Micromachined Resonators: a Review
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
On-Chip Χ Microring Optical Parametric Oscillator
Research Article Vol. X, No. X / April 2016 / Optica 1 On-chip c(2) microring optical parametric oscillator ALEXANDER W. BRUCH1,X IANWEN LIU1,J OSHUA B. SURYA1,C HANG-LING ZOU2, AND HONG X. TANG1, * 1Department of Electrical Engineering, Yale University, New Haven, CT 06511, USA 2Department of Optics and Optics Engineering, University of Science and Technology of China, Hefei, Anhui 230026, China *Corresponding author: [email protected] Compiled September 18, 2019 Optical parametric oscillators (OPOs) have been widely used for decades as tunable, narrow linewidth, and coherent light sources for reaching long wavelengths and are attractive for appli- cations such as quantum random number generation and Ising machines. To date, waveguide- based OPOs have suffered from relatively high thresholds on the order of hundreds of mil- liwatts. With the advance in integrated photonic techniques demonstrated by high-efficiency second harmonic generation in aluminum nitride (AlN) photonic microring resonators, highly compact and nanophotonic implementation of parametric oscillation is feasible. Here, we em- ploy phase-matched AlN microring resonators to demonstrate low-threshold parametric oscil- lation in the telecom infrared band with an on-chip efficiency up to 17% and milliwatt-level output power. A broad phase-matching window is observed, enabling tunable generation of signal and idler pairs over a 180 nm bandwidth across the C band. This result establishes an important milestone in integrated nonlinear optics and paves the way towards chip-based quan- tum light sources and tunable, coherent radiation for spectroscopy and chemical sensing. © 2019 Optical Society of America under the terms of the OSA Open Access Publishing Agreement http://dx.doi.org/10.1364/optica.XX.XXXXXX 1. -
Gold Nanoarray Deposited Using Alternating Current for Emission Rate
Xue et al. Nanoscale Research Letters 2013, 8:295 http://www.nanoscalereslett.com/content/8/1/295 NANO EXPRESS Open Access Gold nanoarray deposited using alternating current for emission rate-manipulating nanoantenna Jiancai Xue1, Qiangzhong Zhu1, Jiaming Liu1, Yinyin Li2, Zhang-Kai Zhou1*, Zhaoyong Lin1, Jiahao Yan1, Juntao Li1 and Xue-Hua Wang1* Abstract We have proposed an easy and controllable method to prepare highly ordered Au nanoarray by pulse alternating current deposition in anodic aluminum oxide template. Using the ultraviolet–visible-near-infrared region spectrophotometer, finite difference time domain, and Green function method, we experimentally and theoretically investigated the surface plasmon resonance, electric field distribution, and local density of states enhancement of the uniform Au nanoarray system. The time-resolved photoluminescence spectra of quantum dots show that the emission rate increased from 0.0429 to 0.5 ns−1 (10.7 times larger) by the existence of the Au nanoarray. Our findings not only suggest a convenient method for ordered nanoarray growth but also prove the utilization of the Au nanoarray for light emission-manipulating antennas, which can help build various functional plasmonic nanodevices. Keywords: Anodic aluminum oxide template, Au nanoarray, Emission rate, Nanoantenna, Surface plasmon PACS: 82.45.Yz, 78.47.jd, 62.23.Pq Background Owing to the self-organized hexagonal arrays of Excited by an incident photon beam and provoking a uniform parallel nanochannels, anodic aluminum oxide collective oscillation of free electron gas, plasmonic (AAO) film has been widely used as the template for materials gain the ability to manipulate electromagnetic nanoarray growth [26-29]. Many distinctive discoveries field at a deep-subwavelength scale, making them play a have been made in the nanosystems fabricated in AAO major role in current nanoscience [1-5]. -

MEMS Technology for Physiologically Integrated Devices
A BioMEMS Review: MEMS Technology for Physiologically Integrated Devices AMY C. RICHARDS GRAYSON, REBECCA S. SHAWGO, AUDREY M. JOHNSON, NOLAN T. FLYNN, YAWEN LI, MICHAEL J. CIMA, AND ROBERT LANGER Invited Paper MEMS devices are manufactured using similar microfabrica- I. INTRODUCTION tion techniques as those used to create integrated circuits. They often, however, have moving components that allow physical Microelectromechanical systems (MEMS) devices are or analytical functions to be performed by the device. Although manufactured using similar microfabrication techniques as MEMS can be aseptically fabricated and hermetically sealed, those used to create integrated circuits. They often have biocompatibility of the component materials is a key issue for moving components that allow a physical or analytical MEMS used in vivo. Interest in MEMS for biological applications function to be performed by the device in addition to (BioMEMS) is growing rapidly, with opportunities in areas such as biosensors, pacemakers, immunoisolation capsules, and drug their electrical functions. Microfabrication of silicon-based delivery. The key to many of these applications lies in the lever- structures is usually achieved by repeating sequences of aging of features unique to MEMS (for example, analyte sensitivity, photolithography, etching, and deposition steps in order to electrical responsiveness, temporal control, and feature sizes produce the desired configuration of features, such as traces similar to cells and organelles) for maximum impact. In this paper, (thin metal wires), vias (interlayer connections), reservoirs, we focus on how the biological integration of MEMS and other valves, or membranes, in a layer-by-layer fashion. The implantable devices can be improved through the application of microfabrication technology and concepts. -

Dynamic Manipulation of Mechanical Resonators in the High Amplitude Regime Through Optical Backaction
Dynamic manipulation of mechanical resonators in the high amplitude regime through optical backaction Mahmood Bagheri, Menno Poot, Mo Li, Wolfram P. H. Pernice, Hong X. Tang Department of Electrical Engineering, Yale University, New Haven, CT 06511 Cavity optomechanics enables active manipulation of mechanical resonators through backaction cooling and amplification1,2. This ability to control mechanical motion with retarded optical forces has recently spurred a race towards realizing a mechanical resonator in its quantum ground state3,4,5,6,7,8,9. Here, instead of quenching optomechanical motion, we demonstrate high amplitude operation of nanomechanical resonators by utilizing a highly efficient phonon generation process. In this regime, the nanomechanical resonators gain sufficient energy from the optical field to overcome the large energy barrier of a double well potential, leading to nanomechanical slow-down and zero frequency singularity, as predicted by early theories10. Besides fundamental studies and interests in parametric amplification of small forces11, optomechanical backaction is also projected to open new windows for studying discrete mechanical states12,13 and to foster applications14,15,16,17. Here we realize a non-volatile mechanical memory element, in which bits are written and reset via optomechanical backaction by controlling the mechanical damping across the barrier. Our study casts a new perspective on the energy dynamics in coupled mechanical resonator – cavity systems and enables novel functional devices that utilize the principles of cavity optomechanics. Classical and quantum dynamics of nanomechanical systems promise new applications in nanotechnology18,19 and fundamental tests of quantum mechanics in mesoscopic objects2,9. Recent development of nanoscale electromechanical (NEMS) and optomechanical systems has enabled cooling of mechanical systems to their quantum ground state7,8, which brings the possibility of quantum information processing with mechanical devices20,21. -

Bringing Optical Metamaterials to Reality
UC Berkeley UC Berkeley Electronic Theses and Dissertations Title Bringing Optical Metamaterials to Reality Permalink https://escholarship.org/uc/item/5d37803w Author Valentine, Jason Gage Publication Date 2010 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California Bringing Optical Metamaterials to Reality By Jason Gage Valentine A dissertation in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Engineering – Mechanical Engineering in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Xiang Zhang, Chair Professor Costas Grigoropoulos Professor Liwei Lin Professor Ming Wu Fall 2010 Bringing Optical Metamaterials to Reality © 2010 By Jason Gage Valentine Abstract Bringing Optical Metamaterials to Reality by Jason Gage Valentine Doctor of Philosophy in Mechanical Engineering University of California, Berkeley Professor Xiang Zhang, Chair Metamaterials, which are artificially engineered composites, have been shown to exhibit electromagnetic properties not attainable with naturally occurring materials. The use of such materials has been proposed for numerous applications including sub-diffraction limit imaging and electromagnetic cloaking. While these materials were first developed to work at microwave frequencies, scaling them to optical wavelengths has involved both fundamental and engineering challenges. Among these challenges, optical metamaterials tend to absorb a large amount of the incident light and furthermore, achieving devices with such materials has been difficult due to fabrication constraints associated with their nanoscale architectures. The objective of this dissertation is to describe the progress that I have made in overcoming these challenges in achieving low loss optical metamaterials and associated devices. The first part of the dissertation details the development of the first bulk optical metamaterial with a negative index of refraction. -
I. Common Base / Common Gate Amplifiers
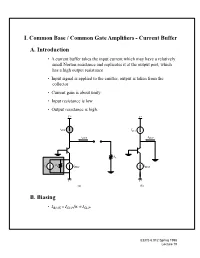
I. Common Base / Common Gate Amplifiers - Current Buffer A. Introduction • A current buffer takes the input current which may have a relatively small Norton resistance and replicates it at the output port, which has a high output resistance • Input signal is applied to the emitter, output is taken from the collector • Current gain is about unity • Input resistance is low • Output resistance is high. V+ V+ i SUP ISUP iOUT IOUT RL R is S IBIAS IBIAS V− V− (a) (b) B. Biasing = /α ≈ • IBIAS ISUP ISUP EECS 6.012 Spring 1998 Lecture 19 II. Small Signal Two Port Parameters A. Common Base Current Gain Ai • Small-signal circuit; apply test current and measure the short circuit output current ib iout + = β v r gmv oib r − o ve roc it • Analysis -- see Chapter 8, pp. 507-509. • Result: –β ---------------o ≅ Ai = β – 1 1 + o • Intuition: iout = ic = (- ie- ib ) = -it - ib and ib is small EECS 6.012 Spring 1998 Lecture 19 B. Common Base Input Resistance Ri • Apply test current, with load resistor RL present at the output + v r gmv r − o roc RL + vt i − t • See pages 509-510 and note that the transconductance generator dominates which yields 1 Ri = ------ gm µ • A typical transconductance is around 4 mS, with IC = 100 A • Typical input resistance is 250 Ω -- very small, as desired for a current amplifier • Ri can be designed arbitrarily small, at the price of current (power dissipation) EECS 6.012 Spring 1998 Lecture 19 C. Common-Base Output Resistance Ro • Apply test current with source resistance of input current source in place • Note roc as is in parallel with rest of circuit g v m ro + vt it r − oc − v r RS + • Analysis is on pp. -

ECE 255, MOSFET Basic Configurations
ECE 255, MOSFET Basic Configurations 8 March 2018 In this lecture, we will go back to Section 7.3, and the basic configurations of MOSFET amplifiers will be studied similar to that of BJT. Previously, it has been shown that with the transistor DC biased at the appropriate point (Q point or operating point), linear relations can be derived between the small voltage signal and current signal. We will continue this analysis with MOSFETs, starting with the common-source amplifier. 1 Common-Source (CS) Amplifier The common-source (CS) amplifier for MOSFET is the analogue of the common- emitter amplifier for BJT. Its popularity arises from its high gain, and that by cascading a number of them, larger amplification of the signal can be achieved. 1.1 Chararacteristic Parameters of the CS Amplifier Figure 1(a) shows the small-signal model for the common-source amplifier. Here, RD is considered part of the amplifier and is the resistance that one measures between the drain and the ground. The small-signal model can be replaced by its hybrid-π model as shown in Figure 1(b). Then the current induced in the output port is i = −gmvgs as indicated by the current source. Thus vo = −gmvgsRD (1.1) By inspection, one sees that Rin = 1; vi = vsig; vgs = vi (1.2) Thus the open-circuit voltage gain is vo Avo = = −gmRD (1.3) vi Printed on March 14, 2018 at 10 : 48: W.C. Chew and S.K. Gupta. 1 One can replace a linear circuit driven by a source by its Th´evenin equivalence. -

30-Hz Relative Linewidth Watt Output Power 1.65-$\Mu $ M Continuous
30-Hz relative linewidth watt output power 1.65 µm continuous-wave singly resonant optical parametric oscillator Aliou Ly1, Christophe Siour1, and Fabien Bretenaker1∗ 1Laboratoire Aim´eCotton, Universit´eParis-Sud, ENS Paris-Saclay, CNRS, Universit´eParis-Saclay, Orsay, France We built a 1-watt cw singly resonant optical parametric oscillator operating at an idler wavelength of 1.65 µm for application to quantum interfaces. The non resonant idler is frequency stabilized by side-fringe locking on a relatively high-finesse Fabry-Perot cavity, and the influence of intensity noise is carefully analyzed. A relative linewidth down to the sub-kHz level (about 30 Hz over 2 s) is achieved. A very good long term stability is obtained for both frequency and intensity. PACS numbers: I. INTRODUCTION [7]. To overcome this limitation, several strategies were explored. Some authors have tried to perform an efficient spectral filtering of the up-converted signal [8], while oth- Building efficient quantum communication networks ers have tried a cascaded single photon up-conversion [9]. requires the implementation of quantum light-matter in- But the most promising approach would be to pump at a terfaces in the communication channels in order to over- wavelength much longer than that of the signal to be come two major limitations. First, the attenuation of up-converted. Moreover, the availability of a broadly light in telecom C-band optical fibers significantly lim- tunable pump would certainly make it easier to mini- its the reachable communication distances to few tens of mize the SRS noise for a given signal or up-converted kilometers at the single photon level. -
Tuning the Resonant Frequency and Damping of an Electromagnetic Energy Harvester Using Power Electronics Paul D
Tuning the Resonant Frequency and Damping of an Electromagnetic Energy Harvester Using Power Electronics Paul D. Mitcheson Member, IEEE, Tzern T. Toh, Kwok H. Wong, Steve G. Burrow Member, IEEE and Andrew S. Holmes Member, IEEE Abstract—In order to maximize power density, the resonant magnetic transduction mechanism (represented by a parasitic frequency of an energy harvester should be equal to the source inductance and resistance, Larm and Rarm, respectively, and excitation frequency and the electrical damping set equal to a transformer). The resistor, inductor and capacitor on the the parasitic damping. These parameters should be adjustable during device operation because the excitation characteristics can primary-side of the transformer represent parasitic damping change. This brief presents, for the first time, a power electronic Dp, spring constant k, and proof mass, m, respectively. A interface that is capable of continual adjustment of the damping resistor, RL, is connected to the secondary windings to form and the resonant frequency of an energy harvester by controlling a typical electrical load, and its value determines the electrical real and reactive power exchange between the electrical and damping of the transducer and therefore the generated power mechanical domains while storing the harvested energy in a bat- tery. The advantages of this technique over previously proposed for a given source excitation of frequency ω and amplitude Y0. methods are the precise control over the tuning parameters of the Clearly, the addition of the reactive components, LL and CL electrical system and integrated rectification within the tuning in Fig. 1 is also possible, and the reason for this is explained interface. -

Design of a Microelectronic Manufacturing Laboratory
2006-1635: DESIGN OF A MICROELECTRONIC MANUFACTURING LABORATORY Stilson Applin, Montana State University Todd Kaiser, Montana State University Page 11.407.1 Page © American Society for Engineering Education, 2006 Design of a Microelectronic Manufacturing Laboratory Abstract The design of an undergraduate microelectronic manufacturing laboratory for teaching will be described in the following paper. This laboratory emphasizes learning the processes of semiconductor manufacturing and clean room protocol. The laboratory is housed in a 500 square foot, class 10,000 facility. In the laboratory the students, with a junior standing and a science based background, will use a pre-made six mask set to create P and N type transistors as well as inverters and diodes. The students will be conducting oxidization, RCA clean, photolithography, etching, diffusion, metallization and other processes. A brief description of these processes and the methods used to teach them will also be described. In addition to these processes students will also learn about clean room protocol, chemical safety, and testing devices. All of these skills will be marketable to future employers and graduate schools. These same skills and processes will be covered in a seminar course for educators, with the main purpose of inspiring the high school teachers to teach about semiconductor manufacturing. The cost effective design is what makes the laboratory unique. The expenditure control is important due to the size of the Electrical Engineering department. The department has only 250 undergraduates and 40 graduate students, thus internal funding is difficult to obtain. A user fee paid by the students will cover the funding. This fee will be small and manageable for any college student. -

Advanced Solar Technology Sample
ADVANCED SOLAR TECHNOLOGY SAMPLE TECHNOLOGY ACQUISITION REPORT CONTENTS Technology 1: Microsystems Enabled Photovoltaics (MEPV) - Photovoltaic solar concentrator ............... 4 Technology 2: Method and apparatus for integrating an infrared (ir) photovoltaic cell on a thin film photovoltaic cell ............................................................................................................................................ 7 Technology 3: Photovoltaic cells with quantum dots with built-in-charge and methods of making same 10 Technology 4: Super-transparent electodes for photovoltaic applications ................................................. 13 Technology 5: Optical concentrator and associated photovoltaic devices ................................................. 15 Technology 6: Hybrid photovoltaic devices and applications thereof ........................................................ 18 Technology 7: Methods of manufacturing photovoltaic electrodes ............................................................ 20 Technology 8: Thin film photovoltaic cell structure, nanoantenna, and method for manufacturing ......... 23 Technology 9: Apparatuses, systems and methods for cleaning photovoltaic devices .............................. 26 Technology 10: Photovoltaic structures having a light scattering Interface layer and methods of making the same ....................................................................................................................................................... 28 Technology 11: Rapid thermal -

A Review of Current Methods in Microfluidic Device Fabrication And
inventions Review A Review of Current Methods in Microfluidic Device Fabrication and Future Commercialization Prospects Bruce K. Gale * ID , Alexander R. Jafek ID , Christopher J. Lambert ID , Brady L. Goenner, Hossein Moghimifam, Ugochukwu C. Nze ID and Suraj Kumar Kamarapu ID Department of Mechanical Engineering, University of Utah, Salt Lake City, UT 84112, USA; [email protected] (A.R.J.); [email protected] (C.J.L.); [email protected] (B.L.G.); [email protected] (H.M.); [email protected] (U.C.N.); [email protected] (S.K.K.) * Correspondence: [email protected]; Tel.: +1-801-585-5944 Received: 30 June 2018; Accepted: 20 August 2018; Published: 28 August 2018 Abstract: Microfluidic devices currently play an important role in many biological, chemical, and engineering applications, and there are many ways to fabricate the necessary channel and feature dimensions. In this review, we provide an overview of microfabrication techniques that are relevant to both research and commercial use. A special emphasis on both the most practical and the recently developed methods for microfluidic device fabrication is applied, and it leads us to specifically address laminate, molding, 3D printing, and high resolution nanofabrication techniques. The methods are compared for their relative costs and benefits, with special attention paid to the commercialization prospects of the various technologies. Keywords: microfabrication; nanofabrication; microfluidics; nanofluidics; 3D printing; laminates; molding 1. Introduction Microfluidics is a growing field of research which pertains to the manipulation of fluids on the microscale level, and it is identified most commonly by devices with critical dimensions of less than 1 mm.