Underwater Breathing: the Mechanics of Plastron Respiration
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RECORDS of the HAWAII BIOLOGICAL SURVEY for 1995 Part 2: Notes1
RECORDS OF THE HAWAII BIOLOGICAL SURVEY FOR 1995 Part 2: Notes1 This is the second of two parts to the Records of the Hawaii Biological Survey for 1995 and contains the notes on Hawaiian species of plants and animals including new state and island records, range extensions, and other information. Larger, more compre- hensive treatments and papers describing new taxa are treated in the first part of this Records [Bishop Museum Occasional Papers 45]. New Hawaiian Pest Plant Records for 1995 PATRICK CONANT (Hawaii Dept. of Agriculture, Plant Pest Control Branch, 1428 S King St, Honolulu, HI 96814) Fabaceae Ulex europaeus L. New island record On 6 October 1995, Hawaii Department of Land and Natural Resources, Division of Forestry and Wildlife employee C. Joao submitted an unusual plant he found while work- ing in the Molokai Forest Reserve. The plant was identified as U. europaeus and con- firmed by a Hawaii Department of Agriculture (HDOA) nox-A survey of the site on 9 October revealed an infestation of ca. 19 m2 at about 457 m elevation in the Kamiloa Distr., ca. 6.2 km above Kamehameha Highway. Distribution in Wagner et al. (1990, Manual of the flowering plants of Hawai‘i, p. 716) listed as Maui and Hawaii. Material examined: MOLOKAI: Molokai Forest Reserve, 4 Dec 1995, Guy Nagai s.n. (BISH). Melastomataceae Miconia calvescens DC. New island record, range extensions On 11 October, a student submitted a leaf specimen from the Wailua Houselots area on Kauai to PPC technician A. Bell, who had the specimen confirmed by David Lorence of the National Tropical Botanical Garden as being M. -
Hundreds of Species of Aquatic Macroinvertebrates Live in Illinois In
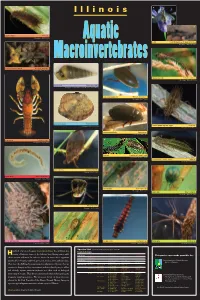
Illinois A B aquatic sowbug Asellus sp. Photograph © Paul P.Tinerella AAqquuaattiicc mayfly A. adult Hexagenia sp.; B. nymph Isonychia sp. MMaaccrrooiinnvveerrtteebbrraatteess Photographs © Michael R. Jeffords northern clearwater crayfish Orconectes propinquus Photograph © Michael R. Jeffords ruby spot damselfly Hetaerina americana Photograph © Michael R. Jeffords aquatic snail Pleurocera acutum Photograph © Jochen Gerber,The Field Museum of Natural History predaceous diving beetle Dytiscus circumcinctus Photograph © Paul P.Tinerella monkeyface mussel Quadrula metanevra common skimmer dragonfly - nymph Libellula sp. Photograph © Kevin S. Cummings Photograph © Paul P.Tinerella water scavenger beetle Hydrochara sp. Photograph © Steve J.Taylor devil crayfish Cambarus diogenes A B Photograph © ChristopherTaylor dobsonfly Corydalus sp. A. larva; B. adult Photographs © Michael R. Jeffords common darner dragonfly - nymph Aeshna sp. Photograph © Paul P.Tinerella giant water bug Belostoma lutarium Photograph © Paul P.Tinerella aquatic worm Slavina appendiculata Photograph © Mark J. Wetzel water boatman Trichocorixa calva Photograph © Paul P.Tinerella aquatic mite Order Prostigmata Photograph © Michael R. Jeffords backswimmer Notonecta irrorata Photograph © Paul P.Tinerella leech - adult and young Class Hirudinea pygmy backswimmer Neoplea striola mosquito - larva Toxorhynchites sp. fishing spider Dolomedes sp. Photograph © William N. Roston Photograph © Paul P.Tinerella Photograph © Michael R. Jeffords Photograph © Paul P.Tinerella Species List Species are not shown in proportion to actual size. undreds of species of aquatic macroinvertebrates live in Illinois in a Kingdom Animalia Hvariety of habitats. Some of the habitats have flowing water while Phylum Annelida Class Clitellata Family Naididae aquatic worm Slavina appendiculata This poster was made possible by: others contain still water. In order to survive in water, these organisms Class Hirudinea leech must be able to breathe, find food, protect themselves, move and reproduce. -

Elmidae (Coleoptera, Byrrhoidea) Larvae in the State of São Paulo, Brazil: Identification Key, New Records and Distribution
A peer-reviewed open-access journal ZooKeys 151: 53–74Elmidae (2011) (Coleoptera, Byrrhoidea) larvae in the state of São Paulo, Brazil... 53 doi: 10.3897/zookeys.151.1879 RESEARCH ARTICLE www.zookeys.org Launched to accelerate biodiversity research Elmidae (Coleoptera, Byrrhoidea) larvae in the state of São Paulo, Brazil: Identification key, new records and distribution Melissa Ottoboni Segura1, Francisco Valente-Neto1, Alaíde Aparecida Fonseca-Gessner1,2 1 Programa de Pós-Graduação em Ecologia e Recursos Naturais, Universidade Federal de São Carlos, São Carlos, São Paulo, Brazil 2 Departamento de Hidrobiologia, Universidade Federal de São Carlos, São Carlos, São Paulo, Brazil Corresponding authors: Melissa Ottoboni Segura ([email protected]), Francisco Valente Neto (fvalenteneto@ gmail.com) Academic editor: L. Penev | Received 3 August 2011 | Accepted 17 November 2011 | Published 3 December 2011 Citation: Segura MO, Valente-Neto F, Fonseca-Gessner AA (2011) Elmidae (Coleoptera, Byrrhoidea) larvae in the state of São Paulo, Brazil: Identification key, new records and distribution. ZooKeys 151: 53–74. doi: 10.3897/zookeys.151.1879 Abstract The family Elmidae Curtis, 1830 has cosmopolitan distribution and most species inhabit riffles on streams and rivers, hence the name “riffle beetle”. In recent years, this family has been featured in papers addressing the assessment and environmental monitoring of water quality. In Brazil, studies on the fam- ily remain scarce and the present investigation is a pioneering study in the state of São Paulo. This study aims to propose a taxonomic key for the identification of larvae of Elmidae genera known to occur in the State, as well as to report new records and the distribution of these genera. -

Table of Contents 2
Southwest Association of Freshwater Invertebrate Taxonomists (SAFIT) List of Freshwater Macroinvertebrate Taxa from California and Adjacent States including Standard Taxonomic Effort Levels 1 March 2011 Austin Brady Richards and D. Christopher Rogers Table of Contents 2 1.0 Introduction 4 1.1 Acknowledgments 5 2.0 Standard Taxonomic Effort 5 2.1 Rules for Developing a Standard Taxonomic Effort Document 5 2.2 Changes from the Previous Version 6 2.3 The SAFIT Standard Taxonomic List 6 3.0 Methods and Materials 7 3.1 Habitat information 7 3.2 Geographic Scope 7 3.3 Abbreviations used in the STE List 8 3.4 Life Stage Terminology 8 4.0 Rare, Threatened and Endangered Species 8 5.0 Literature Cited 9 Appendix I. The SAFIT Standard Taxonomic Effort List 10 Phylum Silicea 11 Phylum Cnidaria 12 Phylum Platyhelminthes 14 Phylum Nemertea 15 Phylum Nemata 16 Phylum Nematomorpha 17 Phylum Entoprocta 18 Phylum Ectoprocta 19 Phylum Mollusca 20 Phylum Annelida 32 Class Hirudinea Class Branchiobdella Class Polychaeta Class Oligochaeta Phylum Arthropoda Subphylum Chelicerata, Subclass Acari 35 Subphylum Crustacea 47 Subphylum Hexapoda Class Collembola 69 Class Insecta Order Ephemeroptera 71 Order Odonata 95 Order Plecoptera 112 Order Hemiptera 126 Order Megaloptera 139 Order Neuroptera 141 Order Trichoptera 143 Order Lepidoptera 165 2 Order Coleoptera 167 Order Diptera 219 3 1.0 Introduction The Southwest Association of Freshwater Invertebrate Taxonomists (SAFIT) is charged through its charter to develop standardized levels for the taxonomic identification of aquatic macroinvertebrates in support of bioassessment. This document defines the standard levels of taxonomic effort (STE) for bioassessment data compatible with the Surface Water Ambient Monitoring Program (SWAMP) bioassessment protocols (Ode, 2007) or similar procedures. -

The Semiaquatic Hemiptera of Minnesota (Hemiptera: Heteroptera) Donald V
The Semiaquatic Hemiptera of Minnesota (Hemiptera: Heteroptera) Donald V. Bennett Edwin F. Cook Technical Bulletin 332-1981 Agricultural Experiment Station University of Minnesota St. Paul, Minnesota 55108 CONTENTS PAGE Introduction ...................................3 Key to Adults of Nearctic Families of Semiaquatic Hemiptera ................... 6 Family Saldidae-Shore Bugs ............... 7 Family Mesoveliidae-Water Treaders .......18 Family Hebridae-Velvet Water Bugs .......20 Family Hydrometridae-Marsh Treaders, Water Measurers ...22 Family Veliidae-Small Water striders, Rime bugs ................24 Family Gerridae-Water striders, Pond skaters, Wherry men .....29 Family Ochteridae-Velvety Shore Bugs ....35 Family Gelastocoridae-Toad Bugs ..........36 Literature Cited ..............................37 Figures ......................................44 Maps .........................................55 Index to Scientific Names ....................59 Acknowledgement Sincere appreciation is expressed to the following individuals: R. T. Schuh, for being extremely helpful in reviewing the section on Saldidae, lending specimens, and allowing use of his illustrations of Saldidae; C. L. Smith for reading the section on Veliidae, checking identifications, and advising on problems in the taxon omy ofthe Veliidae; D. M. Calabrese, for reviewing the section on the Gerridae and making helpful sugges tions; J. T. Polhemus, for advising on taxonomic prob lems and checking identifications for several families; C. W. Schaefer, for providing advice and editorial com ment; Y. A. Popov, for sending a copy ofhis book on the Nepomorpha; and M. C. Parsons, for supplying its English translation. The University of Minnesota, including the Agricultural Experi ment Station, is committed to the policy that all persons shall have equal access to its programs, facilities, and employment without regard to race, creed, color, sex, national origin, or handicap. The information given in this publication is for educational purposes only. -

Empirically Derived Indices of Biotic Integrity for Forested Wetlands, Coastal Salt Marshes and Wadable Freshwater Streams in Massachusetts
Empirically Derived Indices of Biotic Integrity for Forested Wetlands, Coastal Salt Marshes and Wadable Freshwater Streams in Massachusetts September 15, 2013 This report is the result of several years of field data collection, analyses and IBI development, and consideration of the opportunities for wetland program and policy development in relation to IBIs and CAPS Index of Ecological Integrity (IEI). Contributors include: University of Massachusetts Amherst Kevin McGarigal, Ethan Plunkett, Joanna Grand, Brad Compton, Theresa Portante, Kasey Rolih, and Scott Jackson Massachusetts Office of Coastal Zone Management Jan Smith, Marc Carullo, and Adrienne Pappal Massachusetts Department of Environmental Protection Lisa Rhodes, Lealdon Langley, and Michael Stroman Empirically Derived Indices of Biotic Integrity for Forested Wetlands, Coastal Salt Marshes and Wadable Freshwater Streams in Massachusetts Abstract The purpose of this study was to develop a fully empirically-based method for developing Indices of Biotic Integrity (IBIs) that does not rely on expert opinion or the arbitrary designation of reference sites and pilot its application in forested wetlands, coastal salt marshes and wadable freshwater streams in Massachusetts. The method we developed involves: 1) using a suite of regression models to estimate the abundance of each taxon across a gradient of stressor levels, 2) using statistical calibration based on the fitted regression models and maximum likelihood methods to predict the value of the stressor metric based on the abundance of the taxon at each site, 3) selecting taxa in a forward stepwise procedure that conditionally improves the concordance between the observed stressor value and the predicted value the most and a stopping rule for selecting taxa based on a conditional alpha derived from comparison to pseudotaxa data, and 4) comparing the coefficient of concordance for the final IBI to the expected distribution derived from randomly permuted data. -

Biological Diversity, Ecological Health and Condition of Aquatic Assemblages at National Wildlife Refuges in Southern Indiana, USA
Biodiversity Data Journal 3: e4300 doi: 10.3897/BDJ.3.e4300 Taxonomic Paper Biological Diversity, Ecological Health and Condition of Aquatic Assemblages at National Wildlife Refuges in Southern Indiana, USA Thomas P. Simon†, Charles C. Morris‡, Joseph R. Robb§, William McCoy | † Indiana University, Bloomington, IN 46403, United States of America ‡ US National Park Service, Indiana Dunes National Lakeshore, Porter, IN 47468, United States of America § US Fish and Wildlife Service, Big Oaks National Wildlife Refuge, Madison, IN 47250, United States of America | US Fish and Wildlife Service, Patoka River National Wildlife Refuge, Oakland City, IN 47660, United States of America Corresponding author: Thomas P. Simon ([email protected]) Academic editor: Benjamin Price Received: 08 Dec 2014 | Accepted: 09 Jan 2015 | Published: 12 Jan 2015 Citation: Simon T, Morris C, Robb J, McCoy W (2015) Biological Diversity, Ecological Health and Condition of Aquatic Assemblages at National Wildlife Refuges in Southern Indiana, USA. Biodiversity Data Journal 3: e4300. doi: 10.3897/BDJ.3.e4300 Abstract The National Wildlife Refuge system is a vital resource for the protection and conservation of biodiversity and biological integrity in the United States. Surveys were conducted to determine the spatial and temporal patterns of fish, macroinvertebrate, and crayfish populations in two watersheds that encompass three refuges in southern Indiana. The Patoka River National Wildlife Refuge had the highest number of aquatic species with 355 macroinvertebrate taxa, six crayfish species, and 82 fish species, while the Big Oaks National Wildlife Refuge had 163 macroinvertebrate taxa, seven crayfish species, and 37 fish species. The Muscatatuck National Wildlife Refuge had the lowest diversity of macroinvertebrates with 96 taxa and six crayfish species, while possessing the second highest fish species richness with 51 species. -

Taxonomic Key for the Genera of Elmidae (Coleoptera, Byrrhoidea) Occurring in Goiás State, Brazil, Including New Records and Distributional Notes
Revista Brasileira de Entomologia http://dx.doi.org/10.1590/S0085-56262013005000004 Taxonomic key for the genera of Elmidae (Coleoptera, Byrrhoidea) occurring in Goiás State, Brazil, including new records and distributional notes Felipe F. Barbosa1, André S. Fernandes2,3 & Leandro G. Oliveira1,4 1Universidade Federal de Goiás, Campus Samambaia, Departamento de Ecologia, LAMARH (Laboratório de Meio Ambiente e Recursos Hídricos), Instituto de Ciências Biológicas, Caixa Postal 131, 74001–970 Goiânia-GO, Brazil. 2Institut de Biologia Evolutiva (CSIC-UPF), de la Barceloneta 37–49, 08003 Barcelona, Spain. 3Capes Foundation, Ministry of Education of Brazil, Caixa Postal 250, 70040–020 Brasília-DF, Brazil. 4 CNPq Fellow (PQ – Proc. 303835/2009–5, PIBIC – SAP 33226). ABSTRACT. A taxonomic key for the genera of Elmidae (Coleoptera, Byrrhoidea) occurring in Goiás State, Brazil, including new records and distributional notes. Despite their great diversity and high abundance in Neotropical aquatic environments, the fauna of Elmidae remains practically unknown in some areas and even entire biomes in this region. In this work we bring, for the first time, faunistic data for the Elmidae of central Brazil. The aim of this work was to inventory the Elmidae fauna in central, southwestern and southeastern Goiás State, Brazil and to produce a taxonomic key, at genus level, for adults from the studied region. The taxonomic key presented herein offers means for the identification of all the 13 genera known to occur in Goiás, 11 of them being new records for the State. Moreover, the number of named species registered for Goiás increased from one to nine. KEYWORDS. Cerrado biome; Insecta; Neotropics; Riffle beetles. -
Nabs 2004 Final
CURRENT AND SELECTED BIBLIOGRAPHIES ON BENTHIC BIOLOGY 2004 Published August, 2005 North American Benthological Society 2 FOREWORD “Current and Selected Bibliographies on Benthic Biology” is published annu- ally for the members of the North American Benthological Society, and summarizes titles of articles published during the previous year. Pertinent titles prior to that year are also included if they have not been cited in previous reviews. I wish to thank each of the members of the NABS Literature Review Committee for providing bibliographic information for the 2004 NABS BIBLIOGRAPHY. I would also like to thank Elizabeth Wohlgemuth, INHS Librarian, and library assis- tants Anna FitzSimmons, Jessica Beverly, and Elizabeth Day, for their assistance in putting the 2004 bibliography together. Membership in the North American Benthological Society may be obtained by contacting Ms. Lucinda B. Johnson, Natural Resources Research Institute, Uni- versity of Minnesota, 5013 Miller Trunk Highway, Duluth, MN 55811. Phone: 218/720-4251. email:[email protected]. Dr. Donald W. Webb, Editor NABS Bibliography Illinois Natural History Survey Center for Biodiversity 607 East Peabody Drive Champaign, IL 61820 217/333-6846 e-mail: [email protected] 3 CONTENTS PERIPHYTON: Christine L. Weilhoefer, Environmental Science and Resources, Portland State University, Portland, O97207.................................5 ANNELIDA (Oligochaeta, etc.): Mark J. Wetzel, Center for Biodiversity, Illinois Natural History Survey, 607 East Peabody Drive, Champaign, IL 61820.................................................................................................................6 ANNELIDA (Hirudinea): Donald J. Klemm, Ecosystems Research Branch (MS-642), Ecological Exposure Research Division, National Exposure Re- search Laboratory, Office of Research & Development, U.S. Environmental Protection Agency, 26 W. Martin Luther King Dr., Cincinnati, OH 45268- 0001 and William E. -

Aquatic Macroinvertebrates Section a Aquatic Macroinvertebrates (Exclusive of Mosquitoes)
I LLINOI S UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN PRODUCTION NOTE University of Illinois at Urbana-Champaign Library Large-scale Digitization Project, 2007. \oc iatural History Survey. Library iiAOs (ClSCi;; ILLINOIS - NATURAL HISTORY Ai . .ý . - I-w. Iv mk U16 OL SURVEY CHAPTER 9 AQUATIC MACROINVERTEBRATES SECTION A AQUATIC MACROINVERTEBRATES (EXCLUSIVE OF MOSQUITOES) Final Report October, 1985 Section of Faunistic Surveys and Insect Identification Technical Report by Allison R. Brigham, Lawrence M. Page, John D. Unzicker Mark J. Wetzel, Warren U. Brigham, Donald W. Webb, and Liane Suloway Prepared for Wetlands Research, Inc. 53 West Jackson Boulevard Chicago, IL 60604 Arjpp, Section of Faunistic Surveys and Insect Identification Technical Report 1985 (6) 6'Wa- CHAPTER 9 AQUATIC MACROINVERTEBRATES SECTION A AQUATIC MACROINVERTEBRATES (EXCLUSIVE OF MOSQUITOES) Allison R. Brigham, Lawrence M. Page, John D. Unzicker Mark J. Wetzel, Warren U. Brigham, Donald W. Webb, and Liane Suloway INTRODUCTION Aquatic macroinvertebrates are primary and secondary level consumers that play an important role in transferring energy through the different trophic levels of the food chains of aquatic ecosystems. These animals feed upon submerged and emergent macrophytes, plankton, and organic material suspended in the water column. Burrowing and feeding activities aid in the decomposition of plant and animal matter and the eventual recycling of nutrients. In addition, these organisms prey upon each other and serve as food for fishes, certain birds, and other animals. In general, aquatic macroinvertebrates have not been systematically surveyed in Illinois, and rarely have individual species been studied ecologically. This is due, in part, to the inconspicuous nature of most freshwater inverte- brates and the many taxonomic problems which preclude distributional, ecologi- cal, and other studies. -

Great Lakes Entomologist the Grea T Lakes E N Omo L O G Is T Published by the Michigan Entomological Society Vol
The Great Lakes Entomologist THE GREA Published by the Michigan Entomological Society Vol. 45, Nos. 3 & 4 Fall/Winter 2012 Volume 45 Nos. 3 & 4 ISSN 0090-0222 T LAKES Table of Contents THE Scholar, Teacher, and Mentor: A Tribute to Dr. J. E. McPherson ..............................................i E N GREAT LAKES Dr. J. E. McPherson, Educator and Researcher Extraordinaire: Biographical Sketch and T List of Publications OMO Thomas J. Henry ..................................................................................................111 J.E. McPherson – A Career of Exemplary Service and Contributions to the Entomological ENTOMOLOGIST Society of America L O George G. Kennedy .............................................................................................124 G Mcphersonarcys, a New Genus for Pentatoma aequalis Say (Heteroptera: Pentatomidae) IS Donald B. Thomas ................................................................................................127 T The Stink Bugs (Hemiptera: Heteroptera: Pentatomidae) of Missouri Robert W. Sites, Kristin B. Simpson, and Diane L. Wood ............................................134 Tymbal Morphology and Co-occurrence of Spartina Sap-feeding Insects (Hemiptera: Auchenorrhyncha) Stephen W. Wilson ...............................................................................................164 Pentatomoidea (Hemiptera: Pentatomidae, Scutelleridae) Associated with the Dioecious Shrub Florida Rosemary, Ceratiola ericoides (Ericaceae) A. G. Wheeler, Jr. .................................................................................................183 -

Foster, Warne, A
ISSN 0966 2235 LATISSIMUS NEWSLETTER OF THE BALFOUR-BROWNE CLUB Number Forty Five February 2020 Liopterus haemorrhoidalis (Fab.) found in a heathland pool in Dorset, England by Peter Sutton. ADDRESSES The addresses of authors of articles and reviewed works are mainly given at the end of this issue of Latissimus. The address for other correspondence is: Professor G N Foster, 3 Eglinton Terrace, Ayr KA7 1JJ, Scotland, UK – [email protected] 1 LATISSIMUS 45 February 2020 TOWARDS A PHOTOGUIDE FOR THE LARGER BRITISH WATER BEETLES Peter Sutton For some time now, I have been working on a sequel to The Larger Water Beetles of the British Isles (Sutton 2008) in a bid to photograph all of the large and spectacular aquatic Coleoptera of Britain. The trials and tribulations of the search for these fascinating insects are described in a recent article in British Wildlife (Sutton 2017). This article also reveals that some of the medium-sized species of interest, such as those of the genus Rhantus have been included, as have species from other groups, including the raft spider, Dolomedes plantarius (Clerck) and a rare wasp, Chalcis sispes (L.), parasitic on soldierflies (Stratiomyidae), which collectively highlight the conservation importance of some of the very special habitats in which they may be found. Figure 1 Rhantus frontalis (Marsham), brackish pool, Canvey Island, South Essex February 2020 LATISSIMUS 45 2 The prospective book, therefore, covers a good number of medium-sized water beetles (7- 13 mm), from the Piles Beetle Liopterus haemorrhoidalis (Fab.) (6.3-7.9 mm) to the comparatively large Ilybius ater (12.5 -14.5 mm), known by some in Britain as the Mud Dweller.