Epsilon Launch Vehicle User's Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Vulcan Centaur
VULCAN CENTAUR The Vulcan Centaur rocket design leverages the flight-proven success of the Delta IV and Atlas V launch vehicles while introducing new technologies and innovative features to ensure a reliable and aordable space launch service. Vulcan Centaur will service a diverse range of markets including 225 ft commercial, civil, science, cargo and national security space customers. 1 The spacecraft is encapsulated in a 5.4-m- (17.7-ft-) diameter payload fairing (PLF), a sandwich composite structure made with a vented aluminum-honeycomb core and graphite-epoxy face sheets. The bisector (two-piece shell) PLF encapsulates the spacecraft. The payload attach fitting (PAF) is a similar sandwich composite structure creating the mating interface from spacecraft to second stage. The PLF separates using a debris-free horizontal and vertical separation system with 2 200 ft spring packs and frangible joint assembly. The payload fairing is available in the 15.5-m (51-ft) standard and 21.3-m (70-ft) 1 long configurations. The Centaur upper stage is 5.4 m (17.7 ft) in diameter and 3 11.7 m (38.5 ft) long with a 120,000-lb propellant capacity. Its propellant tanks are constructed of pressure-stabilized, corrosion-resistant stainless steel. Centaur is a liquid hydrogen/liquid oxygen-fueled vehicle, with two RL10C 4 engines. The Vulcan Centaur Heavy vehicle, flies the upgraded 2 Centaur using RL10CX engines with nozzle extensions. The 5 175 ft cryogenic tanks are insulated with spray-on foam insulation (SOFI) to manage boil o of cryogens during flight. An aft equipment shelf provides the structural mountings for vehicle electronics. -

Rocket Nozzles: 75 Years of Research and Development
Sådhanå Ó (2021) 46:76 Indian Academy of Sciences https://doi.org/10.1007/s12046-021-01584-6Sadhana(0123456789().,-volV)FT3](0123456789().,-volV) Rocket nozzles: 75 years of research and development SHIVANG KHARE1 and UJJWAL K SAHA2,* 1 Department of Energy and Process Engineering, Norwegian University of Science and Technology, 7491 Trondheim, Norway 2 Department of Mechanical Engineering, Indian Institute of Technology Guwahati, Guwahati 781039, India e-mail: [email protected]; [email protected] MS received 28 August 2020; revised 20 December 2020; accepted 28 January 2021 Abstract. The nozzle forms a large segment of the rocket engine structure, and as a whole, the performance of a rocket largely depends upon its aerodynamic design. The principal parameters in this context are the shape of the nozzle contour and the nozzle area expansion ratio. A careful shaping of the nozzle contour can lead to a high gain in its performance. As a consequence of intensive research, the design and the shape of rocket nozzles have undergone a series of development over the last several decades. The notable among them are conical, bell, plug, expansion-deflection and dual bell nozzles, besides the recently developed multi nozzle grid. However, to the best of authors’ knowledge, no article has reviewed the entire group of nozzles in a systematic and comprehensive manner. This paper aims to review and bring all such development in one single frame. The article mainly focuses on the aerodynamic aspects of all the rocket nozzles developed till date and summarizes the major findings covering their design, development, utilization, benefits and limitations. -

Astra Space, Inc. (Exact Name of Registrant As Specified in Its Charter)
UNITED STATES SECURITIES AND EXCHANGE COMMISSION WASHINGTON, D.C. 20549 FORM 8-K CURRENT REPORT Pursuant to Section 13 or 15(d) of the Securities Exchange Act of 1934 Date of Report (Date of earliest event reported): August 27, 2021 Astra Space, Inc. (Exact name of Registrant as Specified in Its Charter) Delaware 001-39426 14-1916687 (State or Other Jurisdiction (Commission File Number) (IRS Employer of Incorporation) Identification No.) 1900 Skyhawk Street Alameda, California 94501 (Address of Principal Executive Offices) (Zip Code) Registrant’s Telephone Number, Including Area Code: (866) 278-7217 Check the appropriate box below if the Form 8-K filing is intended to simultaneously satisfy the filing obligation of the registrant under any of the following provisions: ☐ Written communications pursuant to Rule 425 under the Securities Act (17 CFR 230.425) ☐ Soliciting material pursuant to Rule 14a-12 under the Exchange Act (17 CFR 240.14a-12) ☐ Pre-commencement communications pursuant to Rule 14d-2(b) under the Exchange Act (17 CFR 240.14d-2(b)) ☐ Pre-commencement communications pursuant to Rule 13e-4(c) under the Exchange Act (17 CFR 240.13e-4(c)) Securities registered pursuant to Section 12(b) of the Act: Trading Title of each class Symbol(s) Name of each exchange on which registered Class A common stock, par value $0.0001 per share ASTR NASDAQ Global Select Market Warrants to purchase one share of common stock, each at ASTRW NASDAQ Global Select Market an exercise price of $11.50 Indicate by check mark whether the registrant is an emerging growth company as defined in Rule 405 of the Securities Act of 1933 (§ 230.405 of this chapter) or Rule 12b-2 of the Securities Exchange Act of 1934 (§ 240.12b-2 of this chapter). -

GB-ASTRA 3B-Comsatbw-21Mai V
A BOOST FOR SPACE COMMUNICATIONS SATELLITES For its first launch of the year, Arianespace will orbit two communications satellites: ASTRA 3B for the Luxembourg-based operator SES ASTRA, and COMSATBw-2 for Astrium as part of a contract with the German Ministry of Defense. The choice of Arianespace by leading space communications operators and manufacturers is clear international recognition of the company’s excellence in launch services. Because of its reliability and availability, the Arianespace launch system continues to set the global standard. Ariane 5 is the only commercial satellite launcher now on the market capable of simultaneously launching two payloads. Over the last two decades, Arianespace and SES have developed an exceptional relationship. ASTRA 3B will be the 33rd satellite from the SES group (Euronext Paris and Luxembourg Bourse: SESG) to have chosen the European launcher. SES ASTRA operates the leading direct-to-home TV broadcast system in Europe, serving more than 125 million households via DTH and cable networks. ASTRA 3B was built by Astrium using a Eurostar E 3000 platform, and will weigh approximately 5,500 kg at launch. Fitted with 60 active Ku-band transponders and four Ka-band transponders, ASTRA 3B will be positioned at 23.5 degrees East. It will deliver high-power broadcast services across all of Europe, and offers a design life of 15 years. Astrium chose Arianespace for the launch of two military communications satellites, COMSATBw-1 and COMSATBw-2, as part of a satellite communications system supplied to the German Ministry of Defense. The first satellite in this family, COMSATBw-1, was launched by Arianespace in October 2009. -
Status of the Space Shuttle Solid Rocket Booster
The Space Congress® Proceedings 1980 (17th) A New Era In Technology Apr 1st, 8:00 AM Status of The Space Shuttle Solid Rocket Booster William P. Horton Solid Rocket Booster Engineering Office, George C. Marshall Space Flight Center, Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Horton, William P., "Status of The Space Shuttle Solid Rocket Booster" (1980). The Space Congress® Proceedings. 3. https://commons.erau.edu/space-congress-proceedings/proceedings-1980-17th/session-1/3 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. STATUS OF THE SPACE SHUTTLE SOLID ROCKET BOOSTER William P. Horton, Chief Engineer Solid Rocket Booster Engineering Office George C. Marshall Space Flight Center, AL 35812 ABSTRACT discuss retrieval and refurbishment plans for Booster reuse, and will address Booster status Two Solid Rocket Boosters provide the primary for multimission use. first stage thrust for the Space Shuttle. These Boosters, the largest and most powerful solid rocket vehicles to meet established man- BOOSTER CONFIGURATION rated design criteria, are unique in that they are also designed to be recovered, refurbished, It is appropriate to review the Booster config and reused. uration before describing the mission profile. The Booster is 150 feet long and is 148 inches The first SRB f s have been stacked on the in diameter (Figure 1), The inert weight Mobile Launch Platform at the Kennedy Space is 186,000 pounds and the propellant weight is Center and are ready to be mated with the approximately 1.1 million pounds for each External Tank and Orbiter in preparation for Booster. -

Atlas V Cutaway Poster
ATLAS V Since 2002, Atlas V rockets have delivered vital national security, science and exploration, and commercial missions for customers across the globe including the U.S. Air Force, the National Reconnaissance Oice and NASA. 225 ft The spacecraft is encapsulated in either a 5-m (17.8-ft) or a 4-m (13.8-ft) diameter payload fairing (PLF). The 4-m-diameter PLF is a bisector (two-piece shell) fairing consisting of aluminum skin/stringer construction with vertical split-line longerons. The Atlas V 400 series oers three payload fairing options: the large (LPF, shown at left), the extended (EPF) and the extra extended (XPF). The 5-m PLF is a sandwich composite structure made with a vented aluminum-honeycomb core and graphite-epoxy face sheets. The bisector (two-piece shell) PLF encapsulates both the Centaur upper stage and the spacecraft, which separates using a debris-free pyrotechnic actuating 200 ft system. Payload clearance and vehicle structural stability are enhanced by the all-aluminum forward load reactor (FLR), which centers the PLF around the Centaur upper stage and shares payload shear loading. The Atlas V 500 series oers 1 three payload fairing options: the short (shown at left), medium 18 and long. 1 1 The Centaur upper stage is 3.1 m (10 ft) in diameter and 12.7 m (41.6 ft) long. Its propellant tanks are constructed of pressure-stabilized, corrosion-resistant stainless steel. Centaur is a liquid hydrogen/liquid oxygen-fueled vehicle. It uses a single RL10 engine producing 99.2 kN (22,300 lbf) of thrust. -
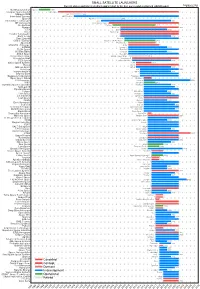
Small Satellite Launchers
SMALL SATELLITE LAUNCHERS NewSpace Index 2020/04/20 Current status and time from development start to the first successful or planned orbital launch NEWSPACE.IM Northrop Grumman Pegasus 1990 Scorpius Space Launch Demi-Sprite ? Makeyev OKB Shtil 1998 Interorbital Systems NEPTUNE N1 ? SpaceX Falcon 1e 2008 Interstellar Technologies Zero 2021 MT Aerospace MTA, WARR, Daneo ? Rocket Lab Electron 2017 Nammo North Star 2020 CTA VLM 2020 Acrux Montenegro ? Frontier Astronautics ? ? Earth to Sky ? 2021 Zero 2 Infinity Bloostar ? CASIC / ExPace Kuaizhou-1A (Fei Tian 1) 2017 SpaceLS Prometheus-1 ? MISHAAL Aerospace M-OV ? CONAE Tronador II 2020 TLON Space Aventura I ? Rocketcrafters Intrepid-1 2020 ARCA Space Haas 2CA ? Aerojet Rocketdyne SPARK / Super Strypi 2015 Generation Orbit GoLauncher 2 ? PLD Space Miura 5 (Arion 2) 2021 Swiss Space Systems SOAR 2018 Heliaq ALV-2 ? Gilmour Space Eris-S 2021 Roketsan UFS 2023 Independence-X DNLV 2021 Beyond Earth ? ? Bagaveev Corporation Bagaveev ? Open Space Orbital Neutrino I ? LIA Aerospace Procyon 2026 JAXA SS-520-4 2017 Swedish Space Corporation Rainbow 2021 SpinLaunch ? 2022 Pipeline2Space ? ? Perigee Blue Whale 2020 Link Space New Line 1 2021 Lin Industrial Taymyr-1A ? Leaf Space Primo ? Firefly 2020 Exos Aerospace Jaguar ? Cubecab Cab-3A 2022 Celestia Aerospace Space Arrow CM ? bluShift Aerospace Red Dwarf 2022 Black Arrow Black Arrow 2 ? Tranquility Aerospace Devon Two ? Masterra Space MINSAT-2000 2021 LEO Launcher & Logistics ? ? ISRO SSLV (PSLV Light) 2020 Wagner Industries Konshu ? VSAT ? ? VALT -

Corporate Profile
2013 : Epsilon Launch Vehicle 2009 : International Space Station 1997 : M-V Launch Vehicle 1955 : The First Launched Pencil Rocket Corporate Profile Looking Ahead to Future Progress IHI Aerospace (IA) is carrying out the development, manufacture, and sales of rocket projectiles, and has been contributing in a big way to the indigenous space development in Japan. We started research on rocket projectiles in 1953. Now we have become a leading comprehensive manufacturer carrying out development and manufacture of rocket projectiles in Japan, and are active in a large number of fields such as rockets for scientific observation, rockets for launching practical satellites, and defense-related systems, etc. In the space science field, we cooperate with the Japan Aerospace Exploration Agency (JAXA) to develop and manufacture various types of observational rockets named K (Kappa), L (Lambda), and S (Sounding), and the M (Mu) rockets. With the M rockets, we have contributed to the launch of many scientific satellites. In 2013, efforts resulted in the successful launch of an Epsilon Rocket prototype, a next-generation solid rocket which inherited the 2 technologies of all the aforementioned rockets. In the practical satellite booster rocket field, We cooperates with the JAXA and has responsibilities in the solid propellant field including rocket boosters, upper-stage motors in development of the N, H-I, H-II, and H-IIA H-IIB rockets. We have also achieved excellent results in development of rockets for material experiments and recovery systems, as well as the development of equipment for use in a space environment or experimentation. In the defense field, we have developed and manufactured a variety of rocket systems and rocket motors for guided missiles, playing an important role in Japanese defense. -

ASTRONAUTICS and AERONAUTICS, 1977 a Chronology
NASA SP--4022 ASTRONAUTICS AND AERONAUTICS, 1977 A Chronology Eleanor H. Ritchie ' The NASA History Series Scientific and Technical Information Branch 1986 National Aeronautics and Space Administration Washington, DC Four spacecraft launched by NASA in 1977: left to right, top, ESA’s Geos 1 and NASA’s Heao 1; bottom, ESA’s Isee 2 on NASA’s Isee 1, and Italy’s Wo. (NASA 77-H-157,77-H-56, 77-H-642, 77-H-484) Contents Preface ...................................................... v January ..................................................... 1 February .................................................... 21 March ...................................................... 47 April ....................................................... 61 May ........................................................ 77 June ...................................................... 101 July ....................................................... 127 August .................................................... 143 September ................................................. 165 October ................................................... 185 November ................................................. 201 December .................................................. 217 Appendixes A . Satellites, Space Probes, and Manned Space Flights, 1977 .......237 B .Major NASA Launches, 1977 ............................... 261 C. Manned Space Flights, 1977 ................................ 265 D . NASA Sounding Rocket Launches, 1977 ..................... 267 E . Abbreviations of References -

Abstract US Patent References
Architecture for Reusable Responsive Exploration Systems: ARES - Platform and Reusable Responsive Architecture for Innovative Space Exploration: PRAISE (Part 1) PATENT PENDING Abstract A comprehensive Modular Reusable Responsive Space Exploration Platform (Architecture) composed of multiple modular reusable elements such that the assemblies can be flexibly configured into systems for low earth orbits launches and for long-range exploration such as orbits to moon, Lagrange points and others. This platform & architecture is named as Architecture for Reusable Responsive Exploration System (acronym ARES) / Platform and Reusable Responsive Architecture for Innovative Space Exploration (acronym PRAISE), in short ARES/PRAISE or simply ARES. It is also known as Alpha Spaces Architecture and Platform (acronym ASAP), in short as “αPlatform” or “αArchitecture”, or “αAres”. As an example, the configuration involves reusable lightweight wing, core stage, (optional booster stages) combination of expendable upper stage and reusable crew capsule. Further, the expendable upper stage can be re-used to serve as in-orbit fuel depots and for other innovative uses. This is first part of the multi part patent application. Inventor: Atreya, Dinesh S. US Patent References US Patent 6158693 - Recoverable booster stage and recovery method US Patent 4878637 - Modular space station US Patent 6726154 - Reusable space access launch vehicle system US Patent 6113032 - Delivering liquid propellant in a reusable booster stage US Patent 4557444 - Aerospace vehicle US Patent 4880187 - Multipurpose modular spacecraft US Patent 4452412 - Space shuttle with rail system and aft thrust structure securing solid rocket boosters to external tank US Patent 4802639 - Horizontal-takeoff transatmospheric launch system US Patent 4884770 - Earth-to-orbit vehicle providing a reusable orbital stage US Patent 4265416 - Orbiter/launch system U.S. -

Photographs Written Historical and Descriptive
CAPE CANAVERAL AIR FORCE STATION, MISSILE ASSEMBLY HAER FL-8-B BUILDING AE HAER FL-8-B (John F. Kennedy Space Center, Hanger AE) Cape Canaveral Brevard County Florida PHOTOGRAPHS WRITTEN HISTORICAL AND DESCRIPTIVE DATA HISTORIC AMERICAN ENGINEERING RECORD SOUTHEAST REGIONAL OFFICE National Park Service U.S. Department of the Interior 100 Alabama St. NW Atlanta, GA 30303 HISTORIC AMERICAN ENGINEERING RECORD CAPE CANAVERAL AIR FORCE STATION, MISSILE ASSEMBLY BUILDING AE (Hangar AE) HAER NO. FL-8-B Location: Hangar Road, Cape Canaveral Air Force Station (CCAFS), Industrial Area, Brevard County, Florida. USGS Cape Canaveral, Florida, Quadrangle. Universal Transverse Mercator Coordinates: E 540610 N 3151547, Zone 17, NAD 1983. Date of Construction: 1959 Present Owner: National Aeronautics and Space Administration (NASA) Present Use: Home to NASA’s Launch Services Program (LSP) and the Launch Vehicle Data Center (LVDC). The LVDC allows engineers to monitor telemetry data during unmanned rocket launches. Significance: Missile Assembly Building AE, commonly called Hangar AE, is nationally significant as the telemetry station for NASA KSC’s unmanned Expendable Launch Vehicle (ELV) program. Since 1961, the building has been the principal facility for monitoring telemetry communications data during ELV launches and until 1995 it processed scientifically significant ELV satellite payloads. Still in operation, Hangar AE is essential to the continuing mission and success of NASA’s unmanned rocket launch program at KSC. It is eligible for listing on the National Register of Historic Places (NRHP) under Criterion A in the area of Space Exploration as Kennedy Space Center’s (KSC) original Mission Control Center for its program of unmanned launch missions and under Criterion C as a contributing resource in the CCAFS Industrial Area Historic District. -

INVESTOR PRESENTATION JANUARY 2021 February 2, 2021
INVESTOR PRESENTATION JANUARY 2021 February 2, 2021 PROPRIETARY & CONFIDENTIAL – DO NOT REDISTRIBUTE DISCLAIMER AND FORWARD LOOKING STATEMENTS This presentation (this “Presentation”) was prepared for informational purposes only to assist interested parties in making their own evaluation of the proposed transaction (the “Transaction”) between Holicity Inc. (“HOL”, “we”, or “our”) and Astra Space, Inc. (“Astra”). By accepting this Presentation, each recipient agrees: (i) to maintain the confidentiality of all information that is contained in this Presentation and not already in the public domain; and (ii) to use this Presentation for the sole purpose of evaluating Astra. This Presentation is for strategic discussion purposes only and does not constitute an offer to purchase nor a solicitation of an offer to sell shares of HOL, Astra or any successor entity of the Transaction. This presentation is incomplete without reference to, and should be viewed solely in conjunction with, the oral briefing provided by HOL. This Presentation is not intended to form the basis of any investment decision by the recipient and does not constitute investment, tax or legal advice. No representation, express or implied, is or will be given by HOL, Astra or their respective affiliates and advisors as to the accuracy or completeness of the information contained herein, or any other written or oral information made available in the course of an evaluation of the Transaction. This Presentation and the oral briefing provided by HOL or Astra may contain certain “forward-looking statements” within the meaning of the Private Securities Litigation Reform Act of 1995, Section 27A of the Securities Act and Section 21E of the Securities Exchange Act of 1934, as amended, including statements regarding HOL’s, Astra’s on their management teams’ expectations, hopes, beliefs, intentions or strategies regarding the future.