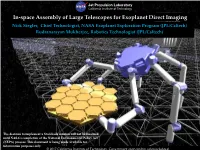
In-space Assembly of Large Telescopes for Exoplanet Direct Imaging Nick Siegler, Chief Technologist, NASA Exoplanet Exploration Program (JPL/Caltech) Rudranarayan Mukherjee, Robotics Technologist (JPL/Caltech) The decision to implement a Starshade mission will not be finalized until NASA’s completion of the National Environmental Policy Act (NEPA) process. This document is being made available for information purposes only. © 2017 California Institute of Technology. Government sponsorship acknowledged. Aperture size limited by launch vehicle Future science needs will require increasingly large telescopes In-Space Large Aperture Telescope Assembly Evolvable Space Telescope (NGAS) 5 6 4 1 3 2 3 4 m 1 2 Polidan et al. 2016 3 In-Space Large Aperture Telescope Assembly Using the Deep Space Gateway (cis-Lunar orbit) to assemble NASA GSFC 4 In-Space Large Aperture Telescope Upgrade Telescope returns from ESL2 for servicing at EML1 Courtesy: Future In-Space Operations (FISO) working group (2007) 5 In-Space Large Aperture Telescope Assembly Free-fliers (e.g. Orion) and assembly module docked to spacecraft bus NASA GSFC 6 DARPA Orbital Express (2007) • Multiple OEDMS autonomous berthing and docking maneuvers In-space firsts: • Transfer of fuel • Transfer of a battery through the use of 3-m long Astro robotic arm NEXTSat DARPA/Boeing/MDA/Ball Aerospace jpl.nasa.gov 7 Robotic Servicing Missions DARPA Robotic Servicing of Geosynchronous Satellites (RSGS) (SSL) DARPAjpl.nasa.gov Robotic Servicing Missions Restore-L (NASA GSFC) • Refueling an existing -
Downloaded for Infrastructure GIS Data
NATIONAL TECHNICAL DOCUMENT FOR ESTABLISHING CARTOGRAPHIC BASE IN INDIA Generation of Large Scale (1:10,000; 1:2,000 & Lesser) Maps for Disaster Management and Planning March 2016 National Disaster Management Authority Government of India CONTENTS Table of Contents Foreword i Preface ii Acknowledgement iii Table of Contents iv-vii List of Figures and Tables viii-ix Abbreviations x-xii Glossary of Terms xiii-xv Generation of National Topographic Database (NTDB) For 1:10,000; 1:2,000 & 1 1 Lesser Scale 1.1 Mapping at 1:10,000; 1:2,000 & Lesser Scale 2 1.2 NTDB on 1:10,000; 1:2,000 & Lesser Scale- A National Need 2 2 Geographical Information System for Disaster Management 3 2.1 GIS in Different Phases of Disaster Management 3-6 2.2 GIS database for Disaster Management 7-8 2.3 Scope for developing a GIS database for Disaster Management 8 2.4 Projection System 8 2.5 Positional Accuracy 8 2.6 Technology 8 2.7 Functional Requirements for Database Management 8-9 3 Critical Facilities Mapping (CFM) 10 3.1 Defining Critical Facilities for Mapping 10-11 4 Geo-referencing of Satellite Imagery 12-13 Technology for 1:10,000 Scale Mapping 14 5 Various Methodologies Available for Preparing Maps of Scale1:10,000 from 15 Images 5.1 Satellite Imaging 15 5.2 Aerial Photography 15 5.3 Comparison Between Satellite Imaging and Aerial Mapping 16 5.3.1 General Differences 16 5.3.2 Comparison of Accuracy of Imaging 17-18 5.4 Comparison of Ground Sampling Distance (GSD) for Satellite Imaging and 18-19 Aerial Photogrammetry 5.5 Aerial Mapping 20 5.5.1 Map Checking -

On-Orbit Assembly of Space Assets: a Path to Affordable and Adaptable Space Infrastructure
CENTER FOR SPACE POLICY AND STRATEGY FEBRUARY 2018 ON-ORBIT ASSEMBLY OF SPACE ASSETS: A PATH TO AFFORDABLE AND ADAPTABLE SPACE INFRASTRUCTURE DANIELLE PISKORZ AND KAREN L. JONES THE AEROSPACE CORPORATION © 2018 The Aerospace Corporation. All trademarks, service marks, and trade names contained herein are the property of their respective owners. Approved for public release; distribution unlimited. OTR201800234 DANIELLE PISKORZ Dr. Danielle Piskorz is a member of the technical staff in The Aerospace Corporation’s Visual and Infrared Sensor Systems Department. She provides data and mission performance analysis in the area of space situational awareness. Her space policy experience derives from positions at the Science and Technology Policy Institute and the National Academies of Sciences, Engineering, and Medicine, where she contributed to a broad range of projects in commercial and civil space. She holds a Ph.D. in planetary science from the California Institute of Technology and a B.S. in physics from Massachusetts Institute of Technology. KAREN L. JONES Karen Jones is a senior project leader with The Aerospace Corporation’s Center for Space Policy and Strategy. She has experience and expertise in the disciplines of technology strategy, program evaluation, and regulatory and policy analysis spanning the public sector, telecommunications, aerospace defense, energy, and environmental industries. She has an M.B.A. from the Yale School of Management. CONTRIBUTORS The authors would like to acknowledge contributions from Roy Nakagawa, Henry Helvajian, and Thomas Heinsheimer of The Aerospace Corporation and David Barnhart of the University of Southern California. ABOUT THE CENTER FOR SPACE POLICY AND STRATEGY The Center for Space Policy and Strategy is a specialized research branch within The Aerospace Corporation, a nonprofit organization that operates a federally funded research and development center providing objective technical analysis for programs of national significance. -

Spacecraft Dormancy Autonomy Analysis for a Crewed Martian Mission
NASA/TM-2018-219965 Spacecraft Dormancy Autonomy Analysis for a Crewed Martian Mission Julia Badger Lead Author, Editor Contributors: Avionics Don Higbee Communications Tim Kennedy, Sharada Vitalpur ECLSS Miriam Sargusingh, Sarah Shull Guidance, Navigation and Control Bill Othon Power Francis J. Davies Propulsion Eric Hurlbert Robotics Julia Badger Software Neil Townsend Spacecraft Emergency Responses Jeff Mauldin, Emily Nelson Structures Kornel Nagy Thermal Katy Hurlbert Vehicle Systems Management Jeremy Frank Crew Perspective Stan Love National Aeronautics and Space Administration July 2018 NASA STI Program ... in Profile Since its founding, NASA has been dedicated to the CONFERENCE PUBLICATION. advancement of aeronautics and space science. The Collected papers from scientific and NASA scientific and technical information (STI) technical conferences, symposia, seminars, program plays a key part in helping NASA maintain or other meetings sponsored or this important role. co-sponsored by NASA. The NASA STI program operates under the SPECIAL PUBLICATION. Scientific, auspices of the Agency Chief Information Officer. technical, or historical information from It collects, organizes, provides for archiving, and NASA programs, projects, and missions, disseminates NASA’s STI. The NASA STI often concerned with subjects having program provides access to the NTRS Registered substantial public interest. and its public interface, the NASA Technical Report Server, thus providing one of the largest TECHNICAL TRANSLATION. collections of aeronautical and space science STI in English-language translations of foreign the world. Results are published in both non-NASA scientific and technical material pertinent to channels and by NASA in the NASA STI Report NASA’s mission. Series, which includes the following report types: Specialized services also include organizing TECHNICAL PUBLICATION. -

Humanity and Space Deep Space Habitation Module
Humanity and Space Deep Space Habitation Module An Interactive Qualifying Project Report submitted to the faculty of Worcester Polytechnic Institute in partial fulfillment of the requirements for the Degree of Bachelor of Science by Joshua Fuller and Zachary Chester Submitted to: Professor Mayer Humi July 01, 2016 This report represents work of WPI undergraduate students submitted to the faculty as evidence of a degree requirement. WPI routinely publishes these reports on its web site without editorial or peer review. For more information about the projects program at WPI, see http://www.wpi.edu/Academics/Projects. Abstract This project introduces the SAGON spacecraft, a deep space habitable environment using technology available today to address areas NASA considers deficient. This design was submitted to the NASA NextSTEP-2 proposal solicitation. The craft is capable of integrating newer technologies, providing a longer lifespan for the design. Additionally, this project highlights the steps in colonizing Mars using the craft. In accordance with NASA’s Mars Exploration program’s goals, SAGON can help NASA launch a manned mission to Mars by the 2030’s. 2 Executive Summary Mars offers an attractive first step for expansion into the Solar System and beyond. This offers a range of possibilities; from mining and refueling, to science centers, to an additional home, to ensure the future of humanity, Mars plays a vital role in our future. Humans have not ventured into the extreme deep space environment. This environment, filled with radiation and great expanses, proves difficult to overcome. The proposed spacecraft, Solar Adaptive Gathering/Observation Nautilus (SAGON), is a vessel designed for manned deep space exploration. -

Gait Optimization for Multi-Legged Walking Robots, with Application to a Lunar Hexapod
GAIT OPTIMIZATION FOR MULTI-LEGGED WALKING ROBOTS, WITH APPLICATION TO A LUNAR HEXAPOD A DISSERTATION SUBMITTED TO THE DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS AND THE COMMITTEE ON GRADUATE STUDIES OF STANFORD UNIVERSITY IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY Daniel Ch´avez-Clemente January 2011 © 2011 by Daniel Chavez Clemente. All Rights Reserved. Re-distributed by Stanford University under license with the author. This work is licensed under a Creative Commons Attribution- Noncommercial 3.0 United States License. http://creativecommons.org/licenses/by-nc/3.0/us/ This dissertation is online at: http://purl.stanford.edu/px063cb7934 Includes supplemental files: 1. This video shows a simulation of the zero-interaction gait optimization for the ATHLETE robot. (DanielChavezSwaySimulation.wmv) ii I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. Stephen Rock, Primary Adviser I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. J Gerdes I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. Jean-Claude Latombe I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. Terrence Fong Approved for the Stanford University Committee on Graduate Studies. -

Leading in the New Space Economy
Leading in the New Space Economy September 2018 Forward-Looking Statement Certain statements and other information included in this presentation constitute "forward-looking information" or "forward-looking statements" (collectively, "forward-looking statements") under applicable securities laws. Statements including words such as "may", "will", "could", "should", "would", "plan", "potential", "intend", "anticipate", "believe", "estimate" or "expect" and other words, terms and phrases of similar meaning are often intended to identify forward-looking statements, although not all forward-looking statements contain these identifying words. Forward-looking statements involve estimates, expectations, projections, goals, forecasts, assumptions, risks and uncertainties, as well as other statements referring to or including forward-looking information included in this presentation. Forward-looking statements are subject to various risks and uncertainties which could cause actual results to differ materially from the anticipated results or expectations expressed in this presentation. As a result, although management of the Company believes that the expectations and assumptions on which such forward-looking statements are based are reasonable, undue reliance should not be placed on the forward-looking statements because the Company can give no assurance that they will prove to be correct. The risks that could cause actual results to differ materially from current expectations include, but are not limited to, the risk factors and other disclosures about the Company and its business included in the Company's continuous disclosure materials filed from time to time with Canadian and U.S. securities regulatory authorities, which are available online under the Company's SEDAR profile at www.sedar.com, under the Company's EDGAR profile at www.sec.gov or on the Company's website at www.maxar.com. -
Collision Avoidance Maneuvers
National Aeronautics and Space Administration U.S. Space Debris Environment, Operations, and Research Updates J.-C. Liou, Ph.D. Chief Scientist for Orbital Debris National Aeronautics and Space Administration United States 55th Session of the Scientific and Technical Subcommittee Committee on the Peaceful Uses of Outer Space, United Nations 29 January – 9 February 2018, Vienna National Aeronautics and Space Administration Presentation Outline • Space Missions in 2017 • Earth Satellite Population • Collision Avoidance Maneuvers • Postmission Disposal of U.S. Spacecraft • Space Situational Awareness (SSA) and the Space Debris Sensor (SDS) 2/12 National Aeronautics and Space Administration Worldwide Space Activity in 2017 • A total of 86 space launches placed more than 400 spacecraft into Earth orbits during 2017, following the trend of increase over the past decade 140 120 100 80 60 40 20 Worldwide LaunchesWorldwide (Earth Orbit orBeyond) 0 1955 1960 1965 1970 1975 1980 1985 1990 1995 2000 2005 2010 2015 2020 3/12 • Number of Objects 10000 12000 14000 16000 18000 20000 National Aeronautics and Space Administration Space and Aeronautics National objects Earth orbitcontinued in to increase 2017 in According Satellite to theCatalog, U.S. the number of10 cm andlarger 2000 4000 6000 8000 Evolution of the Cataloged Satellite Population 0 1956 1958 1960 Mission-relatedDebris Rocket Bodies Spacecraft Fragmentation Debris TotalObjects 1962 1964 1966 1968 1970 1972 1974 1976 1978 1980 Iridiumand 33 Collision2251 Cosmos of 1982 4 Year /12 1984 1986