Title of [Thesis, Dissertation]
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

I-11 Coalition for Sonoran Desert Protection Letter to ADOT, July 2016
July 8, 2016 Interstate 11 Tier 1 EIS Study Team c/o ADOT Communications 1655 W. Jackson St., MD 126F Phoenix, AZ 85007 RE: Scoping Comments on the Interstate 11 Tier 1 Environmental Impact Statement, Nogales to Wickenburg To Whom It May Concern: The Coalition for Sonoran Desert Protection appreciates the opportunity to provide scoping comments for the Interstate 11 Tier 1 Environmental Impact Statement (EIS), Nogales to Wickenburg. We submit the enclosed comments on behalf of the Coalition for Sonoran Desert Protection, founded in 1998 and comprised of 34 environmental and community groups working in Pima County, Arizona. Our mission is to achieve the long-term conservation of biological diversity and ecological function of the Sonoran Desert through comprehensive land-use planning, with primary emphasis on Pima County’s Sonoran Desert Conservation Plan. We achieve this mission by advocating for: 1) protecting and conserving Pima County’s most biologically rich areas, 2) directing development to appropriate land, and 3) requiring appropriate mitigation for impacts to habitat and wildlife species. In summary, our scoping comments highlight the need for further evaluation of the purpose and need for this project and major environmental impacts that should be considered statewide and particularly in Pima County as this study area is evaluated. Specifically, potential environmental impacts in Pima County include impacts to federal lands such as Saguaro National Park, Ironwood Forest National Monument, and the Bureau of Reclamation’s Central -

Final Report, Volume 1 | I-19: San Xavier Road to Interstate 10 Study
FINAL DESIGN CONCEPT REPORT (Volume 1 of 2) I-19 San Xavier Road to I-10 Project No. 019 PM 057 H5105 01L Federal Aid Reference Number: 019-A (014) ADOT Contract No. 04-34 August 23, 2012 Prepared For the Arizona Department of Transportation Tucson District – Pima County PREPARED BY: 1860 East River Road, Suite 300 Tucson, Arizona 85718 FINAL DESIGN CONCEPT REPORT I-19 San Xavier Road to I-10 Project No. 019 PM 057 H5105 01L Federal Aid Reference Number: 019-A (014) ADOT Contract No. 04-34 August 23, 2012 Prepared For the Arizona Department of Transportation Tucson District – Pima County Prepared By: 1860 East River Road, Suite 300 Tucson, Arizona 85718 Final Design Concept Report I-19 San Xavier Road to I-10 1.5 Agency and Public Scoping ....................................................................................... 26 Table of Contents 1.5.1 Agency Scoping .................................................................................................. 26 1.5.2 Public Scoping .................................................................................................... 27 Executive Summary ............................................................................................................................. 1 2.0 Traffic And Crash Data .............................................................................................................. 29 Environmental Mitigation Measures.................................................................................................... 8 2.1 2001 Conditions ....................................................................................................... -

Route Restriction Information: Table 4
R17-6-412, Table 4 – Updated April 06, 2021 Table 4. Permanent Highway Restrictions, Requirements, Conditions, and Allowances For “Transport Subject To” requirements see end of document. Route Restriction Location Transport Subject to: Height Length Width Weight (in lbs) (MP = Milepost) Escort requirements: F = front escort, R = rear escort, F/R = front and rear escort, and LE = law enforcement escort Interstate 8 MP 0.00 (California State R17-6-405; R17-6-406; Over 14’ - 16’ = R Line) to MP 21.06 (Dome R17-6-408; R17-6-409 Valley Road TI) Interstate 8 MP 21.06 Westbound (Dome R17-6-405; R17-6-406; 15’ 11” Over 14’ - 16’ = R Valley Road TI Underpass - R17-6-408; R17-6-409 Structure 1325) Interstate 8 MP 21.06 (Dome Valley R17-6-405; R17-6-406; Over 14’ - 16’ = R Road TI) to MP 30.80 R17-6-408; R17-6-409 (Avenue 29E - Wellton TI) Interstate 8 MP 30.80 Westbound R17-6-405; R17-6-406; 15’ 11” Over 14’ - 16’ = R (Avenue 29E - Wellton R17-6-408; R17-6-409 Underpass - Structure 1332) Interstate 8 MP 30.80 (Avenue 29E - R17-6-405; R17-6-406; Over 14’ - 16’ = R Wellton TI) to MP 144.55 R17-6-408; R17-6-409 (Vekol Valley Road TI) Interstate 8 MP 144.55 (Vekol Valley R17-6-405; R17-6-406; 15’ 11” Over 14’ - 16’ = R Road Underpass - Structure R17-6-408; R17-6-409 550) Interstate 8 MP 144.55 (Vekol Valley R17-6-405; R17-6-406; Over 14’ - 16’ = R Road TI) to MP 151.70 R17-6-408; R17-6-409 (Junction SR 84) Interstate 8 MP 151.70 Eastbound R17-6-405; R17-6-406; 15’ 10” Over 14’ - 16’ = R (Junction SR 84 Underpass - R17-6-408; R17-6-409 Structure 1063) -

Senate Concurrent Resolution 1012
Senate Engrossed State of Arizona Senate Fifty-second Legislature First Regular Session 2015 SENATE CONCURRENT RESOLUTION 1012 A CONCURRENT RESOLUTION SUPPORTING THE ARIZONA DEPARTMENT OF TRANSPORTATION'S COMMENTS TO THE FEDERAL DEPARTMENT OF TRANSPORTATION IN RESPONSE TO THE PROPOSED DESIGNATION OF THE PRIMARY FREIGHT NETWORK. (TEXT OF BILL BEGINS ON NEXT PAGE) - i - S.C.R. 1012 1 Whereas, the Arizona Department of Transportation (ADOT) submitted 2 comments to the federal Department of Transportation (DOT) in response to the 3 proposed designation of the Primary Freight Network (PFN) that highlighted 4 problems with the proposal and provided recommendations for improvement; and 5 Whereas, the federal legislation "Moving Ahead for Progress in the 21st 6 Century Act" (MAP-21) calls for the United States Secretary of Transportation 7 to designate up to 27,000 miles on existing interstate and other roadways, 8 with a possible addition of 3,000 miles in the future, as a PFN to help 9 states strategically direct resources toward improving freight movement; and 10 Whereas, the Federal Register notice identifies more than 41,000 miles 11 of comprehensive, connected roadway that a Federal Highway Administration 12 (FHWA) analysis shows would be necessary to transport goods efficiently on 13 highways throughout the nation to make up the PFN; and 14 Whereas, the PFN proposal is based on the origins and destination of 15 freight movement, shipment tonnage and values, truck traffic volumes and 16 population; and 17 Whereas, under MAP-21, the PFN -

Lesser-Known Areas the National Parks: Lesser-Known Areas
The National Parks: Lesser-Known Areas The National Parks: Lesser-Known Areas Produced by the Office of Public Affairs and the Division of Publications National Park Service U.S. Department of the Interior Washington, D.C. 1985 National Park Service U. S. Department of the Interior As the nation's principal ment of life through outdoor conservation agency, the recreation. The Department Department of the Interior assesses our energy and has responsibility for most of mineral resources and works our nationally owned public to assure that their develop lands and natural resources. ment is in the best interest of This includes fostering the all our people. The Depart wisest use of our land and ment also has a major respon- water resources, protecting siblity for American Indian our fish and wildlife, preserv reservation communities and ing the environmental and for people who live in island cultural values of our national territories under United parks and historical places, States administration. and providing for the enjoy For sale by the Superintendent of Documents U.S. Government Printing Office, Washington, DC 20402 Contents Introduction 4 Maps of the National Park System 6 National Park Service Regional Offices 9 Lesser-Known Areas Listed by State 10 Index 48 Lesser-Known Parks: Doorways to Adventure Few travelers are familiar with most parks described here. Many are located away from principal highways or are relatively new to the National Park Sys tem. And most, but not all, are smaller than the more popular parks. Yet these sites contain nationally significant sce nic and cultural resources, many of com parable quality to the more famous parks. -
03 Page F-304
Page F-300 Page F-301 Page F-302 Page Page F-303 Page F-304 Online Survey Responses (Summary) Page F-305 I-11 Survey Monkey Summary of Responses: Summer 2016 Public Scoping Question 1 Please tell us what problems you experience today, or anticipate in the future, related to transportation in the Corridor Study Area that the I-11 project could address. Please rank the following in order of importance to you. (1= highest ranking [most important], 5=lowest ranking [least important]). Relieve local congestion, improve travel time and 134 reliability (reduce how long a trip will take or ensure 67 certainty of travel time) 61 46 173 Relieve regional congestion, improve travel time and 139 reliability (between Southern and Northwestern Arizona) 75 68 41 158 Improve freight travel and reliability, reducing 125 bottlenecks on existing highways 72 72 50 158 Improve local access to communities and resources 73 (parks, recreation, and tourism) 56 98 73 173 Need for a different transportation mode than what 149 exists today 53 49 49 172 Support homeland security and national defense needs 73 34 81 58 226 0 50 100 150 200 250 1 (most important) 2 3 4 5 (least important) Other desirable outcomes (open-ended response): [responses not edited for spelling, grammar, or capitalization] Freeze construction of new homes until the current commuting demands are addressed and solved. Minimal disruption of the desert environment especially in the area of the Arizona Sonoran Desert Museum and the Saguaro National Park.. Protecting what is left of the southern Arizona natural world. -

Arizona Transportation History
Arizona Transportation History Final Report 660 December 2011 Arizona Department of Transportation Research Center DISCLAIMER The contents of this report reflect the views of the authors who are responsible for the facts and the accuracy of the data presented herein. The contents do not necessarily reflect the official views or policies of the Arizona Department of Transportation or the Federal Highway Administration. This report does not constitute a standard, specification, or regulation. Trade or manufacturers' names which may appear herein are cited only because they are considered essential to the objectives of the report. The U.S. Government and the State of Arizona do not endorse products or manufacturers. Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. FHWA-AZ-11-660 4. Title and Subtitle 5. Report Date December 2011 ARIZONA TRANSPORTATION HISTORY 6. Performing Organization Code 7. Author 8. Performing Organization Report No. Mark E. Pry, Ph.D. and Fred Andersen 9. Performing Organization Name and Address 10. Work Unit No. History Plus 315 E. Balboa Dr. 11. Contract or Grant No. Tempe, AZ 85282 SPR-PL-1(173)-655 12. Sponsoring Agency Name and Address 13.Type of Report & Period Covered ARIZONA DEPARTMENT OF TRANSPORTATION 206 S. 17TH AVENUE PHOENIX, ARIZONA 85007 14. Sponsoring Agency Code Project Manager: Steven Rost, Ph.D. 15. Supplementary Notes Prepared in cooperation with the U.S. Department of Transportation, Federal Highway Administration 16. Abstract The Arizona transportation history project was conceived in anticipation of Arizona’s centennial, which will be celebrated in 2012. Following approval of the Arizona Centennial Plan in 2007, the Arizona Department of Transportation (ADOT) recognized that the centennial celebration would present an opportunity to inform Arizonans of the crucial role that transportation has played in the growth and development of the state. -

LCSH Section I
I(f) inhibitors I-215 (Salt Lake City, Utah) Interessengemeinschaft Farbenindustrie USE If inhibitors USE Interstate 215 (Salt Lake City, Utah) Aktiengesellschaft Trial, Nuremberg, I & M Canal National Heritage Corridor (Ill.) I-225 (Colo.) Germany, 1947-1948 USE Illinois and Michigan Canal National Heritage USE Interstate 225 (Colo.) Subsequent proceedings, Nuremberg War Corridor (Ill.) I-244 (Tulsa, Okla.) Crime Trials, case no. 6 I & M Canal State Trail (Ill.) USE Interstate 244 (Tulsa, Okla.) BT Nuremberg War Crime Trials, Nuremberg, USE Illinois and Michigan Canal State Trail (Ill.) I-255 (Ill. and Mo.) Germany, 1946-1949 I-5 USE Interstate 255 (Ill. and Mo.) I-H-3 (Hawaii) USE Interstate 5 I-270 (Ill. and Mo. : Proposed) USE Interstate H-3 (Hawaii) I-8 (Ariz. and Calif.) USE Interstate 255 (Ill. and Mo.) I-hadja (African people) USE Interstate 8 (Ariz. and Calif.) I-270 (Md.) USE Kasanga (African people) I-10 USE Interstate 270 (Md.) I Ho Yüan (Beijing, China) USE Interstate 10 I-278 (N.J. and N.Y.) USE Yihe Yuan (Beijing, China) I-15 USE Interstate 278 (N.J. and N.Y.) I Ho Yüan (Peking, China) USE Interstate 15 I-291 (Conn.) USE Yihe Yuan (Beijing, China) I-15 (Fighter plane) USE Interstate 291 (Conn.) I-hsing ware USE Polikarpov I-15 (Fighter plane) I-394 (Minn.) USE Yixing ware I-16 (Fighter plane) USE Interstate 394 (Minn.) I-K'a-wan Hsi (Taiwan) USE Polikarpov I-16 (Fighter plane) I-395 (Baltimore, Md.) USE Qijiawan River (Taiwan) I-17 USE Interstate 395 (Baltimore, Md.) I-Kiribati (May Subd Geog) USE Interstate 17 I-405 (Wash.) UF Gilbertese I-19 (Ariz.) USE Interstate 405 (Wash.) BT Ethnology—Kiribati USE Interstate 19 (Ariz.) I-470 (Ohio and W. -

Interstate Methodology and Data Everquote Analyzed Interstate
Interstate Methodology and Data EverQuote analyzed interstate fatalities using raw data from the National Highway Traffic Safety Administration Fatality Analysis Report System from the last six years (2010–2015) and found fatality rates based on the highway lengths. We also compared that to data from EverQuote’s safe-driving app, EverDrive. That data represents over 6 million trips and 80 million miles of driving. Phone use is measured by a driver’s phone motion while driving. While it’s difficult to say for sure what impacts these crashes, there are some commonalities between the most lethal interstates, including high traffic volume, risky driving habits and a lack of distracted driving legislation. Distracted driving fatalities increased 8.8% in 2015 and distraction is believed to be responsible for 10% of all fatal crashes. For the first six months of 2016, traffic fatalities were also up 10.4% compared to the first half of last year. EverDrive data shows that US drivers are distracted by their phones on 31% of all drives: ● 11% of drives have a distraction of one minute or longer while driving in a moving vehicle ● 29% of distractions occur at speeds over 56 mph The average number of times per trip that drivers use their phones nationwide is 1.1. Drivers are, on average, driving .4 miles distracted every 11 miles. You can find that information in our “Confused State of Distracted Driving Report” and Infographic Florida: Three of the most dangerous interstate highways run through the state of Florida (I-4, I-95, I-10). Our EverDrive data found that Florida drivers use their phone on average 1.4 phone uses per trip and the state ranks 2nd worst nationally for phone use while driving. -

Arizona State Freight Plan
Arizona State Freight Plan This document is Arizona’s five-year State Freight Plan and fulfills the federal requirements for state freight plans embodied in the Fixing America’s Surface Transportation (FAST) Act. This Freight Plan, together with a series of technical working papers that informed development of the Freight Plan, also provides the Arizona Department of Transportation (ADOT) with a base of decision making knowledge and strategies to increase the prominence of freight in ADOT planning and programming. Acknowledgements ADOT thanks an outstanding CPCS (CPCS Transcom Inc.) team for its exemplary efforts in producing this Freight Plan. ADOT also expresses gratitude to the Technical Advisory Committee (TAC) and Freight Advisory Committee (FAC) for valuable advice throughout the development of the plan. Michael Demers, though no longer employed at ADOT, is acknowledged for managing the Plan developed for ADOT, while he served as ADOT Freight Planner. Heidi Yaqub, ADOT’s current Freight Program Manager is also recognized for her efforts in completing the Final Plan document. The Arizona State Freight Plan was prepared under the direction of the Arizona Department of Transportation (ADOT) by: CPCS In association with: HDR Engineering, Inc. American Transportation Research Institute, Inc. Elliott D. Pollack & Company Dr. Chris Caplice (MIT) Plan*ET Communities PLLC (Leslie Dornfeld, FAICP) Gill V. Hicks and Associates, Inc. Contact Questions and comments on this plan can be directed to: Charla Glendening, AICP Assistant Manager of Planning and Programming 602-712-7376 www.azdot.gov FINAL | Arizona State Freight Plan Table of Contents 1 Introduction ............................................................................................................................... 1 Purpose of the Freight Plan ...................................................................................................... 1 The Economic Context for the Arizona State Freight Plan ...................................................... -

Nevada Truck Parking Implementation Plan Task 4: Draft Needs Assessment – Truck Parking Supply
Nevada Truck Parking Implementation Plan Task 4: Draft Needs Assessment – Truck Parking Supply prepared for prepared by Nevada Department Cambridge Systematics, Inc. with of Transportation American Transportation Research Institute Horrocks Engineers Silver State Traffic Data Collection April 15, 2019 www.camsys.com draft report Nevada Truck Parking Implementation Plan Task 4: Draft Needs Assessment – Truck Parking Supply prepared for Nevada Department of Transportation prepared by Cambridge Systematics, Inc. 515 S. Figueroa Street, Suite 1975 Los Angeles, CA 90071 with American Transportation Research Institute Horrocks Engineers Silver State Traffic Data Collection date April 15, 2019 Nevada Truck Parking Implementation Plan Table of Contents 1.0 Introduction ........................................................................................................................................ 1-1 2.0 Parking Attributes .............................................................................................................................. 2-3 2.1 Authorized and Unauthorized .................................................................................................... 2-3 2.2 Paved and Unpaved .................................................................................................................. 2-3 2.3 Marked and Unmarked .............................................................................................................. 2-4 2.4 Private and Public ..................................................................................................................... -
I-19 Frontage Roads Study Area 94 Appendix C Cultural Resources Database Search Results
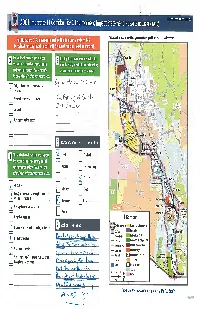
II--1199 FFrroonnttaaggee RRooaaddss SSttuuddyy Task Assignment TPD 01-08 Contract # T0449P001 PGKG 3120 Working Paper No. 1 – Existing and Future Conditions Prepared by: January, 2008 091374019 Copyright © 2007, Kimley-Horn and Associates, Inc. TABLE OF CONTENTS WORKING PAPER 1 - EXISTING AND FUTURE CONDITIONS 1. INTRODUCTION ...................................................................................................................1 1.1 Study Purpose..............................................................................................................1 1.2 Study Area...................................................................................................................1 1.3 Purpose of Working Paper No. 1................................................................................2 2. REVIEW OF PLANS, STUDIES, AND PROGRAMMING INFORMATION ..................................5 2.1 Studies and Plans.........................................................................................................5 2.1.1 Interstate 19 Corridor Study, I-10 to Pima / Santa Cruz County Line, Corridor Report and General Plan, Kimley-Horn and Associates, October 2003.................................5 2.1.2 City of Nogales, Unified Nogales / Santa Cruz County Transportation 2000 Plan, December 2000 ....................................................................................................................7 2.1.3 City of Nogales, North-South / East-West Interconnectors and Frontage Roads Feasibility Analysis, January 2000.......................................................................................7