Tms320c28x CPU and Instruction Set Reference Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

KDE 2.0 Development, Which Is Directly Supported
23 8911 CH18 10/16/00 1:44 PM Page 401 The KDevelop IDE: The CHAPTER Integrated Development Environment for KDE by Ralf Nolden 18 IN THIS CHAPTER • General Issues 402 • Creating KDE 2.0 Applications 409 • Getting Started with the KDE 2.0 API 413 • The Classbrowser and Your Project 416 • The File Viewers—The Windows to Your Project Files 419 • The KDevelop Debugger 421 • KDevelop 2.0—A Preview 425 23 8911 CH18 10/16/00 1:44 PM Page 402 Developer Tools and Support 402 PART IV Although developing applications under UNIX systems can be a lot of fun, until now the pro- grammer was lacking a comfortable environment that takes away the usual standard activities that have to be done over and over in the process of programming. The KDevelop IDE closes this gap and makes it a joy to work within a complete, integrated development environment, combining the use of the GNU standard development tools such as the g++ compiler and the gdb debugger with the advantages of a GUI-based environment that automates all standard actions and allows the developer to concentrate on the work of writing software instead of managing command-line tools. It also offers direct and quick access to source files and docu- mentation. KDevelop primarily aims to provide the best means to rapidly set up and write KDE software; it also supports extended features such as GUI designing and translation in con- junction with other tools available especially for KDE development. The KDevelop IDE itself is published under the GNU Public License (GPL), like KDE, and is therefore publicly avail- able at no cost—including its source code—and it may be used both for free and for commer- cial development. -
E0C88 CORE CPU MANUAL NOTICE No Part of This Material May Be Reproduced Or Duplicated in Any Form Or by Any Means Without the Written Permission of Seiko Epson
MF658-04 CMOS 8-BIT SINGLE CHIP MICROCOMPUTER E0C88 Family E0C88 CORE CPU MANUAL NOTICE No part of this material may be reproduced or duplicated in any form or by any means without the written permission of Seiko Epson. Seiko Epson reserves the right to make changes to this material without notice. Seiko Epson does not assume any liability of any kind arising out of any inaccuracies contained in this material or due to its application or use in any product or circuit and, further, there is no representation that this material is applicable to products requiring high level reliability, such as medical products. Moreover, no license to any intellectual property rights is granted by implication or otherwise, and there is no representation or warranty that anything made in accordance with this material will be free from any patent or copyright infringement of a third party. This material or portions thereof may contain technology or the subject relating to strategic products under the control of the Foreign Exchange and Foreign Trade Control Law of Japan and may require an export license from the Ministry of International Trade and Industry or other approval from another government agency. Please note that "E0C" is the new name for the old product "SMC". If "SMC" appears in other manuals understand that it now reads "E0C". © SEIKO EPSON CORPORATION 1999 All rights reserved. CONTENTS E0C88 Core CPU Manual PREFACE This manual explains the architecture, operation and instruction of the core CPU E0C88 of the CMOS 8-bit single chip microcomputer E0C88 Family. Also, since the memory configuration and the peripheral circuit configuration is different for each device of the E0C88 Family, you should refer to the respective manuals for specific details other than the basic functions. -

ADSP-21065L SHARC User's Manual; Chapter 2, Computation
&20387$7,2181,76 Figure 2-0. Table 2-0. Listing 2-0. The processor’s computation units provide the numeric processing power for performing DSP algorithms, performing operations on both fixed-point and floating-point numbers. Each computation unit executes instructions in a single cycle. The processor contains three computation units: • An arithmetic/logic unit (ALU) Performs a standard set of arithmetic and logic operations in both fixed-point and floating-point formats. • A multiplier Performs floating-point and fixed-point multiplication as well as fixed-point dual multiply/add or multiply/subtract operations. •A shifter Performs logical and arithmetic shifts, bit manipulation, field deposit and extraction operations on 32-bit operands and can derive exponents as well. ADSP-21065L SHARC User’s Manual 2-1 PM Data Bus DM Data Bus Register File Multiplier Shifter ALU 16 × 40-bit MR2 MR1 MR0 Figure 2-1. Computation units block diagram The computation units are architecturally arranged in parallel, as shown in Figure 2-1. The output from any computation unit can be input to any computation unit on the next cycle. The computation units store input operands and results locally in a ten-port register file. The Register File is accessible to the processor’s pro- gram memory data (PMD) bus and its data memory data (DMD) bus. Both of these buses transfer data between the computation units and internal memory, external memory, or other parts of the processor. This chapter covers these topics: • Data formats • Register File data storage and transfers -

PIPELINING and ASSOCIATED TIMING ISSUES Introduction: While
PIPELINING AND ASSOCIATED TIMING ISSUES Introduction: While studying sequential circuits, we studied about Latches and Flip Flops. While Latches formed the heart of a Flip Flop, we have explored the use of Flip Flops in applications like counters, shift registers, sequence detectors, sequence generators and design of Finite State machines. Another important application of latches and flip flops is in pipelining combinational/algebraic operation. To understand what is pipelining consider the following example. Let us take a simple calculation which has three operations to be performed viz. 1. add a and b to get (a+b), 2. get magnitude of (a+b) and 3. evaluate log |(a + b)|. Each operation would consume a finite period of time. Let us assume that each operation consumes 40 nsec., 35 nsec. and 60 nsec. respectively. The process can be represented pictorially as in Fig. 1. Consider a situation when we need to carry this out for a set of 100 such pairs. In a normal course when we do it one by one it would take a total of 100 * 135 = 13,500 nsec. We can however reduce this time by the realization that the whole process is a sequential process. Let the values to be evaluated be a1 to a100 and the corresponding values to be added be b1 to b100. Since the operations are sequential, we can first evaluate (a1 + b1) while the value |(a1 + b1)| is being evaluated the unit evaluating the sum is dormant and we can use it to evaluate (a2 + b2) giving us both |(a1 + b1)| and (a2 + b2) at the end of another evaluation period. -

How Data Hazards Can Be Removed Effectively
International Journal of Scientific & Engineering Research, Volume 7, Issue 9, September-2016 116 ISSN 2229-5518 How Data Hazards can be removed effectively Muhammad Zeeshan, Saadia Anayat, Rabia and Nabila Rehman Abstract—For fast Processing of instructions in computer architecture, the most frequently used technique is Pipelining technique, the Pipelining is consider an important implementation technique used in computer hardware for multi-processing of instructions. Although multiple instructions can be executed at the same time with the help of pipelining, but sometimes multi-processing create a critical situation that altered the normal CPU executions in expected way, sometime it may cause processing delay and produce incorrect computational results than expected. This situation is known as hazard. Pipelining processing increase the processing speed of the CPU but these Hazards that accrue due to multi-processing may sometime decrease the CPU processing. Hazards can be needed to handle properly at the beginning otherwise it causes serious damage to pipelining processing or overall performance of computation can be effected. Data hazard is one from three types of pipeline hazards. It may result in Race condition if we ignore a data hazard, so it is essential to resolve data hazards properly. In this paper, we tries to present some ideas to deal with data hazards are presented i.e. introduce idea how data hazards are harmful for processing and what is the cause of data hazards, why data hazard accord, how we remove data hazards effectively. While pipelining is very useful but there are several complications and serious issue that may occurred related to pipelining i.e. -

2.5 Classification of Parallel Computers
52 // Architectures 2.5 Classification of Parallel Computers 2.5 Classification of Parallel Computers 2.5.1 Granularity In parallel computing, granularity means the amount of computation in relation to communication or synchronisation Periods of computation are typically separated from periods of communication by synchronization events. • fine level (same operations with different data) ◦ vector processors ◦ instruction level parallelism ◦ fine-grain parallelism: – Relatively small amounts of computational work are done between communication events – Low computation to communication ratio – Facilitates load balancing 53 // Architectures 2.5 Classification of Parallel Computers – Implies high communication overhead and less opportunity for per- formance enhancement – If granularity is too fine it is possible that the overhead required for communications and synchronization between tasks takes longer than the computation. • operation level (different operations simultaneously) • problem level (independent subtasks) ◦ coarse-grain parallelism: – Relatively large amounts of computational work are done between communication/synchronization events – High computation to communication ratio – Implies more opportunity for performance increase – Harder to load balance efficiently 54 // Architectures 2.5 Classification of Parallel Computers 2.5.2 Hardware: Pipelining (was used in supercomputers, e.g. Cray-1) In N elements in pipeline and for 8 element L clock cycles =) for calculation it would take L + N cycles; without pipeline L ∗ N cycles Example of good code for pipelineing: §doi =1 ,k ¤ z ( i ) =x ( i ) +y ( i ) end do ¦ 55 // Architectures 2.5 Classification of Parallel Computers Vector processors, fast vector operations (operations on arrays). Previous example good also for vector processor (vector addition) , but, e.g. recursion – hard to optimise for vector processors Example: IntelMMX – simple vector processor. -
Most Computer Instructions Can Be Classified Into Three Categories
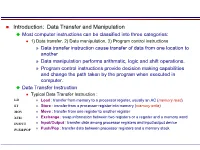
Introduction: Data Transfer and Manipulation Most computer instructions can be classified into three categories: 1) Data transfer, 2) Data manipulation, 3) Program control instructions » Data transfer instruction cause transfer of data from one location to another » Data manipulation performs arithmatic, logic and shift operations. » Program control instructions provide decision making capabilities and change the path taken by the program when executed in computer. Data Transfer Instruction Typical Data Transfer Instruction : LD » Load : transfer from memory to a processor register, usually an AC (memory read) ST » Store : transfer from a processor register into memory (memory write) MOV » Move : transfer from one register to another register XCH » Exchange : swap information between two registers or a register and a memory word IN/OUT » Input/Output : transfer data among processor registers and input/output device PUSH/POP » Push/Pop : transfer data between processor registers and a memory stack MODE ASSEMBLY REGISTER TRANSFER CONVENTION Direct Address LD ADR ACM[ADR] Indirect Address LD @ADR ACM[M[ADR]] Relative Address LD $ADR ACM[PC+ADR] Immediate Address LD #NBR ACNBR Index Address LD ADR(X) ACM[ADR+XR] Register LD R1 ACR1 Register Indirect LD (R1) ACM[R1] Autoincrement LD (R1)+ ACM[R1], R1R1+1 8 Addressing Mode for the LOAD Instruction Data Manipulation Instruction 1) Arithmetic, 2) Logical and bit manipulation, 3) Shift Instruction Arithmetic Instructions : NAME MNEMONIC Increment INC Decrement DEC Add ADD Subtract SUB Multiply -

Using the GNU Debugger (Gdb) a Debugger Is a Very Useful Tool for Finding Bugs in a Program
Using the GNU debugger (gdb) A debugger is a very useful tool for finding bugs in a program. You can interact with a program while it is running, start and stop it whenever, inspect the current values of variables and modify them, etc. If your program runs and crashes, it will produce a ‘core dump’. You can also use a debugger to look at the core dump and give you extra information about where the crash happened and what triggered it. Some debuggers (including recent versions of gdb) can also go backwards through your code: you run your code forwards in time to the point of an error, and then go backwards looking at the values of the key variables until you get to the start of the error. This can be slow but useful sometimes! To use a debugger effectively, you need to get the compiler to put extra ‘symbol’ information into the binary, otherwise all it will contain is machine code level – it is much more useful to have the actual variable names you used. To do this, you use: gfortran –g –O0 mycode.f90 –o mybinary where ‘-g’ is the compiler option to include extra symbols, -O0 is no optimization so the code is compiled exactly as written, and the output binary is called ’mybinary’. If the source files and executable file is in the same directory, then you can run the binary through the debugger by simply doing: gdb ./mybinary This will then put you into an interactive debugging session. Most commands can be shortened (eg ‘b’ instead of ‘break’) and pressing ‘enter’ will repeat the last command. -

The Central Processing Unit(CPU). the Brain of Any Computer System Is the CPU
Computer Fundamentals 1'stage Lec. (8 ) College of Computer Technology Dept.Information Networks The central processing unit(CPU). The brain of any computer system is the CPU. It controls the functioning of the other units and process the data. The CPU is sometimes called the processor, or in the personal computer field called “microprocessor”. It is a single integrated circuit that contains all the electronics needed to execute a program. The processor calculates (add, multiplies and so on), performs logical operations (compares numbers and make decisions), and controls the transfer of data among devices. The processor acts as the controller of all actions or services provided by the system. Processor actions are synchronized to its clock input. A clock signal consists of clock cycles. The time to complete a clock cycle is called the clock period. Normally, we use the clock frequency, which is the inverse of the clock period, to specify the clock. The clock frequency is measured in Hertz, which represents one cycle/second. Hertz is abbreviated as Hz. Usually, we use mega Hertz (MHz) and giga Hertz (GHz) as in 1.8 GHz Pentium. The processor can be thought of as executing the following cycle forever: 1. Fetch an instruction from the memory, 2. Decode the instruction (i.e., determine the instruction type), 3. Execute the instruction (i.e., perform the action specified by the instruction). Execution of an instruction involves fetching any required operands, performing the specified operation, and writing the results back. This process is often referred to as the fetch- execute cycle, or simply the execution cycle. -
Programming Model, Address Mode, HC12 Hardware Introduction
EEL 4744C: Microprocessor Applications Lecture 2 Programming Model, Address Mode, HC12 Hardware Introduction Dr. Tao Li 1 Reading Assignment • Microcontrollers and Microcomputers: Chapter 3, Chapter 4 • Software and Hardware Engineering: Chapter 2 Or • Software and Hardware Engineering: Chapter 4 Plus • CPU12 Reference Manual: Chapter 3 • M68HC12B Family Data Sheet: Chapter 1, 2, 3, 4 Dr. Tao Li 2 EEL 4744C: Microprocessor Applications Lecture 2 Part 1 CPU Registers and Control Codes Dr. Tao Li 3 CPU Registers • Accumulators – Registers that accumulate answers, e.g. the A Register – Can work simultaneously as the source register for one operand and the destination register for ALU operations • General-purpose registers – Registers that hold data, work as source and destination register for data transfers and source for ALU operations • Doubled registers – An N-bit CPU in general uses N-bit data registers – Sometimes 2 of the N-bit registers are used together to double the number of bits, thus “doubled” registers Dr. Tao Li 4 CPU Registers (2) • Pointer registers – Registers that address memory by pointing to specific memory locations that hold the needed data – Contain memory addresses (without offset) • Stack pointer registers – Pointer registers dedicated to variable data and return address storage in subroutine calls • Index registers – Also used to address memory – An effective memory address is found by adding an offset to the content of the involved index register Dr. Tao Li 5 CPU Registers (3) • Segment registers – In some architectures, memory addressing requires that the physical address be specified in 2 parts • Segment part: specifies a memory page • Offset part: specifies a particular place in the page • Condition code registers – Also called flag or status registers – Hold condition code bits generated when instructions are executed, e.g. -

Lecture Notes in Assembly Language
Lecture Notes in Assembly Language Short introduction to low-level programming Piotr Fulmański Łódź, 12 czerwca 2015 Spis treści Spis treści iii 1 Before we begin1 1.1 Simple assembler.................................... 1 1.1.1 Excercise 1 ................................... 2 1.1.2 Excercise 2 ................................... 3 1.1.3 Excercise 3 ................................... 3 1.1.4 Excercise 4 ................................... 5 1.1.5 Excercise 5 ................................... 6 1.2 Improvements, part I: addressing........................... 8 1.2.1 Excercise 6 ................................... 11 1.3 Improvements, part II: indirect addressing...................... 11 1.4 Improvements, part III: labels............................. 18 1.4.1 Excercise 7: find substring in a string .................... 19 1.4.2 Excercise 8: improved polynomial....................... 21 1.5 Improvements, part IV: flag register ......................... 23 1.6 Improvements, part V: the stack ........................... 24 1.6.1 Excercise 12................................... 26 1.7 Improvements, part VI – function stack frame.................... 29 1.8 Finall excercises..................................... 34 1.8.1 Excercise 13................................... 34 1.8.2 Excercise 14................................... 34 1.8.3 Excercise 15................................... 34 1.8.4 Excercise 16................................... 34 iii iv SPIS TREŚCI 1.8.5 Excercise 17................................... 34 2 First program 37 2.1 Compiling, -

The Birth, Evolution and Future of Microprocessor
The Birth, Evolution and Future of Microprocessor Swetha Kogatam Computer Science Department San Jose State University San Jose, CA 95192 408-924-1000 [email protected] ABSTRACT timed sequence through the bus system to output devices such as The world's first microprocessor, the 4004, was co-developed by CRT Screens, networks, or printers. In some cases, the terms Busicom, a Japanese manufacturer of calculators, and Intel, a U.S. 'CPU' and 'microprocessor' are used interchangeably to denote the manufacturer of semiconductors. The basic architecture of 4004 same device. was developed in August 1969; a concrete plan for the 4004 The different ways in which microprocessors are categorized are: system was finalized in December 1969; and the first microprocessor was successfully developed in March 1971. a) CISC (Complex Instruction Set Computers) Microprocessors, which became the "technology to open up a new b) RISC (Reduced Instruction Set Computers) era," brought two outstanding impacts, "power of intelligence" and "power of computing". First, microprocessors opened up a new a) VLIW(Very Long Instruction Word Computers) "era of programming" through replacing with software, the b) Super scalar processors hardwired logic based on IC's of the former "era of logic". At the same time, microprocessors allowed young engineers access to "power of computing" for the creative development of personal 2. BIRTH OF THE MICROPROCESSOR computers and computer games, which in turn led to growth in the In 1970, Intel introduced the first dynamic RAM, which increased software industry, and paved the way to the development of high- IC memory by a factor of four.