PROGRAMMABLE ARRAY LOGIC the PAL Device Is a Special Case of PLA Which Has a Programmable and Array and a Fixed OR Array
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
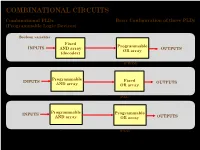
COMBINATIONAL CIRCUITS Combinational Plds Basic Configuration of Three Plds (Programmable Logic Devices)
COMBINATIONAL CIRCUITS Combinational PLDs Basic Configuration of three PLDs (Programmable Logic Devices) Boolean variables Fixed Programmable INPUTS AND array OUTPUTS OR array (decoder) Programmable Read-Only Memory (PROM) Programmable INPUTS Fixed OUTPUTS AND array OR array Programmable Array Logic (PAL) Programmable INPUTS Programmable AND array OR array OUTPUTS (Field) Programmable Logic Array (PLA) 1 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Two-level AND-OR Arrays (Programmable Logic Devices) F (C,B, A) = CBA + CB A A AND B + V B C A C B F C F AND F + V 1 B OR C Multiple functions Simplified equivalent circuit for two-level AND-OR array 2 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Field-programmable AND and OR Arrays (Programmable Logic Devices) Field-programmable logic elements are devices that contain uncommitted AND/OR arrays that are (programmed) configured by the designer. + V + V A A F (C,B, A) F (C,B, A) = CBA B B C C Unprogrammed AND array Fuse can be "blown" by passing a high current through it. 3 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Field-programmable AND and OR Arrays (Programmable Logic Devices) F (P1 ,P2 ,P3 ) = P1 + P3 P1 P1 P2 P2 P3 P3 F F (P1 ,P2 ,P3 ) Unprogrammed OR array Programmed OR array P1 P2 P3 P1 + P3 4 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Output Polarity Options (Programmable Logic Devices) I1 Ik Active high Active low Complementary outputs Programmable polarity P P 1 m + V 5 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Bidirectional Pins and Feed back Lines (Programmable Logic Devices) I1 Ik Feedback IOm Three-state driver 6 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs PLA (Programmable Logic Array) (Programmable Logic Devices) If we use ROM to implement the Boolean function we will waste the silicon area. -

Development of a Programmable Array Logic
i DEVELOPMENT OF A PROGRAMMABLE ARRAY LOGIC PROGRAMMER USING A HOME COMPUTER by GERT DANIEL JORDAAN Dissertation submitted in compliance with the requirements for the MASTER'S DIPLOMA in TECHNOLOGY in the Department of Electronics at the TECHNIKON O. F . S . OCTOBER, 1988. Supervisor: Prof. F.W. Bruwer Co-supervisor: Mr. B. de Witt © Central University of Technology, Free State ACKNOWLEDGEMENTS I would like to thank the following persons without whose help this project could hardly have been completed: The supervisor, prof. F.W. Bruwer, and co-supervisor, mr. 8. de Witt, for help and guidance during the course of the project. Mr. H.F. Coetzer for technical as well as philolog ical assistance. It is really appreciated that time could be found in his very full schedule, for this assistance. Dr. C.A.J. van Rensburg for his per_onal interest in the research project and for continuous encouragement and help. Dr. J. van der Mer-we for his assistance - in particular with respect to the registration and other administrative aspects of the project. / Miss M. du Toit who was largely responsible for the word processing. For the guidance provided by my parents and the opportuni- ties which they afforded me. My children, Tania, Johan, Madelie and Lourens,. whose main contribution was to have to forego much of my attention and time for such a long period. Last, but not least, my wife, Christa, for her encouragement and understanding. © Central University of Technology,ii Free State CONTENTS PAGE Cilapter 1 1 Intr--oduc tion 1.1 Recent Trends in Electronics 1 1.2 Problem Investigated 1 1.3 Development of PAL Programmer 3 1.3.1 Generation of Fuse Map 3 1.3.2 Programming of Programmable Array Logic 3 Devices 1 . -

RESEARCH INSIGHTS – Hardware Design: FPGA Security Risks
RESEARCH INSIGHTS Hardware Design: FPGA Security Risks www.nccgroup.trust CONTENTS Author 3 Introduction 4 FPGA History 6 FPGA Development 10 FPGA Security Assessment 12 Conclusion 17 Glossary 18 References & Further Reading 19 NCC Group Research Insights 2 All Rights Reserved. © NCC Group 2015 AUTHOR DUNCAN HURWOOD Duncan is a senior consultant at NCC Group, specialising in telecom, embedded systems and application review. He has over 18 years’ experience within the telecom and security industry performing almost every role within the software development cycle from design and development to integration and product release testing. A dedicated security assessor since 2010, his consultancy experience includes multiple technologies, languages and platforms from web and mobile applications, to consumer devices and high-end telecom hardware. NCC Group Research Insights 3 All Rights Reserved. © NCC Group 2015 GLOSSARY AES Advanced encryption standard, a cryptography OTP One time programmable, allowing write once cipher only ASIC Application-specific integrated circuit, non- PCB Printed circuit board programmable hardware logic chip PLA Programmable logic array, forerunner of FPGA Bitfile Binary instruction file used to program FPGAs technology CLB Configurable logic block, an internal part of an PUF Physically unclonable function FPGA POWF Physical one-way function CPLD Complex programmable logic device PSoC Programmable system on chip, an FPGA and EEPROM Electronically erasable programmable read- other hardware on a single chip only memory -

Programmable Logic Design Quick Start Hand Book
Second Edition Programmable Logic Design Quick Start Hand Book By Karen Parnell & Nick Mehta January 2002 ABSTRACT Whether you design with discrete logic, base all of your designs on microcontrollers, or simply want to learn how to use the latest and most advanced programmable logic software, you will find this book an interesting insight into a different way to design. Programmable logic devices were invented in the late seventies and since then have proved to be very popular and are now one of the largest growing sectors in the semiconductor industry. Why are programmable logic devices so widely used? Programmable logic devices provide designers ultimate flexibility, time to market advantage, design integration, are easy to design with and can be reprogrammed time and time again even in the field to upgrade system functionality. This book was written to complement the popular XilinxÒ Campus Seminar series but can also be used as a stand-alone tutorial and information source for the first of your many programmable logic designs. After you have finished your first design this book will prove useful as a reference guide or quick start handbook. The book details the history of programmable logic, where and how to use them, how to install the free, full functioning design software (Xilinx WebPACKä ISE included with this book) and then guides you through your first of many designs. There are also sections on VHDL and schematic capture design entry and finally a data bank of useful applications examples. We hope you find the book practical, informative and above all easy to use. -

CPLD and FPGA Architectures
ECE 428 Programmable ASIC Design CPLD and FPGA Architectures Haibo Wang ECE Department Southern Illinois University Carbondale, IL 62901 3-1 Definitions Field Programmable Device (FPD): — a general term that refers to any type of integrated circuit used for implementing digital hardware, where the chip can be configured by the end user to realize different designs. Programming of such a device often involves placing the chip into a special programming unit, but some chips can also be configured “in-system”. Another name for FPDs is programmable logic devices (PLDs). Source: S. Brown and J. Rose, FPGA and CPLD Architectures: A Tutorial, IEEE Design and Test of Computer, 1996 3-2 Classifications PLA — a Programmable Logic Array (PLA) is a relatively small FPD that contains two levels of logic, an AND- plane and an OR-plane, where both levels are programmable PAL — a Programmable Array Logic (PAL) is a relatively small FPD that has a programmable AND-plane followed by a fixed OR-plane SPLD — refers to any type of Simple PLD, usually either a PLA or PAL CPLD — a more Complex PLD that consists of an arrangement of multiple SPLD-like blocks on a single chip. FPGA — a Field-Programmable Gate Array is an FPD featuring a general structure that allows very high logic capacity. 3-3 PLA Programmable AND Plane Programmable OR Plane Programmable Node Un-programmed Connect Disconnect X Y O1 O2 O3 O4 X XY Y XY XY XY XX YY 3-4 PLA Programmable AND Plane Programmable OR Plane YZ XZ XYZ XY XY Z XY+YZ ?? XZ+XYZ 3-5 PAL Programmable AND Plane Fix OR Plane X Y O1 O2 O3 O4 3-6 PAL with Logic Expanders Programmable AND Plane Fix OR Plane ? Logic expanders 3-7 PLA v.s. -
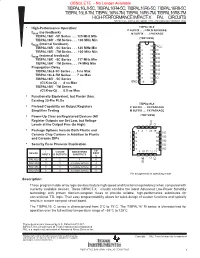
High-Performance Impact-X Programmable
OBSOLETE - No Longer Available TIBPAL16L8-5C, TIBPAL16R4-5C, TIBPAL16R6-5C, TIBPAL16R8-5C TIBPAL16L8-7M, TIBPAL16R4-7M, TIBPAL16R6-7M, TIBPAL16R8-7M HIGH-PERFORMANCE IMPACT-X PAL CIRCUITS SRPS011D – D3359, OCTOBER 1989 – REVISED SEPTEMBER 1992 • High-Performance Operation: TIBPAL16L8’ C SUFFIX . J OR N PACKAGE fmax (no feedback) M SUFFIX . J PACKAGE TIBPAL16R’ -5C Series . 125 MHz Min (TOP VIEW) TIBPAL16R’ -7M Series . 100 MHz Min f (internal feedback) max I 1 20 V TIBPAL16R’ -5C Series . 125 MHz Min CC I 2 19 O TIBPAL16R’ -7M Series . 100 MHz Min I 3 18 I/O f (external feedback) max I TIBPAL16R’ -5C Series . 117 MHz Min 4 17 I/O I TIBPAL16R’ -7M Series . 74 MHz Min 5 16 I/O I Propagation Delay 6 15 I/O I TIBPAL16L8-5C Series . 5 ns Max 7 14 I/O TIBPAL16L8-7M Series . 7 ns Max I 8 13 I/O TIBPAL16R’ -5C Series I 9 12 O (CLK-to-Q) . 4 ns Max GND 10 11 I TIBPAL16R ’ -7M Series (CLK-to-Q) . 6.5 ns Max • Functionally Equivalent, but Faster than, Existing 20-Pin PLDs TIBPAL16L8’ • Preload Capability on Output Registers C SUFFIX . FN PACKAGE Simplifies Testing M SUFFIX . FK PACKAGE • Power-Up Clear on Registered Devices (All (TOP VIEW) Register Outputs are Set Low, but Voltage CC I I I O Levels at the Output Pins Go High) V • Package Options Include Both Plastic and 3 2 1 20 19 I I/O Ceramic Chip Carriers in Addition to Plastic 4 18 I/O and Ceramic DIPs I 5 17 • I 6 16 I/O Security Fuse Prevents Duplication I 7 15 I/O I 8 14 I/O I/O I 3-STATE REGISTERED 910111213 PORT DEVICE INPUTS O OUTPUTS Q OUTPUTS S I I O ’PAL16L8 10 2 0 6 I/O ’PAL16R4 8 0 4 (3-state buffers) 4 GND ’PAL16R6 8 0 6 (3-state buffers) 2 ’PAL16R8 8 0 8 (3-state buffers) 0 Pin assignments in operating mode description These programmable array logic devices feature high speed and functional equivalency when compared with currently available devices. -

Ch7. Memory and Programmable Logic
EEA091 - Digital Logic 數位邏輯 Chapter 7 Memory and Programmable Logic 吳俊興 國立高雄大學 資訊工程學系 2006 Chapter 7 Memory and Programmable Logic 7-1 Introduction 7-2 Random-Access Memory 7-3 Memory Decoding 7-4 Error Detection and Correction 7-5 Read-Only Memory 7-6 Programmable Logic Array 7-7 Programmable Array Logic 7-8 Sequential Programmable Devices 7-1 Introduction • Memory unit –a collection of cells capable of storing a large quantity of binary information and • to which binary information is transferred for storage • from which information is available when needed for processing –together with associated circuits needed to transfer information in and out of the device • write operation: storing new information into memory • read operation: transferring the stored information out of the memory • Two major types –RAM (Random-access memory): Read + Write • accept new information for storage to be available later for use –ROM (Read-only memory): perform only read operation Programmable Logic Device •Programmable logic device (PLD) –an integrated circuit with internal logic gates • hundreds to millions of gates interconnected through hundreds to thousands of internal paths –connected through electronic paths that behave similar to fuse • In the original state, all the fuses are intact –programming the device • blowing those fuse along the paths that must be removed in order to obtain particular configuration of the desired logic function •Types –Read-only Memory (ROM, Section 7-5) –programmable logic array (PLA, Section 7-6) –programmable array -
No Slide Title
ECEN 248 –Introduction to Digital Systems Design (Spring 2008) (Sections: 501, 502, 503, 507) Prof. Xi Zhang ECE Dept, TAMU, 333N WERC http://www.ece.tamu.edu/~xizhang/ECEN248 Programmable logic device (PLD) A PLD is a general-purpose chip for implementing logic circuit. It contains a collection of logic circuit elements that can be customized in different ways. A PLD can be viewed as a “black box” that contains logic gates and programmable switches. The programmable switches allow the logic gates inside the PLD to be connected together to implement logic circuits. Programmable logic device as a black box Logic gates Inputs and Outputs (logic variables) programmable (logic functions) switches Figure 3.24. Programmable logic device as a black box. Programmable logic devices Different types of PLD Simple PLD (SPLD) Programmable logic array (PLA) Programmable array logic (PAL) Complex PLD (CPLD) Field-programmable gate arrays (FPGA) Programmable logic array (PLA) x1 x2 xn PLA is developed based on the sum-of-product form. A PLA includes a circuit Input buffers block called an AND plane and (or AND array) and a inverters circuit block called an OR plane (or OR array). x1 x1 xn xn Æ Input Buffer/inverters P Æ And plane Æ OR plane 1 Æ Output AND plane OR plane Pk f1 fm Figure 3.25. General structure of a PLA. Gate-level diagram of a PLA x1 x2 x3 Output of And plane: Programmable connections P1= x 1 x 2 OR plane P1 P2= x 1 x 3 P2 P3= x 1 x 2 x 3 P4= x 1 x 3 P3 Output of OR plane: P4 f1 x 1= x 2+ x 1 x 3+ x 1 x 2 x 3 AND plane f2 x 1= x 2+ x 1 x 2+ x 3 x 1 x 3 f1 f2 Figure 3.26. -

National Semiconductor Sales Lead Temperature Office/Distributors for Availability and Specifications
National preliminary Semiconductor PALI 0/10016PE8-3 (PLCC Only) 3 ns ECL ASPECT™ Programmable Array Logic ECL PAL10/10016PE8-3 ECL General Description The PAL10/10016PE8-3 is a member of the National Semi product term. Each output function is provided with output conductor 28-pin high speed ECL PAL® family. This device polarity fuses. These fuses permit the designer to configure utilizes National Semiconductor’s ASPECT (Advanced Sin each output independently to produce either a logic high (by gle Poly Emitter Coupled Technology) process with a newly leaving the fuse intact) or a logic low (by programming the developed tungsten fuse technology to provide the highest- fuse) when the equation defining that output is satisfied. speed user-programmable replacements for conventional Programming equipment and software make PAL design de ECL SSI-MSI logic with significant chip-count reduction. The velopment quick and easy. Programming is accomplished JEDEC fuse-map format and programming algorithm of this using TTL voltage levels and is therefore supported by in device is compatible with those of all prior ECL PAL prod dustry standard conventional TTL PLD programmers. After ucts from National. programming and verifying the logic array, an additional se Programmable logic devices provide convenient solutions curity fuse may be programmed to prevent direct copying of for a wide variety of applications— specific functions, includ proprietary logic designs. ing random logic, custom decoders, state machines, etc. By programming fuse links to configure AND/OR gate connec Features tions, the system designer can implement custom logic as ■ High speed: tpp 3 ns max convenient sum-of-products Boolean functions. -
Field Programmable Gate Array (FPGA)
Field Programmable Gate Array (FPGA) Wae Wolf, FPGA Based “ste Desig , 2004, Prentice Hall. INTRODUCTION TO PROGRAMMABLE LOGIC • Programmable logic requires both hardware and software. • Programmable logic devices can be programmed to Perform specified logic functions by the manufacturer or by the user. • One advantage of programmable logic over fixed-function logic is that the devices use much less board space for an equivalent amount of logic. • Another advantage is that, with programmable logic, designs can be readily changed without rewiring or replacing components. • Also, a logic design can generally be implemented faster and with less cost with programmable logic than with fixed-function ICs. Types of Programmable logic Devices • Many types of programmable logic are available, ranging from small devices that can replace a few fixed-function devices to complex high-density devices that can replace thousands of fixed-function devices. • Two major categories of user-programmable logic are PLD (programmable logic device) and FPGA (field programmable gate array). • PLDs are either SPLDs (simple PLDs) or CPLDs (complex PLDs). Simple Programmable logic Devices • The SPLD was the original PLD and is still available for small-scale applications. • Generally, an SPLD can replace up to ten fixed-function ICs and their interconnections, depending on the type of functions and the specific SPLD. • Most SPLDs are in one of two categories: PAL and GAL. • A PAL (programmable array logic) is a device that can be programmed one time. It consists of a programmable array of AND gates and a fixed array of OR gates. • A GAL (generic array logic) is a device that is basically a PAL that can be reprogrammed many times. -

Nasa Handbook Nasa-Hdbk 8739.23A Measurement
NASA HANDBOOK NASA-HDBK 8739.23A National Aeronautics and Space Administration Approved: 02-02-2016 Washington, DC 20546 Superseding: NASA-HDBK-8739.23 With Change 1 NASA COMPLEX ELECTRONICS HANDBOOK FOR ASSURANCE PROFESSIONALS MEASUREMENT SYSTEM IDENTIFICATION: METRIC APPROVED FOR PUBLIC RELEASE – DISTRIBUTION IS UNLIMITED NASA-HDBK 8739.23A—2016-02-02 Mars Exploration Rover (2003) 2 of 161 NASA-HDBK 8739.23A—2016-02-02 DOCUMENT HISTORY LOG Document Status Approval Date Description Revision Initial Release Baseline 2011-02-16 (JWL4) Editorial correction to page 2 figure caption Change 1 2011-03-29 (JWL4) Significant changes were made in this revision, including: expanded content; reflected terminology and technology from the NASA-HDBK-4008, Programmable Revision A 2016-02-02 Logic Devices (PLD) Handbook (released in 2013); eliminated duplication with the PLD Handbook; and, incorporated other clarifications and corrections. (MW) 3 of 161 NASA-HDBK 8739.23A—2016-02-02 This page intentionally left blank. 4 of 161 NASA-HDBK 8739.23A—2016-02-02 This page intentionally left blank. 6 of 161 NASA-HDBK 8739.23A—2016-02-02 TABLE OF CONTENTS 1 OVERVIEW ................................................................................................................ 12 1.1 Purpose .......................................................................................................................... 12 1.2 Scope ............................................................................................................................. 12 1.3 Anticipated -

Introduction to Programmable Logic Devices
Introduction to Programmable Logic Devices © 2015 Kael HANSON 1 Arbitrary Logic Tables ABC Minterm Maxterm P 0 0 0 A¯ · B¯ · C¯ A + B + C 0 Here we briefly review two strategies used in programmable 0 0 1 A¯ · B¯ · C A + B + C¯ 0 logic devices to realize arbitrary truth tables in digital hard- 0 1 0 A¯ · B · C¯ A + B¯ + C 1 ware: the sum-of-products which uses explicit ANDs and ¯ ¯ ¯ ORs, and the lookup table (LUT) method used in most mod- 0 1 1 A · B · C A + B + C 1 ern FPGAs and CPLDs. 1 0 0 A · B¯ · C¯ A¯ + B + C 0 1 0 1 A · B¯ · C A¯ + B + C¯ 1 · · ¯ ¯ ¯ 1.1 Sum of Products, &c. 1 1 0 A B C A + B + C 0 1 1 1 A · B · C A¯ + B¯ + C¯ 1 Classic programmable logic devices, PALs, GALs, and older CPLDs, implemented logic functions using combinations Table 1: Minterms and maxterms of 3 logic variables A, B, of ANDs and ORs. An arbitrary function of N boolean and C in a prime number truth table. variables may be expressed as the sum (OR) of product minterms or the product (AND) of sum maxterms, defined below. or POS: Minterm The minterms associated with N boolean vari- P2 = (A + B + C)(A + B + C¯)(A¯ + B + C)(A¯ + B¯ + C): (2) ables, faig are the product terms of all possible combi- N nations of faig and fa¯ig. There are 2 distinct terms. ¯ Perhaps an easier way to think of this is to construct It is easy to show that P1 = P2 using DeMorgan’s identity.