Chessboard and Chess Piece Recognition with the Support of Neural Networks
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Combinatorics on the Chessboard
Combinatorics on the Chessboard Interactive game: 1. On regular chessboard a rook is placed on a1 (bottom-left corner). Players A and B take alternating turns by moving the rook upwards or to the right by any distance (no left or down movements allowed). Player A makes the rst move, and the winner is whoever rst reaches h8 (top-right corner). Is there a winning strategy for any of the players? Solution: Player B has a winning strategy by keeping the rook on the diagonal. Knight problems based on invariance principle: A knight on a chessboard has a property that it moves by alternating through black and white squares: if it is on a white square, then after 1 move it will land on a black square, and vice versa. Sometimes this is called the chameleon property of the knight. This is related to invariance principle, and can be used in problems, such as: 2. A knight starts randomly moving from a1, and after n moves returns to a1. Prove that n is even. Solution: Note that a1 is a black square. Based on the chameleon property the knight will be on a white square after odd number of moves, and on a black square after even number of moves. Therefore, it can return to a1 only after even number of moves. 3. Is it possible to move a knight from a1 to h8 by visiting each square on the chessboard exactly once? Solution: Since there are 64 squares on the board, a knight would need 63 moves to get from a1 to h8 by visiting each square exactly once. -

A Package to Print Chessboards
chessboard: A package to print chessboards Ulrike Fischer November 1, 2020 Contents 1 Changes 1 2 Introduction 2 2.1 Bugs and errors.....................................3 2.2 Requirements......................................4 2.3 Installation........................................4 2.4 Robustness: using \chessboard in moving arguments..............4 2.5 Setting the options...................................5 2.6 Saving optionlists....................................7 2.7 Naming the board....................................8 2.8 Naming areas of the board...............................8 2.9 FEN: Forsyth-Edwards Notation...........................9 2.10 The main parts of the board..............................9 3 Setting the contents of the board 10 3.1 The maximum number of fields........................... 10 1 3.2 Filling with the package skak ............................. 11 3.3 Clearing......................................... 12 3.4 Adding single pieces.................................. 12 3.5 Adding FEN-positions................................. 13 3.6 Saving positions..................................... 15 3.7 Getting the positions of pieces............................ 16 3.8 Using saved and stored games............................ 17 3.9 Restoring the running game.............................. 17 3.10 Changing the input language............................. 18 4 The look of the board 19 4.1 Units for lengths..................................... 19 4.2 Some words about box sizes.............................. 19 4.3 Margins......................................... -

53Rd WORLD CONGRESS of CHESS COMPOSITION Crete, Greece, 16-23 October 2010
53rd WORLD CONGRESS OF CHESS COMPOSITION Crete, Greece, 16-23 October 2010 53rd World Congress of Chess Composition 34th World Chess Solving Championship Crete, Greece, 16–23 October 2010 Congress Programme Sat 16.10 Sun 17.10 Mon 18.10 Tue 19.10 Wed 20.10 Thu 21.10 Fri 22.10 Sat 23.10 ICCU Open WCSC WCSC Excursion Registration Closing Morning Solving 1st day 2nd day and Free time Session 09.30 09.30 09.30 free time 09.30 ICCU ICCU ICCU ICCU Opening Sub- Prize Giving Afternoon Session Session Elections Session committees 14.00 15.00 15.00 17.00 Arrival 14.00 Departure Captains' meeting Open Quick Open 18.00 Solving Solving Closing Lectures Fairy Evening "Machine Show Banquet 20.30 Solving Quick Gun" 21.00 19.30 20.30 Composing 21.00 20.30 WCCC 2010 website: http://www.chessfed.gr/wccc2010 CONGRESS PARTICIPANTS Ilham Aliev Azerbaijan Stephen Rothwell Germany Araz Almammadov Azerbaijan Rainer Staudte Germany Ramil Javadov Azerbaijan Axel Steinbrink Germany Agshin Masimov Azerbaijan Boris Tummes Germany Lutfiyar Rustamov Azerbaijan Arno Zude Germany Aleksandr Bulavka Belarus Paul Bancroft Great Britain Liubou Sihnevich Belarus Fiona Crow Great Britain Mikalai Sihnevich Belarus Stewart Crow Great Britain Viktor Zaitsev Belarus David Friedgood Great Britain Eddy van Beers Belgium Isabel Hardie Great Britain Marcel van Herck Belgium Sally Lewis Great Britain Andy Ooms Belgium Tony Lewis Great Britain Luc Palmans Belgium Michael McDowell Great Britain Ward Stoffelen Belgium Colin McNab Great Britain Fadil Abdurahmanović Bosnia-Hercegovina Jonathan -
IVAN II Operating Manual Model 712
IVAN II Operating Manual Model 712 Congratulations on your purchase of Excalibur Electronics’ IVAN! You’ve purchased both your own personal chess trainer and a partner who’s always ready for a game—and who can improve as you do! Talking and audio sounds add anoth- Play a Game Right Away er dimension to your IVAN computer for After you have installed the batteries, the increased enjoyment and play value. display will show the chess board with all the pieces on their starting squares. Place Find the Pieces the plastic chess pieces on their start Turn Ivan over carefully with his chess- squares using the LCD screen as a guide. board facedown. Find the door marked The dot-matrix display will show “PIECE COMPARTMENT DOOR”. 01CHESS. This indicates you are at the Open it and remove the chess pieces. first move of the game and ready to play Replace the door and set the pieces aside chess. for now. Unless you instruct it otherwise, IVAN gives you the White pieces—the ones at Install the Batteries the bottom of the board. White always With Ivan facedown, find the door moves first. You’re ready to play! marked “BATTERY DOOR’. Open it and insert four (4) fresh, alkaline AA batteries Making your move in the battery holder. Note the arrange- Besides deciding on a good move, you ment of the batteries called for by the dia- have to move the piece in a way that Ivan gram in the holder. Make sure that the will recognize what's been played. Think positive tip of each battery matches up of communicating your move as a two- with the + sign in the battery compart- step process--registering the FROM ment so that polarity will be correct. -
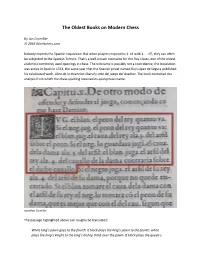
The Oldest Books on Modern Chess
The Oldest Books on Modern Chess By Jon Crumiller © 2016 Worldchess.com Nobody expects the Spanish Inquisition. But when players respond to 1. e4 with 1. … e5, they can often be subjected to the Spanish Torture. That’s a well-known nickname for the Ruy López, one of the oldest and most commonly used openings in chess. The nickname is possibly not a coincidence; the Inquisition was active in Spain in 1561, the same year that the Spanish priest named Ruy López de Segura published his celebrated work, Libro de la Invencion liberal y Arte del juego del Axedrez. The book contained the analysis from which the chess opening received its eponymous name. Jonathan Crumiller The passage highlighted above can roughly be translated: White king’s pawn goes to the fourth. If black plays the king’s pawn to the fourth: white plays the king’s knight to the king’s bishop third, over the pawn. If black plays the queen’s knight to queen’s bishop third: white plays the king’s bishop to the fourth square of the contrary queen’s knight, opposed to that knight. Or in our modern chess language: 1. e4, e5 2. Nf3, Nc6 3. Bb5. Jonathan Crumiller On the right is how the Ruy López opening would have looked four centuries ago with a standard chess set and board in Spain. This Spanish chess set is one of my oldest complete sets (along with a companion wooden set of the same era). Jonathan Crumiller Here is the Ruy López as seen with that companion set displayed on a Spanish chessboard, also from the 1600’s. -

Proposal to Encode Heterodox Chess Symbols in the UCS Source: Garth Wallace Status: Individual Contribution Date: 2016-10-25
Title: Proposal to Encode Heterodox Chess Symbols in the UCS Source: Garth Wallace Status: Individual Contribution Date: 2016-10-25 Introduction The UCS contains symbols for the game of chess in the Miscellaneous Symbols block. These are used in figurine notation, a common variation on algebraic notation in which pieces are represented in running text using the same symbols as are found in diagrams. While the symbols already encoded in Unicode are sufficient for use in the orthodox game, they are insufficient for many chess problems and variant games, which make use of extended sets. 1. Fairy chess problems The presentation of chess positions as puzzles to be solved predates the existence of the modern game, dating back to the mansūbāt composed for shatranj, the Muslim predecessor of chess. In modern chess problems, a position is provided along with a stipulation such as “white to move and mate in two”, and the solver is tasked with finding a move (called a “key”) that satisfies the stipulation regardless of a hypothetical opposing player’s moves in response. These solutions are given in the same notation as lines of play in over-the-board games: typically algebraic notation, using abbreviations for the names of pieces, or figurine algebraic notation. Problem composers have not limited themselves to the materials of the conventional game, but have experimented with different board sizes and geometries, altered rules, goals other than checkmate, and different pieces. Problems that diverge from the standard game comprise a genre called “fairy chess”. Thomas Rayner Dawson, known as the “father of fairy chess”, pop- ularized the genre in the early 20th century. -

Finding Checkmate in N Moves in Chess Using Backtracking And
Finding Checkmate in N moves in Chess using Backtracking and Depth Limited Search Algorithm Moch. Nafkhan Alzamzami 13518132 Informatics Engineering School of Electrical Engineering and Informatics Institute Technology of Bandung, Jalan Ganesha 10 Bandung [email protected] [email protected] Abstract—There have been many checkmate potentials that has pieces of a dark color. There are rules about how pieces players seem to miss. Players have been training for finding move, and about taking the opponent's pieces off the board. checkmates through chess checkmate puzzles. Such problems can The player with white pieces always makes the first move.[4] be solved using a simple depth-limited search and backtracking Because of this, White has a small advantage, and wins more algorithm with legal moves as the searching paths. often than Black in tournament games.[5][6] Keywords—chess; checkmate; depth-limited search; Chess is played on a square board divided into eight rows backtracking; graph; of squares called ranks and eight columns called files, with a dark square in each player's lower left corner.[8] This is I. INTRODUCTION altogether 64 squares. The colors of the squares are laid out in There have been many checkmate potentials that players a checker (chequer) pattern in light and dark squares. To make seem to miss. Players have been training for finding speaking and writing about chess easy, each square has a checkmates through chess checkmate puzzles. Such problems name. Each rank has a number from 1 to 8, and each file a can be solved using a simple depth-limited search and letter from a to h. -
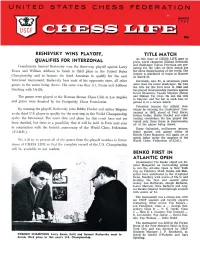
Reshevsky Wins Playoff, Qualifies for Interzonal Title Match Benko First in Atlantic Open
RESHEVSKY WINS PLAYOFF, TITLE MATCH As this issue of CHESS LIFE goes to QUALIFIES FOR INTERZONAL press, world champion Mikhail Botvinnik and challenger Tigran Petrosian are pre Grandmaster Samuel Reshevsky won the three-way playoff against Larry paring for the start of their match for Evans and William Addison to finish in third place in the United States the chess championship of the world. The contest is scheduled to begin in Moscow Championship and to become the third American to qualify for the next on March 21. Interzonal tournament. Reshevsky beat each of his opponents once, all other Botvinnik, now 51, is seventeen years games in the series being drawn. IIis score was thus 3-1, Evans and Addison older than his latest challenger. He won the title for the first time in 1948 and finishing with 1 %-2lh. has played championship matches against David Bronstein, Vassily Smyslov (three) The games wcre played at the I·lerman Steiner Chess Club in Los Angeles and Mikhail Tal (two). He lost the tiUe to Smyslov and Tal but in each case re and prizes were donated by the Piatigorsky Chess Foundation. gained it in a return match. Petrosian became the official chal By winning the playoff, Heshevsky joins Bobby Fischer and Arthur Bisguier lenger by winning the Candidates' Tour as the third U.S. player to qualify for the next step in the World Championship nament in 1962, ahead of Paul Keres, Ewfim Geller, Bobby Fischer and other cycle ; the InterzonaL The exact date and place for this event havc not yet leading contenders. -

Origins of Chess Protochess, 400 B.C
Origins of Chess Protochess, 400 B.C. to 400 A.D. by G. Ferlito and A. Sanvito FROM: The Pergamon Chess Monthly September 1990 Volume 55 No. 6 The game of chess, as we know it, emerged in the North West of ancient India around 600 A.D. (1) According to some scholars, the game of chess reached Persia at the time of King Khusrau Nushirwan (531/578 A.D.), though some others suggest a later date around the time of King Khusrau II Parwiz (590/628 A.D.) (2) Reading from the old texts written in Pahlavic, the game was originally known as "chatrang". With the invasion of Persia by the Arabs (634/651 A.D.), the game’s name became "shatranj" because the phonetic sounds of "ch" and "g" do not exist in Arabic language. The game spread towards the Mediterranean coast of Africa with the Islamic wave of military expansion and then crossed over to Europe. However, other alternative routes to some parts of Europe may have been used by other populations who were playing the game. At the moment, this "Indian, Persian, Islamic" theory on the origin of the game is accepted by the majority of scholars, though it is fair to mention here the work of J. Needham and others who suggested that the historical chess of seventh century India was descended from a divinatory game (or ritual) in China. (3) On chess theories, the most exhaustive account founded on deep learning and many years’ studies is the A History of Chess by the English scholar, H.J.R. -

CHESS How to Play Chess: Rules and Basics
CHESS By Mind Games How to Play Chess: Rules and Basics It's never too late to learn how to play chess - the most popular game in the world! Learning the rules of chess is easy: Step 1. How to Setup the Chessboard At the beginning of the game the chessboard is laid out so that each player has the white (or light) color square in the bottom right-hand side. The chess pieces are then arranged the same way each time. The second row (or rank) is filled with pawns. The rooks go in the corners, then the knights next to them, followed by the bishops, and finally the queen, who always goes on her own matching color (white queen on white, black queen on black), and the king on the remaining square. Step 2. How the Chess Pieces Move Each of the 6 different kinds of pieces moves differently. Pieces cannot move through other pieces (though the knight can jump over other pieces), and can never move onto a square with one of their own pieces. However, they can be moved to take the place of an opponent's piece which is then captured. Pieces are generally moved into positions where they can capture other pieces (by landing on their square and then replacing them), defend their own pieces in case of capture, or control important squares in the game. How to Move the King in Chess The king is the most important piece, but is one of the weakest. The king can only move one square in any direction - up, down, to the sides, and diagonally. -

Instructions and Solutions Your Goal: Capture the Chess Pieces Until Only One Piece Remains on the Challenge Card
STRATEGIC SKILL BUILDING GAME Instructions and Solutions Your Goal: Capture the chess pieces until only one piece remains on the challenge card. STRATEGIC SKILL BUILDING GAME ThinkFun’s Brain Fitness games are designed as a fun way to help you exercise your brain. The 80 challenges will stretch your mental muscles and strengthen speed, focus, and memory. We recommend Setup: that you start with the beginner level and work through the challenges progressively. Just 15 minutes of play a day will reduce stress and Choose a challenge card and cover the chess piece icons with the provide a good brain workout. You’re on your way to a healthier brain! matching chess pieces. Chess has long been known as the world’s deepest thinking game. To Play: ® Solitaire Chess combines the rules of traditional chess and peg 1. Move the chess pieces according to the movement rules solitaire to bring you a delightful and vigorous brain workout! It’s okay (pages 6-7)*. Each move must result in a captured piece. if you’ve never played chess before, this is an inviting way to learn some chess playing strategies or build the skills that you already have! 2. If you are left with two or more pieces on the challenge card, reset and try again. Includes: 3. When there is only one piece remaining–YOU WIN! • 1 Booklet with 80 Challenges • 10 Chess Pieces Note: If you are stuck, reference the solutions on pages 8 to 11. • 1 Booklet with Instructions and Solutions *Movements are the same as in standard chess. -
![[Math.HO] 4 Oct 2007 Computer Analysis of the Two Versions](https://docslib.b-cdn.net/cover/3027/math-ho-4-oct-2007-computer-analysis-of-the-two-versions-1983027.webp)
[Math.HO] 4 Oct 2007 Computer Analysis of the Two Versions
Computer analysis of the two versions of Byzantine chess Anatole Khalfine and Ed Troyan University of Geneva, 24 Rue de General-Dufour, Geneva, GE-1211, Academy for Management of Innovations, 16a Novobasmannaya Street, Moscow, 107078 e-mail: [email protected] July 7, 2021 Abstract Byzantine chess is the variant of chess played on the circular board. In the Byzantine Empire of 11-15 CE it was known in two versions: the regular and the symmetric version. The difference between them: in the latter version the white queen is placed on dark square. However, the computer analysis reveals the effect of this ’perturbation’ as well as the basis of the best winning strategy in both versions. arXiv:math/0701598v2 [math.HO] 4 Oct 2007 1 Introduction Byzantine chess [1], invented about 1000 year ago, is one of the most inter- esting variations of the original chess game Shatranj. It was very popular in Byzantium since 10 CE A.D. (and possible created there). Princess Anna Comnena [2] tells that the emperor Alexius Comnenus played ’Zatrikion’ - so Byzantine scholars called this game. Now it is known under the name of Byzantine chess. 1 Zatrikion or Byzantine chess is the first known attempt to play on the circular board instead of rectangular. The board is made up of four concentric rings with 16 squares (spaces) per ring giving a total of 64 - the same as in the standard 8x8 chessboard. It also contains the same pieces as its parent game - most of the pieces having almost the same moves. In other words divide the normal chessboard in two halves and make a closed round strip [1].