Robot Sensors and Actuators
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Actuator Product Guide
About Moog Multi-purpose Actuators and Servoactuators Moog’s multi-purpose actuators and servoactuators can be used for a variety of high performance applications and are standard building blocks used in ruggedized systems. We utilize our expertise in DC electromagnetics, gearing, rate and position loop servo electronics and mechanical design in these assemblies. Moog rotary and linear electromechancial actuators are used in: • Fixed and Rotary Wing Aircrafts • Unmanned Vehicles / Remotely Operated Vehicles • Ground Vehicles • Radar Systems • Remote Weapon Stations • SATCOM Pedestals • EO / IR Sensor Pods • Cockpit Door Locks • Valve / Damper Actuators Capability Moog has been developing specialized high technology and utility electromechanical actuators for over 25 years. Our capability includes in-house design, manufacturing expertise, engineering support and qualification for these products. Product Range Products range from 25 to 2,500 in-lbt for rotary and 100 to 2,000 lbf for linear configurations. We can offer our assemblies with integral servo control electronics. Moog offers a variety of communication interfaces including analog, (+/- 10 VDC for example), RS232 / 422 / 485, R/C PWM and CAN Bus. We design for redundancy as required by the customer. Moog is a FAA certified repair station and can offer hardware in support of AOG services. FAA / EASA Approved Repair Station Location, Springfield, PA FAA Repair Station: L17R251Y 750 West Sproul Road EASA (JAA): 145.5497 Springfield, PA 19064-4084 USA Cage Code: 1K426 Tel: +1-610-328-4000 Fax: +1-610-605-6216 FAA / EASA Approved Repair Station Location, Blacksburg, VA FAA Repair Station: 21MR057C 1213 North Main Street Cage Code: 99932 Blacksburg VA 24060-3127 USA Tel: +1-540-552-3011 Fax: +1-540-557-6719 2 Moog • www.moog.com Rotary Actuators Rotary Actuators Rotary servoactuators utilize brush and brushless type DC motors using both neodymium and rare earth magnets. -

Modern Design and Control of Automatic Transmission and The
Review Paper doi:10.5937/jaes13-7727 Paper number: 13(2015)1, 313, 51 - 59 MODERN DESIGN AND CONTROL OF AUTOMATIC TRANSMISSION AND THE PROSPECTS OF DEVELOPMENT Dejan Matijević The School of Electrical and Computer Engineering of Applied Studies, Belgrade, Serbia Ivan Ivanković* University of Belgrade, Faculty of Mechanical Engineering, Belgrade, Serbia Dr Vladimir Popović University of Belgrade, Faculty of Mechanical Engineering, Belgrade, Serbia The paper provides an overview of modern technical solutions of automatic transmissions in auto- motive industry with their influence on sustainable development. The objective of the first section is a structural view of specific constructions and control systems of presently used automatic transmis- sions, with emphasis on mechatronics implementation. The second section is based on perspectives of development, by integrating some branches of soft computing, such as fuzzy logic and artificial neural networks in order to create an optimal control algorithm for obtaining a contribution to fuel economy, exhaust emission, comfort and vehicle performance. Key words: Automatic transmission, Mechatronics, Automotive industry, Soft Computing INTRODUCTION which is depended by coefficient of friction and normal load on the drive axle. Lower limitation Almost all automobiles in use today are driven by is defined by maximal speed that vehicle can internal combustion engines, which are charac- reach. Shaded areas between traction forces terized by many advantages, such as relatively through gears are power losses. To decrease good efficiency, relatively compact energy stor- power losses and to be as closely as possible age and high power – to – weight ratio [07]. to the ideal traction hyperbola, the gearbox with But, fundamental disadvantages are: enough gear ratios is needed. -

Discrete Cosine Transform Based Image Fusion Techniques VPS Naidu MSDF Lab, FMCD, National Aerospace Laboratories, Bangalore, INDIA E.Mail: [email protected]
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by NAL-IR Journal of Communication, Navigation and Signal Processing (January 2012) Vol. 1, No. 1, pp. 35-45 Discrete Cosine Transform based Image Fusion Techniques VPS Naidu MSDF Lab, FMCD, National Aerospace Laboratories, Bangalore, INDIA E.mail: [email protected] Abstract: Six different types of image fusion algorithms based on 1 discrete cosine transform (DCT) were developed and their , k 1 0 performance was evaluated. Fusion performance is not good while N Where (k ) 1 and using the algorithms with block size less than 8x8 and also the block 1 2 size equivalent to the image size itself. DCTe and DCTmx based , 1 k 1 N 1 1 image fusion algorithms performed well. These algorithms are very N 1 simple and might be suitable for real time applications. 1 , k 0 Keywords: DCT, Contrast measure, Image fusion 2 N 2 (k 1 ) I. INTRODUCTION 2 , 1 k 2 N 2 1 Off late, different image fusion algorithms have been developed N 2 to merge the multiple images into a single image that contain all useful information. Pixel averaging of the source images k 1 & k 2 discrete frequency variables (n1 , n 2 ) pixel index (the images to be fused) is the simplest image fusion technique and it often produces undesirable side effects in the fused image Similarly, the 2D inverse discrete cosine transform is defined including reduced contrast. To overcome this side effects many as: researchers have developed multi resolution [1-3], multi scale [4,5] and statistical signal processing [6,7] based image fusion x(n1 , n 2 ) (k 1 ) (k 2 ) N 1 N 1 techniques. -

An Overview of Novel Actuators for Soft Robotics
actuators Review An Overview of Novel Actuators for Soft Robotics Pinar Boyraz 1,2,* ID , Gundula Runge 3 and Annika Raatz 3 1 Mechanics and Maritime Sciences Department, Chalmers University of Technology, 41296 Gothenburg, Sweden 2 Mechanical Engineering Department, Istanbul Technical University, Istanbul 34437, Turkey 3 Institut fur Montagetechnik (match), Leibniz Universität Hannover, 30823 Garbsen, Hannover, Germany; [email protected] (G.R.); [email protected] (A.R.) * Correspondence: [email protected]; Tel.: +46-730-49-8780 Received: 10 June 2018; Accepted: 9 August 2018; Published: 16 August 2018 Abstract: In this systematic survey, an overview of non-conventional actuators particularly used in soft-robotics is presented. The review is performed by using well-defined performance criteria with a direction to identify the exemplary and potential applications. In addition to this, initial guidelines to compare the performance and applicability of these novel actuators are provided. The meta-analysis is restricted to five main types of actuators: shape memory alloys (SMAs), fluidic elastomer actuators (FEAs), shape morphing polymers (SMPs), dielectric electro-activated polymers (DEAPs), and magnetic/electro-magnetic actuators (E/MAs). In exploring and comparing the capabilities of these actuators, the focus was on eight different aspects: compliance, topology-geometry, scalability-complexity, energy efficiency, operation range, modality, controllability, and technological readiness level (TRL). The overview presented here provides a state-of-the-art summary of the advancements and can help researchers to select the most convenient soft actuators using the comprehensive comparison of the suggested quantitative and qualitative criteria. Keywords: soft-robotics; actuator performance; SMA; SMP; FEA; DEAP; E/MA 1. -

Exlar Electric Test and Simulation Actuator Systems
Delivering more accurate and trouble-free test actuators. Exlar Electric Test and Simulation Actuator Systems Courtesy of Steven Engineering, Inc. - 230 Ryan Way, South San Francisco, CA 94080-5370 - Main Office: (650) 588-9200 - Outside Local Area: (800) 258-9200 - www.stevenengineering.com entertainment simulators, Exlar actutors are Paradigm Shift ergonomic endurance directly controlled in Mechanical test equipment, geo- by the system’s logical test equipment, electric servo Testing System wear testing, and even amplifi er. No Technology aircraft structural testing intermediary such and dynamic simulation. as oil or air is required to create Historically, manufacturers and motion. System users of mechanical test ap- The Benefi ts compliance result- paratus and motion simulators ing from use of have accepted the inaccuracies, of All-Electric fl uid power is a inconvenience and high mainte- Test Actuator major contributor nance costs of hydraulic actua- to inaccuracy of tion. However, today’s simula- Systems tors and test stands are often hydraulic actua- Exlar’s patented roller used in environments where tor systems. The screw linear actuator contamination from oil leaks is higher stiffness of technology allows users to not permissable and greater ac- a planetary perform the analysis and testing curacy is required. Exlar offers roller screw-based actuator pro- needed to verify products’ de- a full range of all-electric test vides greater system response actuators and position controls signs without the high cost of in- and stability assuring precise which provide the dynamic per- stallation, constant maintenance, and crisp control, and stiffness formance and long life required environmental issues, and en- is not stroke-sensitive. -

Actuator Components • Actuators – Hydraulics – Pneumatics – Electric Motors • Gearing • Bearings • Seals
Actuator Components • Actuators – Hydraulics – Pneumatics – Electric Motors • Gearing • Bearings • Seals U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 1 Fundamental Elements of Robotics Environment Planning Sensing and Actuation Reasoning U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 2 Prime Mover Taxonomy • Electrical – Direct Current – Alternating Current • Non-Electrical – Hydraulics – Pneumatics – Chemical – Thermal – Stored Energy U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 3 Hydraulics and Pneumatics U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 4 Pneumatic Actuator Cutaway U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 5 Hydraulic System Schematic U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 6 Hydraulic Spool Valve Schematic U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 7 Brushed DC Motor Schematic U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 8 DC Brushed Motor Schematic U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 9 Brushed DC Motor Commutator U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary Surface Robotics MARYLAND 10 Brushless DC Motor U N I V E R S I T Y O F Actuator Components ENAE 788X - Planetary -

Temperature Compensation Circuit for ISFET Sensor
Journal of Low Power Electronics and Applications Article Temperature Compensation Circuit for ISFET Sensor Ahmed Gaddour 1,2,* , Wael Dghais 2,3, Belgacem Hamdi 2,3 and Mounir Ben Ali 3,4 1 National Engineering School of Monastir (ENIM), University of Monastir, Monastir 5000, Tunisia 2 Electronics and Microelectronics Laboratory, LR99ES30, Faculty of Sciences of Monastir, University of Monastir, Monastir 5000, Tunisia; [email protected] (W.D.); [email protected] (B.H.) 3 Higher Institute of Applied Sciences and Technology of Sousse (ISSATSo), University of Sousse, Sousse 4003, Tunisia; [email protected] 4 Nanomaterials, Microsystems for Health, Environment and Energy Laboratory, LR16CRMN01, Centre for Research on Microelectronics and Nanotechnology, Sousse 4034, Tunisia * Correspondence: [email protected]; Tel.: +216-50998008 Received: 3 November 2019; Accepted: 21 December 2019; Published: 4 January 2020 Abstract: PH measurements are widely used in agriculture, biomedical engineering, the food industry, environmental studies, etc. Several healthcare and biomedical research studies have reported that all aqueous samples have their pH tested at some point in their lifecycle for evaluation of the diagnosis of diseases or susceptibility, wound healing, cellular internalization, etc. The ion-sensitive field effect transistor (ISFET) is capable of pH measurements. Such use of the ISFET has become popular, as it allows sensing, preprocessing, and computational circuitry to be encapsulated on a single chip, enabling miniaturization and portability. However, the extracted data from the sensor have been affected by the variation of the temperature. This paper presents a new integrated circuit that can enhance the immunity of ion-sensitive field effect transistors (ISFET) against the temperature. -

PI Linear Actuator Catalog
Linear Actuators for Precision Motion Control,/--5 Solutions featuring Novel Piezoelectric Motors and Classical Motors Latest PI Catalogs: www.pi.ws Latest PI Catalogs: www.pi.ws Precision Linear Actuators Overview Motion Control with Piezoelectric / Servo / Stepper Motors PI is the leading manufacturer of ultra-high-precision actua- tors for nanopositioning and micropositioning applications in industries such as Semi- conductors; Biotechnology and Medicine; Lasers, Optics, Micros- copy; Aerospace Engineering; Precision Machining; Astronomy and Microsystems Technology. Section a Section b Section c Motorized Screw Type Actuators PILine® Ceramic Ultrasonic Piezo NEXACT® Compact Piezo DC & Stepper Motors Motor Actuators Stepping Motor Actuators Forces to 400 N High-Speed Piezomotors and PiezoWalk® Drive Travel to 50 mm Drives Compact Dimensions Resolution to 50 nm Velocity to 800 mm/s Forces to 10 N Compact Dimensions <0.1 nm Resolution Travel to 150 mm (Basically Self-Locking at Rest Unlimited) Travel to 25 mm (Basically Forces to 7 N Unlimited) Self-Locking at Rest Velocity to 10 mm/s Resolution to 20 nm Non-Magnetic, Vacuum Non-Magnetic, Vacuum Compatible Compatible Section c Section d Section e Section f NEXLINE® High-Force Piezo Flexure-Guided Piezo Piezo Stack Actuators Motion Controllers (Examples) Stepping Motor Actuators Actuators PICMA® Multilayer and Controllers for Servo Motors PiezoWalk® Drive PICMA® Piezoceramic PICA™ Stack Actuators and Stepper Motors Non-Magnetic, Vacuum Multilayer -
A Novel MEMS Pressure Sensor with MOSFET on Chip
A Novel MEMS Pressure Sensor with MOSFET on Chip Zhao-Hua Zhang *, Yan-Hong Zhang, Li-Tian Liu, Tian-Ling Ren Tsinghua National Laboratory for Information Science and Technology Institute of Microelectronics, Tsinghua University Beijing 100084, China [email protected] Abstract—A novel MOSFET pressure sensor was proposed Figure 1. Two PMOSFET’s and two piezoresistors are based on the MOSFET stress sensitive phenomenon, in which connected to form a Wheatstone bridge. To obtain the the source-drain current changes with the stress in channel maximum sensitivity, these components are placed near the region. Two MOSFET’s and two piezoresistors were employed four sides of the silicon diaphragm, which are the high stress to form a Wheatstone bridge served as sensitive unit in the regions. The MOSFET’s has the same structure parameter novel sensor. Compared with the traditional piezoresistive W/L, same threshold voltage VT and gate-source voltage VGS pressure sensor, this MOSFET sensor’s sensitivity is improved (equal to VG-Vdd). They are designed to work in the significantly, meanwhile the power consumption can be saturation region. The piezoresistors also have the same decreased. The fabrication of the novel pressure sensor is low- resistance R . cost and compatible with standard IC process. It shows the 0 great promising application of MOSFET-bridge-circuit structure for the high performance pressure sensor. This kind of MEMS pressure sensor with signal process circuit on the same chip can be used in positive or negative Tire Pressure Monitoring System (TPMS) which is very hot in automotive electron research field. I. -

Simplifying Current Sensing (Rev. A)
Simplifying Current Sensing How to design with current sense amplifiers Table of contents Introduction . 3 Chapter 4: Integrating the current-sensing signal chain Chapter 1: Current-sensing overview Integrating the current-sensing signal path . 40 Integrating the current-sense resistor . 42 How integrated-resistor current sensors simplify Integrated, current-sensing PCB designs . 4 analog-to-digital converter . 45 Shunt-based current-sensing solutions for BMS Enabling Precision Current Sensing Designs with applications in HEVs and EVs . 6 Non-Ratiometric Magnetic Current Sensors . 48 Common uses for multichannel current monitoring . 9 Power and energy monitoring with digital Chapter 5: Wide VIN and isolated current sensors . 11 current measurement 12-V Battery Monitoring in an Automotive Module . 14 Simplifying voltage and current measurements in Interfacing a differential-output (isolated) amplifier battery test equipment . 17 to a single-ended-input ADC . 50 Extending beyond the maximum common-mode range of discrete current-sense amplifiers . 52 Chapter 2: Out-of-range current measurements Low-Drift, Precision, In-Line Isolated Magnetic Motor Current Measurements . 55 Measuring current to detect out-of-range conditions . 20 Monitoring current for multiple out-of-range Authors: conditions . 22 Scott Hill, Dennis Hudgins, Arjun Prakash, Greg Hupp, High-side motor current monitoring for overcurrent protection . 25 Scott Vestal, Alex Smith, Leaphar Castro, Kevin Zhang, Maka Luo, Raphael Puzio, Kurt Eckles, Guang Zhou, Chapter 3: Current sensing in Stephen Loveless, Peter Iliya switching systems Low-drift, precision, in-line motor current measurements with enhanced PWM rejection . 28 High-side drive, high-side solenoid monitor with PWM rejection . 30 Current-mode control in switching power supplies . -
Integrated Switch Current Sensor for Shortcircuit Protection and Current Control of 1.7-Kv Sic MOSFET Modules
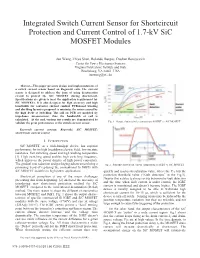
Integrated Switch Current Sensor for Shortcircuit Protection and Current Control of 1.7-kV SiC MOSFET Modules Jun Wang, Zhiyu Shen, Rolando Burgos, Dushan Boroyevich Center for Power Electronics Systems Virginia Polytechnic Institute and State Blacksburg, VA 24061, USA [email protected] Abstract—This paper presents design and implementations of a switch current sensor based on Rogowski coils. The current sensor is designed to address the issue of using desaturation circuit to protect the SiC MOSFET during shortcircuit. Specifications are given to meet the application requirement for SiC MOSFETs. It is also designed for high accuracy and high bandwidth for converter current control. PCB-based winding and shielding layout is proposed to minimize the noises caused by the high dv/dt at switching. The coil on PCB are modeled by impedance measurement, thus the bandwidth of coil is calculated. At the end, various test results are demonstrated to validate the great performance of the switch current sensor. Fig. 1. Output characteristics comparison: Si IGBT vs. SiC MOSFET Keywords—current sensing; Rogowski; SiC MOSFET; shortcircuit; current control I. INTRODUCTION SiC MOSFET, as a wide-bandgap device, has superior performance for its high breakdown electric field, low on-state resistance, fast switching speed and high working temperature [1]. High switching speed enables high switching frequency, which improves the power density of high power converters. The gradual cost reduction and packaging advancement bring a Fig. 2. Principle shortcircuit current comparison: Si IGBT vs. SiC MOSFET promising trend of replacing the conventional Si IGBTs with SiC MOSFET modules in high power applications. quickly and reaches its saturation value, where the VCE hits the Shortcircuit protection is one of the major challenges protection threshold value (“Fault detection” in the Fig.1). -

Electric Linear Actuators
LINEAR ACTUATORS Rolaram www.powerjacks.com LINEAR ACTUATORS | Rolaram www.powerjacks.com 2 LINEAR ACTUATORS | Rolaram Contents Linear Actuators (Electro-Mechanical) 1 Overview of Rolaram® Linear Actuator Range ................................................................4 2 Working Applications for Rolaram® Actuators ................................................................6 3 Product Code for Rolaram® Actuators ............................................................................7 4 Rolaram® Linear Actuator Range ....................................................................................8 5 How to Select a Rolaram® Actuator ..............................................................................10 6 Rolaram® Performance Data .........................................................................................11 7 Rolaram® Linear Actuator Dimensions .........................................................................17 8 Rolaram® Accessories and Options ...............................................................................21 9 Special Rolaram® Designs and Applications .................................................................22 3 www.powerjacks.com LINEAR ACTUATORS | Rolaram 1. Overview of Rolaram® Linear Actuator Range What is a Rolaram® Linear Actuator? Rolaram® is an electro-mechanical linear actuator, which consists of either a Spiracon™ planetary roller screw or a ball screw, driven by an electric motor, through a reduction gearbox. The lead screw converts rotary motion to