MEMS Cantilever Resonators Under Soft AC
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Gold Nanoarray Deposited Using Alternating Current for Emission Rate
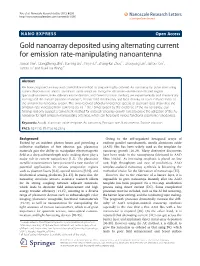
Xue et al. Nanoscale Research Letters 2013, 8:295 http://www.nanoscalereslett.com/content/8/1/295 NANO EXPRESS Open Access Gold nanoarray deposited using alternating current for emission rate-manipulating nanoantenna Jiancai Xue1, Qiangzhong Zhu1, Jiaming Liu1, Yinyin Li2, Zhang-Kai Zhou1*, Zhaoyong Lin1, Jiahao Yan1, Juntao Li1 and Xue-Hua Wang1* Abstract We have proposed an easy and controllable method to prepare highly ordered Au nanoarray by pulse alternating current deposition in anodic aluminum oxide template. Using the ultraviolet–visible-near-infrared region spectrophotometer, finite difference time domain, and Green function method, we experimentally and theoretically investigated the surface plasmon resonance, electric field distribution, and local density of states enhancement of the uniform Au nanoarray system. The time-resolved photoluminescence spectra of quantum dots show that the emission rate increased from 0.0429 to 0.5 ns−1 (10.7 times larger) by the existence of the Au nanoarray. Our findings not only suggest a convenient method for ordered nanoarray growth but also prove the utilization of the Au nanoarray for light emission-manipulating antennas, which can help build various functional plasmonic nanodevices. Keywords: Anodic aluminum oxide template, Au nanoarray, Emission rate, Nanoantenna, Surface plasmon PACS: 82.45.Yz, 78.47.jd, 62.23.Pq Background Owing to the self-organized hexagonal arrays of Excited by an incident photon beam and provoking a uniform parallel nanochannels, anodic aluminum oxide collective oscillation of free electron gas, plasmonic (AAO) film has been widely used as the template for materials gain the ability to manipulate electromagnetic nanoarray growth [26-29]. Many distinctive discoveries field at a deep-subwavelength scale, making them play a have been made in the nanosystems fabricated in AAO major role in current nanoscience [1-5]. -

Bringing Optical Metamaterials to Reality
UC Berkeley UC Berkeley Electronic Theses and Dissertations Title Bringing Optical Metamaterials to Reality Permalink https://escholarship.org/uc/item/5d37803w Author Valentine, Jason Gage Publication Date 2010 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California Bringing Optical Metamaterials to Reality By Jason Gage Valentine A dissertation in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Engineering – Mechanical Engineering in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Xiang Zhang, Chair Professor Costas Grigoropoulos Professor Liwei Lin Professor Ming Wu Fall 2010 Bringing Optical Metamaterials to Reality © 2010 By Jason Gage Valentine Abstract Bringing Optical Metamaterials to Reality by Jason Gage Valentine Doctor of Philosophy in Mechanical Engineering University of California, Berkeley Professor Xiang Zhang, Chair Metamaterials, which are artificially engineered composites, have been shown to exhibit electromagnetic properties not attainable with naturally occurring materials. The use of such materials has been proposed for numerous applications including sub-diffraction limit imaging and electromagnetic cloaking. While these materials were first developed to work at microwave frequencies, scaling them to optical wavelengths has involved both fundamental and engineering challenges. Among these challenges, optical metamaterials tend to absorb a large amount of the incident light and furthermore, achieving devices with such materials has been difficult due to fabrication constraints associated with their nanoscale architectures. The objective of this dissertation is to describe the progress that I have made in overcoming these challenges in achieving low loss optical metamaterials and associated devices. The first part of the dissertation details the development of the first bulk optical metamaterial with a negative index of refraction. -

Oct. 30, 1923. 1,472,583 W
Oct. 30, 1923. 1,472,583 W. G. CADY . METHOD OF MAINTAINING ELECTRIC CURRENTS OF CONSTANT FREQUENCY Filed May 28. 1921 Patented Oct. 30, 1923. 1,472,583 UNITED STATES PATENT OFFICE, WALTER GUYTON CADY, OF MIDDLETowN, connECTICUT. METHOD OF MAINTAINING ELECTRIC CURRENTS OF CONSTANT FREQUENCY, To all whom it may concern:Application filed May 28, 1921. Serial No. 473,434. REISSUED Be it known that I, WALTER G. CADY, a tric resonator that I take advantage of for citizen of the United States of America, my present purpose are-first: that prop residing at Middletown, in the county of erty by virtue of which such a resonator, 5 Middlesex, State of Connecticut, have in whose vibrations are maintained by im vented certain new and useful Improve pulses; received from one electric circuit, ments in Method of Maintaining Electric may be used to transmit energy in the form B) Currents of Constant Frequency, of which of an alternating current into another cir the following is a full, clear, and exact de cuit; second, that property which it posses 0 scription. ses of modifying by its reactions the alter The invention which forms the subject nating current of a particular frequency or of my present application for Letters Patent frequencies flowing to it; and third, the fact that the effective capacity of the resonator andis an maintainingimprovement alternatingin the art ofcurrents producing of depends, in a manner which will more fully 5 constant frequency. It is well known that hereinafter appear, upon the frequency of heretofore the development of such currents the current in the circuit with which it may to any very high degree of precision has be connected. -
Alternating Current Principles
Basic Electrical Theory Power Principles and Phase Angle PJM State & Member Training Dept. PJM©2014 10/24/2013 Objectives • At the end of this presentation the learner will be able to; • Identify the characteristics of Sine Waves • Discuss the principles of AC Voltage, Current, and Phase Relations • Compute the Energy and Power on AC Systems • Identify Three-Phase Power and its configurations PJM©2014 10/24/2013 Sine Waves PJM©2014 10/24/2013 Sine Waves • Generator operation is based on the principles of electromagnetic induction which states: When a conductor moves, cuts, or passes through a magnetic field, or vice versa, a voltage is induced in the conductor • When a generator shaft rotates, a conductor loop is forced through a magnetic field inducing a voltage PJM©2014 10/24/2013 Sine Waves • The magnitude of the induced voltage is dependant upon: • Strength of the magnetic field • Position of the conductor loop in reference to the magnetic lines of force • As the conductor rotates through the magnetic field, the shape produced by the changing magnitude of the voltage is a sine wave • http://micro.magnet.fsu.edu/electromag/java/generator/ac.html PJM©2014 10/24/2013 Sine Waves PJM©2014 10/24/2013 Sine Waves RMS PJM©2014 10/24/2013 Sine Waves • A cycle is the part of a sine wave that does not repeat or duplicate itself • A period (T) is the time required to complete one cycle • Frequency (f) is the rate at which cycles are produced • Frequency is measured in hertz (Hz), One hertz equals one cycle per second PJM©2014 10/24/2013 Sine Waves -

Unit I Microwave Transmission Lines
UNIT I MICROWAVE TRANSMISSION LINES INTRODUCTION Microwaves are electromagnetic waves with wavelengths ranging from 1 mm to 1 m, or frequencies between 300 MHz and 300 GHz. Apparatus and techniques may be described qualitatively as "microwave" when the wavelengths of signals are roughly the same as the dimensions of the equipment, so that lumped-element circuit theory is inaccurate. As a consequence, practical microwave technique tends to move away from the discrete resistors, capacitors, and inductors used with lower frequency radio waves. Instead, distributed circuit elements and transmission-line theory are more useful methods for design, analysis. Open-wire and coaxial transmission lines give way to waveguides, and lumped-element tuned circuits are replaced by cavity resonators or resonant lines. Effects of reflection, polarization, scattering, diffraction, and atmospheric absorption usually associated with visible light are of practical significance in the study of microwave propagation. The same equations of electromagnetic theory apply at all frequencies. While the name may suggest a micrometer wavelength, it is better understood as indicating wavelengths very much smaller than those used in radio broadcasting. The boundaries between far infrared light, terahertz radiation, microwaves, and ultra-high-frequency radio waves are fairly arbitrary and are used variously between different fields of study. The term microwave generally refers to "alternating current signals with frequencies between 300 MHz (3×108 Hz) and 300 GHz (3×1011 Hz)."[1] Both IEC standard 60050 and IEEE standard 100 define "microwave" frequencies starting at 1 GHz (30 cm wavelength). Electromagnetic waves longer (lower frequency) than microwaves are called "radio waves". Electromagnetic radiation with shorter wavelengths may be called "millimeter waves", terahertz radiation or even T-rays. -

Experiment 12: AC Circuits - RLC Circuit
Experiment 12: AC Circuits - RLC Circuit Introduction An inductor (L) is an important component of circuits, on the same level as resistors (R) and capacitors (C). The inductor is based on the principle of inductance - that moving charges create a magnetic field (the reverse is also true - a moving magnetic field creates an electric field). Inductors can be used to produce a desired magnetic field and store energy in its magnetic field, similar to capacitors being used to produce electric fields and storing energy in their electric field. At its simplest level, an inductor consists of a coil of wire in a circuit. The circuit symbol for an inductor is shown in Figure 1a. So far we observed that in an RC circuit the charge, current, and potential difference grew and decayed exponentially described by a time constant τ. If an inductor and a capacitor are connected in series in a circuit, the charge, current and potential difference do not grow/decay exponentially, but instead oscillate sinusoidally. In an ideal setting (no internal resistance) these oscillations will continue indefinitely with a period (T) and an angular frequency ! given by 1 ! = p (1) LC This is referred to as the circuit's natural angular frequency. A circuit containing a resistor, a capacitor, and an inductor is called an RLC circuit (or LCR), as shown in Figure 1b. With a resistor present, the total electromagnetic energy is no longer constant since energy is lost via Joule heating in the resistor. The oscillations of charge, current and potential are now continuously decreasing with amplitude. -

Wave Guides & Resonators
UNIT I WAVEGUIDES & RESONATORS INTRODUCTION Microwaves are electromagnetic waves with wavelengths ranging from 1 mm to 1 m, or frequencies between 300 MHz and 300 GHz. Apparatus and techniques may be described qualitatively as "microwave" when the wavelengths of signals are roughly the same as the dimensions of the equipment, so that lumped-element circuit theory is inaccurate. As a consequence, practical microwave technique tends to move away from the discrete resistors, capacitors, and inductors used with lower frequency radio waves. Instead, distributed circuit elements and transmission-line theory are more useful methods for design, analysis. Open-wire and coaxial transmission lines give way to waveguides, and lumped-element tuned circuits are replaced by cavity resonators or resonant lines. Effects of reflection, polarization, scattering, diffraction, and atmospheric absorption usually associated with visible light are of practical significance in the study of microwave propagation. The same equations of electromagnetic theory apply at all frequencies. While the name may suggest a micrometer wavelength, it is better understood as indicating wavelengths very much smaller than those used in radio broadcasting. The boundaries between far infrared light, terahertz radiation, microwaves, and ultra-high-frequency radio waves are fairly arbitrary and are used variously between different fields of study. The term microwave generally refers to "alternating current signals with frequencies between 300 MHz (3×108 Hz) and 300 GHz (3×1011 Hz)."[1] Both IEC standard 60050 and IEEE standard 100 define "microwave" frequencies starting at 1 GHz (30 cm wavelength). Electromagnetic waves longer (lower frequency) than microwaves are called "radio waves". Electromagnetic radiation with shorter wavelengths may be called "millimeter waves", terahertz Page 1 radiation or even T-rays. -

Electric Current and Electrical Energy
Unit 9P.2: Electricity and energy Electric Current and Electrical Energy What Is Electric Current? We use electricity every day to watch TV, use a Write all the computer, or turn on a light. Electricity makes all of vocab words you these things work.Electrical energy is the energy of find in BOLD electric charges. In most of the things that use electrical energy, the charges(electrons) flow through wires. As per the text The movement of charges is called an electric current. Electric currents provide the energy to things that use electrical energy. We talk about electric current in units called amperes, or amps.The symbol for ampere is A. In equations, the symbol for current is the letter I. AC AND DC There are two kinds of electric current—direct current (DC) and alternating current (AC). In the figure below you can see that in direct current, the charges always flow in the same direction. In alternating current, the direction of the charges continually changes. It moves in one direction, then in the opposite direction. The electric current from the batteries in a camera or Describe What kind of a flashlight is DC. The current from outlets in your current makes a home is AC. Both kinds of current give you electrical refrigerator energy. run and in what direction What Is Voltage? do the charges move? If you are on a bike at the top of a hill, you can roll Alternating current makes a down to the bottom. This happens because of the refrigerator run. difference in height between the two points. -

First Ten Years of Active Metamaterial Structures with “Negative” Elements
EPJ Appl. Metamat. 5, 9 (2018) © S. Hrabar, published by EDP Sciences, 2018 https://doi.org/10.1051/epjam/2018005 Available online at: Metamaterials’2017 epjam.edp-open.org Metamaterials and Novel Wave Phenomena: Theory, Design and Applications REVIEW First ten years of active metamaterial structures with “negative” elements Silvio Hrabar* University of Zagreb, Faculty of Electrical Engineering and Computing, Unska 3, Zagreb, HR-10000, Croatia Received: 18 September 2017 / Accepted: 27 June 2018 Abstract. Almost ten years have passed since the first experimental attempts of enhancing functionality of radiofrequency metamaterials by embedding active circuits that mimic behavior of hypothetical negative capacitors, negative inductors and negative resistors. While negative capacitors and negative inductors can compensate for dispersive behavior of ordinary passive metamaterials and provide wide operational bandwidth, negative resistors can compensate for inherent losses. Here, the evolution of aforementioned research field, together with the most important theoretical and experimental results, is reviewed. In addition, some very recent efforts that go beyond idealistic impedance negation and make use of inherent non-ideality, instability, and non-linearity of realistic devices are highlighted. Finally, a very fundamental, but still unsolved issue of common theoretical framework that connects causality, stability, and non-linearity of networks with negative elements is stressed. Keywords: Active metamaterial / Non-Foster / Causality / Stability / Non-linearity 1 Introduction dispersion becomes significant. The same behavior applies for metamaterials, in which above effects occur to the All materials (except vacuum) are dispersive [1,2] due to resonant energy redistribution in some kind of an inevitable resonant behavior of electric/magnetic polari- electromagnetic structure [2]. -

The Effect of Alternating Current on the Current States of a Quantum Interferometer Shunted by a Superconducting Inductance S
The effect of alternating current on the current states of a quantum interferometer shunted by a superconducting inductance S. I. Link, V. P. Koverya, A. V. Krevsun,a) and S. I. Bondarenko B.I. Verkin Institute for Low Temperature Physics and Engineering of the National Academy of Sciences of Ukraine 47 Nauky Ave, Kharkiv, 61103, Ukraine The patterns of reversible changes in the critical current and discrete current states of a structure in the form of a superconducting quantum interferometer shunted by superconducting inductance, as a result of passing an alternating transport current through the structure and applying an external alternating magnetic field simultaneously with a direct transport current, was established. A new type of discrete stationary state was discovered during the transition of the interferometer to the resistive state caused by the combined action of direct and alternating transport currents. 1. Introduction 2. Regarding the Theory of Basic Characteristics of the SQUID-SI Structure This paper is dedicated to the study of current character- istics of a superconducting quantum interference device An important work that served as the starting point for (SQUID) shunted by a larger superconducting inductance the creation and study of the SQUID-SI structure was a fun- (SI) compared with that of the SQUID (see Fig. 1). damental article by Silver and Zimmerman, published 50 8 Shunting of a SQUID with a SI was proposed by us years ago. The article investigates current quantum states of several years ago.1–4 the simplest SQUID with one superconducting point contact As shown in Refs. 2 and 3, the use of this structure [Fig. -
RF for Mes Belomestnykh.Pptx
RF fundamentals for mechanical engineers Lecture 1: Transmission lines and S-parameters Sergey Belomestnykh BNL April 19, 2011 RF lectures for Mechanical Engineers BNL April 19 & 21, 2011 Introduction to lectures ² The goal of these lectures is to provide C-AD mechanical engineers some background in RF. ² The formulae for the most part will not be derived, but rather given with (hopefully) sufficient explanations. ² We are not in a position to cover all topics, but just a few directly related to developing accelerating structures. RF circuits, power generation, LLRF, etc. will not be covered. Most of the topics came from the original request of Steve Bellavia. ² The material is split into three lectures that will be delivered during two one-hour sessions on April 19th (3:00 pm to 4:00 pm) and April 21st (10:00 am to 11:00 am). ¨ Lecture 1 – S. Belomestnykh – April 19: Transmission lines and S-parameters. ¨ Lecture 2 – Q. Wu – April 19 & 21: Resonant cavities (pill-box, elliptical cavities, quarter-wave and half-wave resonators), figures of merits. ¨ Lecture 3 – W. Xu – April 21: Input couplers, multipacting, HOM couplers. April 19, 2011 S. Belomestnykh: Transmission lines, matching, S parameters 2 Outline ¨ What is an RF transmission line? ¨ Transmission line parameters. ¨ Reflection. ¨ Impedance transformation in transmission lines. ¨ S-parameters. ¨ Common types of transmission lines used in accelerators: Coaxial line and Rectangular waveguide. April 19, 2011 S. Belomestnykh: Transmission lines, matching, S parameters 3 What is an RF transmission line? ¨ In general, a transmission line is a medium or structure that forms a path to direct energy from one place to another. -

Alternating Current — Also Known As AC Power, Alternating Current Is Electricity That Reverses Direction Within a Circuit
Alternating current — Also known as AC power, alternating current is electricity that reverses direction within a circuit. The electricity we use in our homes does this 120 times per second. Appliances — Devices used in the home to perform domestic chores, such as a clothes dryer, dishwasher, refrigerator, and toaster. Amperage, amps — A measurement of the amount of electric current. Atmosphere — The layer of gases that surrounds the earth. Atom — The smallest unit of matter. Scientists so far have found 112 different kinds of atoms. Everything in the world is made of different combinations of these atoms. Biomass — Organic materials, such as wood by-products and agricultural wastes, that can be burned to produce energy or converted into a gas and used for fuel. Carbon dioxide — A colorless, odorless, nonpoisonous gas that is a normal part of the air we breathe. Carbon dioxide is exhaled by humans and animals, and is absorbed by green growing things and by the sea. Carbon monoxide (CO) – A colorless, odorless gas produced when any fossil fuel is used improperly and burns without sufficient oxygen. CO poisoning causes flu-like symptoms and in rare cases, death. It can be prevented through proper appliance installation, maintenance, and use. Caulk — A thick paste-like substance used to fill up a crack or seam to make it watertight or airtight. CFL — Compact fluorescent light. Chemical energy — Energy that is released by a chemical reaction. Chemical reaction — A process that changes one substance into another substance. Chemical reactions that take place during digestion change energy in food into substances that the body can use to do work.