Hermes Executive Summary
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Garmin Reveals Autoland Feature Rotorcraft Industry Slams Possible by Matt Thurber NYC Helo Ban Page 45
PUBLICATIONS Vol.50 | No.12 $9.00 DECEMBER 2019 | ainonline.com Flying Short-field landings in the Falcon 8X page 24 Regulations UK Labour calls for bizjet ban page 14 Industry Forecast sees deliveries rise in 2020 page 36 Gratitude for Service Honor flight brings vets to D.C. page 41 Air Transport Lion Air report cites multiple failures page 51 Rotorcraft Garmin reveals Autoland feature Industry slams possible by Matt Thurber NYC helo ban page 45 For the past eight years, Garmin has secretly Mode. The Autoland system is designed to Autoland and how it works, I visited been working on a fascinating new capabil- safely fly an airplane from cruising altitude Garmin’s Olathe, Kansas, headquarters for ity, an autoland function that can rescue an to a suitable runway, then land the airplane, a briefing and demo flight in the M600 with airplane with an incapacitated pilot or save apply brakes, and stop the engine. Autoland flight test pilot and engineer Eric Sargent. a pilot when weather conditions present can even switch on anti-/deicing systems if The project began in 2011 with a Garmin no other safe option. Autoland should soon necessary. engineer testing some algorithms that could receive its first FAA approval, with certifi- Autoland is available for aircraft manu- make an autolanding possible, and in 2014 cation expected shortly in the Piper M600, facturers to incorporate in their airplanes Garmin accomplished a first autolanding in followed by the Cirrus Vision Jet. equipped with Garmin G3000 avionics and a Columbia 400 piston single. In September The Garmin Autoland system is part of autothrottle. -
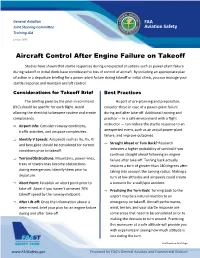
Aircraft Control After Engine Failure on Takeoff
General AviaƟon FAA Joint Steering CommiƩee Aviaon Safety Training Aid January 2016 Aircraft Control After Engine Failure on Takeoff Studies have shown that startle responses during unexpected situaons such as power‐plant failure during takeoff or inial climb have contributed to loss of control of aircra. By including an appropriate plan of acon in a departure briefing for a power‐plant failure during takeoff or inial climb, you can manage your startle response and maintain aircra control. Considerations for Takeoff Brief Best Practices The briefing given by the pilot‐in‐command As part of pre‐planning and preparaon, (PIC) should be specific for each flight. Avoid consider these in case of a power‐plant failure allowing the checklist to become roune and create during and aer take‐off. Addional training and complacency. pracce — in a safe environment with a flight instructor — can reduce the startle response to an Airport Info: Consider runway condions, traffic acvies, and airspace complexies. unexpected event, such as an actual power‐plant failure, and improve outcomes. Idenfy V Speeds: Airspeeds such as Vy, Vx, Vr and best glide should be considered for current Straight Ahead or Turn Back? Research condions prior to takeoff. indicates a higher probability of survival if you connue straight ahead following an engine Terrain/Obstrucons: Mountains, power‐lines, failure aer take‐off. Turning back actually trees or towers may become obstrucons requires a turn of greater than 180 degrees aer during emergencies; idenfy them prior to taking into account the turning radius. Making a departure. turn at low altudes and airspeeds could create Abort Point: Establish an abort point prior to a scenario for a stall/spin accident. -

FAA Order JO 7110.65U, Air Traffic Control
ORDER JO 7110.65U Air Traffic Organization Policy Effective Date: February 9, 2012 SUBJ: Air Traffic Control This order prescribes air traffic control procedures and phraseology for use by personnel providing air traffic control services. Controllers are required to be familiar with the provisions of this order that pertain to their operational responsibilities and to exercise their best judgment if they encounter situations not covered by it. Distribution: ZAT-710, ZAT-464 Initiated By: AJV-0 Vice President, System Operations Services RECORD OF CHANGES DIRECTIVE NO. JO 7110.65U CHANGE SUPPLEMENTS CHANGE SUPPLEMENTS TO OPTIONAL TO OPTIONAL BASIC BASIC FAA Form 1320−5 (6−80) USE PREVIOUS EDITION 2/9/12 JO 7110.65U Explanation of Changes Basic Direct questions through appropriate facility/service center office staff to the Office of Primary Interest (OPI) a. 2−5−2. NAVAID TERMS d. 5−9−10. SIMULTANEOUS INDEPEND- 4−2−1. CLEARANCE ITEMS ENT APPROACHES TO WIDELY-SPACED 4−2−5. ROUTE OR ALTITUDE PARALLEL RUNWAYS WITHOUT FINAL AMENDMENTS MONITORS 4−2−9. CLEARANCE ITEMS 4−3−2. DEPARTURE CLEARANCE This change adds a new paragraph allowing 4−3−3. ABBREVIATED DEPARTURE simultaneous independent approaches to widely CLEARANCE spaced parallel runways separated by 9,000 feet or 4−7−1. CLEARANCE INFORMATION more−without monitors. This change cancels and 4−8−2. CLEARANCE LIMIT incorporates N JO 7110.559, Simultaneous Inde- This change clarifies how to issue clearances that pendent Approaches to Widely-Spaced Parallel contain NAVAIDs and provides new phraseology Runways Without Final Monitors, effective and examples. July 29, 2011. b. -

Barnett, James Scott OH128
Wisconsin Veterans Museum Research Center Transcript of an Oral History Interview with JAMES S. BARNETT Navy, Airplane navigator and co-pilot, World War II 2000 OH 128 1 OH 128 Barnett, James Scott, (1918-). Oral History Interview, 2000. User Copy: 1 sound cassette (ca. 65 min.); analog, 1 7/8 ips, mono. Master Copy: 1 sound cassette (ca. 65 min.); analog, 1 7/8 ips, mono. Video Recording: 1 videorecording (ca. 65 min.); ½ inch, color. Transcript: 0.1 linear ft. (1 folder). Abstract: James Barnett, a Kenosha, Wisconsin native, discusses his World War II service as an aerial navigator and co-pilot with the Navy. Barnett mentions enlisting in 1942, attending preflight training in Iowa, and learning about navigation and gunnery at the Naval Air Station (Florida). He relates his duties as a crewmember of a PBY squadron in Hawaii. Barnett talks about bombing missions to the Gilbert Islands, Wake Island, and Ellice Island. He recalls how he and two other crew members were grounded with dysentery the day that their plane and the rest of the crew were shot down and killed. Barnett mentions his transfer to New Guinea and missions to the Philippines and Truk. He talks about getting hit in the leg during a bombing run and doing an emergency landing on Kwajalein due to engine damage. Barnett speaks of his return to the United States and being stationed at Kaneohe Bay (Hawaii). He describes losing a plane due to landing gear malfunction. He talks about flying from San Francisco to Hawaii in nine hours and judging whether to turn around using “how-goes-it” curves. -
(VL for Attrid
ECCAIRS Aviation 1.3.0.12 Data Definition Standard English Attribute Values ECCAIRS Aviation 1.3.0.12 VL for AttrID: 391 - Event Phases Powered Fixed-wing aircraft. (Powered Fixed-wing aircraft) 10000 This section covers flight phases specifically adopted for the operation of a powered fixed-wing aircraft. Standing. (Standing) 10100 The phase of flight prior to pushback or taxi, or after arrival, at the gate, ramp, or parking area, while the aircraft is stationary. Standing : Engine(s) Not Operating. (Standing : Engine(s) Not Operating) 10101 The phase of flight, while the aircraft is standing and during which no aircraft engine is running. Standing : Engine(s) Start-up. (Standing : Engine(s) Start-up) 10102 The phase of flight, while the aircraft is parked during which the first engine is started. Standing : Engine(s) Run-up. (Standing : Engine(s) Run-up) 990899 The phase of flight after start-up, during which power is applied to engines, for a pre-flight engine performance test. Standing : Engine(s) Operating. (Standing : Engine(s) Operating) 10103 The phase of flight following engine start-up, or after post-flight arrival at the destination. Standing : Engine(s) Shut Down. (Standing : Engine(s) Shut Down) 10104 Engine shutdown is from the start of the shutdown sequence until the engine(s) cease rotation. Standing : Other. (Standing : Other) 10198 An event involving any standing phase of flight other than one of the above. Taxi. (Taxi) 10200 The phase of flight in which movement of an aircraft on the surface of an aerodrome under its own power occurs, excluding take- off and landing. -

China-US Aircraft Collision Incident of April 2001
Order Code RL30946 CRS Report for Congress Received through the CRS Web China-U.S. Aircraft Collision Incident of April 2001: Assessments and Policy Implications Updated October 10, 2001 Shirley A. Kan (Coordinator), Richard Best, Christopher Bolkcom, Robert Chapman, Richard Cronin, Kerry Dumbaugh, Stuart Goldman, Mark Manyin, Wayne Morrison, Ronald O’Rourke Foreign Affairs, Defense, and Trade Division David Ackerman American Law Division Congressional Research Service The Library of Congress China-U.S. Aircraft Collision Incident of April 2001: Assessments and Policy Implications Summary The serious incident of April 2001 between the United States and the People’s Republic of China (PRC) involved a collision over the South China Sea between a U.S. Navy EP-3 reconnaissance plane and a People’s Liberation Army (PLA) naval F-8 fighter that crashed. After surviving the near-fatal accident, the U.S. crew made an emergency landing of their damaged plane onto the PLA’s Lingshui airfield on Hainan Island, and the PRC detained the 24 crew members for 11 days. Washington and Beijing disagreed over the cause of the accident, the release of the crew and plane, whether Washington would “apologize,” and the PRC’s right to inspect the EP- 3. In the longer term, the incident has implications for the right of U.S. and other nations’ aircraft to fly in international airspace near China. (This CRS Report, first issued on April 20, 2001, includes an update on the later EP-3 recovery.) The incident prompted assessments about PRC leaders, their hardline position, and their claims. While some speculated about PLA dominance, President and Central Military Commission Chairman Jiang Zemin and his diplomats were in the lead, while PLA leaders followed in stance with no more inflammatory rhetoric. -

Emergency Evacuation of Commercial Passenger Aeroplanes Second Edition 2020
JUNE 2020 EMERGENCY EVACUATION OF COMMERCIAL PASSENGER AEROPLANES SECOND EDITION 2020 @aerosociety A specialist paper from the Royal Aeronautical Society www.aerosociety.com About the Royal Aeronautical Society (RAeS) The Royal Aeronautical Society (‘the Society’) is the world’s only professional body and learned society dedicated to the entire aerospace community. Established in 1866 to further the art, science and engineering of aeronautics, the Society has been at the forefront of developments in aerospace ever since. The Society seeks to; (i) promote the highest possible standards in aerospace disciplines; (ii) provide specialist information and act as a central forum for the exchange of ideas; and (iii) play a leading role in influencing opinion on aerospace matters. The Society has a range of specialist interest groups covering all aspects of the aerospace world, from airworthiness and maintenance, unmanned aircraft systems and aerodynamics to avionics and systems, general aviation and air traffic management, to name a few. These groups consider developments in their fields and are instrumental in providing industry-leading expert opinion and evidence from their respective fields. About the Honourable Company of Air Pilots (Incorporating Air Navigators) Who we are The Company was established as a Guild in 1929 in order to ensure that pilots and navigators of the (then) fledgling aviation industry were accepted and regarded as professionals. From the beginning, the Guild was modelled on the lines of the Livery Companies of the City of London, which were originally established to protect the interests and standards of those involved in their respective trades or professions. In 1956, the Guild was formally recognised as a Livery Company. -

ASES Standardization Manual
ASES Standardization Manual Rainier Flight Service LLC, located at Renton Municipal Airport and is owned and operated as: Rainier Flight Service 800 W Perimeter Rd Renton, WA 98057 © 2013 Rainier Flight Service (v 2.0) Page 1 ASES Standardization Manual 1. Takeoffs And Landings ....................................................................................................... 3 1.1 MANEUVER: Normal Takeoff and Climb.................................................................................. 4 1.2 MANEUVER: Normal Approach and Landing ........................................................................... 5 1.3 MANEUVER: Crosswind Takeoff and Climb ............................................................................. 7 1.4 MANEUVER: Crosswind Approach and Landing ....................................................................... 9 1.5 MANEUVER: Glassy Water Takeoff and Climb ....................................................................... 11 1.6 MANEUVER: Glassy Water Approach and Landing ................................................................. 12 1.7 MANEUVER: Rough Water Takeoff and Climb ....................................................................... 14 1.8 MANEUVER: Rough Water Approach and Landing................................................................. 15 1.9 MANEUVER: Confined Area Takeoff and Climb (Straight and Turning) ................................... 17 1.10 MANEUVER: Confined Area Approach and Landing .............................................................. -
WEC Aircraft Use and Safety Handbook
AIRCRAFT USE AND SAFETY HANDBOOK FOR SCIENTISTS AND RESOURCE MANAGERS John C. Simon Peter C. Frederick Kenneth D. Meyer H. Percival Franklin DEVELOPED BY THE © University of Florida 2010 ABOUT THE AUTHORS John Charles Simon is a Research Coordinator for the University of Florida’s South Florida Wading Bird Project. He earned his private pilot’s certificate in 1986 and has flown over 750 hours as a passenger/observer in both fixed- winged and rotary aircraft conducting population and nesting surveys, habitat evaluations, following flights, and radio telemetry. Dr. Peter Frederick is a Research Professor in the University of Florida’s Department of Wildlife Ecology and Conservation. His research on wading birds in the Florida Everglades has used aerial survey techniques extensively and intensively, with over 1,500 hours flown in fixed-winged and rotary aircraft over 25 years. He survived one air crash in a Cessna 172 during the course of that work. Dr. Kenneth D. Meyer is Director of the Avian Research and Conservation Institute and an Associate Professor (Courtesy) in the University of Florida's Department of Wildlife Ecology and Conservation. Since 1981, Dr. Meyer's research on birds has involved fixed-wing and rotary aircraft for radio telemetry, population surveys, roost counts, nest finding, and following flights. Dr. H. Percival Franklin is Courtesy Associate Professor and Unit Leader of the Florida Cooperative Fish and Wildlife Research Unit. Its employees and cooperators, regardless of employment, are bound by strict aircraft training and use regulations of the Department of Interior. Dr Franklin has been a strong proponent of aircraft and other safety issues in the workplace. -
A Combined Inflated Airbed and Additional Booster System
Special Issue - 2018 International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181 ICITMSEE - 2018 Conference Proceedings A Combined Inflated Airbed and Additional Booster System for Emergency Landing 1 2 3 4 Elavarasan. E , Venugopal. M , David Andrews. V , Kamlesh Kumar. M 1Assistant Professor, Department of Mechanical Engineering, Kongunadu College of Engineering and Technology 2Assistant Professor, Department of Mechanical Engineering, Gnanamani College of Technology 3Assistant Professor, Department of Mechanical Engineering, SRM Institute of Science and Technology 4Final year of Mechatronics Engineering, Paavai Engineering College Abstract— The technique has presented for a multi-objective way The second category consists of a simple solid rocket to the aircrafts. This method helps the aircraft to reduce its booster, which is external attached to the aircraft. After the runway length by attaching the identical solid propelled boosters landing gear touch the booster is ignites and produces the at the fuselage section and an airbed is provided during thrust in opposite direction. So, the solid propellant booster Emergency landing. That helps in reducing structural damage acts as a thrust reversal. and life lost. The combinations of these two methods are implemented for safety and performance aspect of an aircraft. This method also eliminates the limitations of ballistic rescue The external booster system is utilized in different military parachute system. It is possible by the combination of these application. The most notable examples is JATO which has an combined system of airbed and identical solid rocket booster additional rocket used during the takeoff and landing of the systems the reaction time of opening of the airbed in fastened by aircraft. -
Natops Landing Signal Officer Manual
THE LANDING NAVAIR 00-80T-104 SIGNAL OFFICER THE LSO WORKSTATION NATOPS NORMAL LANDING SIGNAL PROCEDURES OFFICER MANUAL EMERGENCY PROCEDURES EXTREME WEATHER CONDITION OPERATIONS THIS PUBLICATION SUPERSEDES NAVAIR 00-80T-104 DATED 1 MAY 2007. COMMUNICATIONS NATOPS EVAL, PILOT PERFORMANCE RECS, A/C MISHAP STATEMENTS DISTRIBUTION STATEMENT C — Distribution authorized to U.S. Government Agencies and their contractors to protect publications required for official use or for administrative or operational purposes only, effective (01 May 2009). Other requests for the document shall be referred to COMNAVAIRSYSCOM, ATTN: NATOPS Officer, Code 4.0P, 22244 Cedar Point Rd, BLDG 460, Patuxent River, MD 20670−1163 DESTRUCTION NOTICE — For unclassified, limited documents, destroy by any method that will prevent disclosure of contents or reconstruction of the document. ISSUED BY AUTHORITY OF THE CHIEF OF NAVAL OPERATIONS AND UNDER THE DIRECTION OF THE COMMANDER, NAVAL AIR SYSTEMS COMMAND. INDEX 0800LP1097834 1 (Reverse Blank) 1 MAY 2009 NAVAIR 00-80T-104 DEPARTMENT OF THE NAVY NAVAL AIR SYSTEMS COMMAND RADM WILLIAM A. MOFFETT BUILDING 47123 BUSE ROAD, BLDG 2272 PATUXENT RIVER, MD 20670-1547 1 May 2009 LETTER OF PROMULGATION 1. The Naval Air Training and Operating Procedures Standardization (NATOPS) Program is a positive approach toward improving combat readiness and achieving a substantial reduction in the aircraft mishap rate. Standardization, based on professional knowledge and experience, provides the basis for development of an efficient and sound operational procedure. The standardization program is not planned to stifle individual initiative, but rather to aid the Commanding Officer in increasing the unit’s combat potential without reducing command prestige or responsibility. -

Regulations of the Administrator
Civil Aeronautics Administration U. S. Department of Commerce REGULATIONS OF THE ADMINISTRATOR PART 400—Organization and Functions (Revised effective April 10, 195^) In accordance with the public Infor• responsible to the Under Secretary of Public Law 674. 76th Congress, dated June mation requirements of the Administra• Commerce for Transportation. 29. 1940 (54 Stat. 686) as amended, to tive Procedure Act. the description of the (b) The Civil Aeronautics Administra• provide for the administration of the organization and functions of the Civil tion shall consist of the following or• Washington National Airport. Aeronautics Administration Is revised in Public Law 289, 80th Congress, dated July ganizational units; 30, 1947 (61 Stat. 678) as amended by its entirety to read: (1) Office of the Administrator, which Public Law 311, 81st Congress, dated Oc• SUBPART A—INTRODUCTION includes the: tober 1, 1949 (63 Stat. 700) to expedite the disposition of government surplus Sec. Administrator. 1. Addresses, airports, airport facilities, and equipment, Assistant Administrator for Administration. 2. Inquiries. and to provide for the transfer of com• Assistant Administrator for Program Co• pliance functions with relation to such SUBPART B—ORGANIZATION AND FUNCTIONS ordination. property. Executive Assistant. 11. Organization. (b) The Administrator shall also 12. Delegation or authority. (2) Staff and Program Offices, includ• carry out the power and responsibility 13. General functions. ing: 14. Functions of the Office of tne Adminis• vested in and delegated to the Secretary Genera! Counsel's Office. trator. of Commerce under the Defense Pro• 15. Functions of Start and Program Offices. Aviation Information Office. duction Act of 1950. as amended, with 16.