Lunar Observer Laser Altimeter Observations for Lunar Base - - Site Selection N 9 3 - 17 4 3 7
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cumulated Bibliography of Biographies of Ocean Scientists Deborah Day, Scripps Institution of Oceanography Archives Revised December 3, 2001
Cumulated Bibliography of Biographies of Ocean Scientists Deborah Day, Scripps Institution of Oceanography Archives Revised December 3, 2001. Preface This bibliography attempts to list all substantial autobiographies, biographies, festschrifts and obituaries of prominent oceanographers, marine biologists, fisheries scientists, and other scientists who worked in the marine environment published in journals and books after 1922, the publication date of Herdman’s Founders of Oceanography. The bibliography does not include newspaper obituaries, government documents, or citations to brief entries in general biographical sources. Items are listed alphabetically by author, and then chronologically by date of publication under a legend that includes the full name of the individual, his/her date of birth in European style(day, month in roman numeral, year), followed by his/her place of birth, then his date of death and place of death. Entries are in author-editor style following the Chicago Manual of Style (Chicago and London: University of Chicago Press, 14th ed., 1993). Citations are annotated to list the language if it is not obvious from the text. Annotations will also indicate if the citation includes a list of the scientist’s papers, if there is a relationship between the author of the citation and the scientist, or if the citation is written for a particular audience. This bibliography of biographies of scientists of the sea is based on Jacqueline Carpine-Lancre’s bibliography of biographies first published annually beginning with issue 4 of the History of Oceanography Newsletter (September 1992). It was supplemented by a bibliography maintained by Eric L. Mills and citations in the biographical files of the Archives of the Scripps Institution of Oceanography, UCSD. -

City of Graham Refuse Collection Zone
6 7 2 B 3 0 0 0 9 9 9 A 9 7 1 9 8 0 R 9 9 9 9 0 0 6 0 5 9 9 9 H 9 0 2 Z D 9 9 9 9 9 9 0 T 9 9 9 A 0 B C D E F G H I J N 9 0 9 0 T 9 1 1312 0 2199 2099 I 0 9 L 9 I 1 6 M 2 9 2 2 0 9 0 T 7 9 S 0 B 0 6 9 2 0 7 2 7 8 F E 7 A 3 7 9 L O L D L 1 1 D P 0 V 9 2 3 0 D 5 4 S UE S 2 A 7 7 9 T 2 O C 2 2 K 0 0 1 R 9 T H L A S G 3 1 7 E S N L L H 7 A N 0 A E S O D O T 6 R T 0 F E T 9 V E O 9 8 O I A 1 L P R E 4 M E S C L G S T 1 0 O R M 9 9 O O T A R C S O 9 0 6 IL G A P 9 0 A 0 9 F 7 S 2 M TT 2 IN W 0 L S R I V L U 0 0 H S 0 4 G D V 9 1 H T S 0 A A 9 W 9 N R 4 T 0 9 Y 9 1 L T I S 9 G W N S R S J O A V V 0 M N A 8 9 I A 9 R 9 5 V L L Y V V 0 T 9 ST M A S IEW R A N A E D T T 9 N 1 3 N I 0 1 N 9 E N 7 3 R E A H 6 D A 0 R 0 1 A O 9 9 S O R H 7 1 L 2 1 T 8 3 F 0 T L 2 9 H A U A M X M N R R 4 S R 9 G 5 I 0 1 3 O 0 A 1 S E 1 1 L L V D T S N N Y R I M 0 A T 1 D 4 I 0 O 0 I 7 E A 0 1 X W V 7 T P N 0 0 1 R PA E 9 M 8 R R K O G 0 9 E D 0 C 9 T E X R M 1 T W S Y 1 1 6 9 8 A T L I L S 7 H ST L 9 E ING O W L T T 9 K L 2 1 9 M 9 D 8 E R 9 8 9 A E H P 3 S E S A H 7 2 T 0 1 0 I 9 9 2 0 0 9 O 9 Y E W 5 9 N S C N T 1 L 3 L D R 0 0 U 1 H N A E E N R I 9 T R B 9 9 0 R NCY C M O T 6 OD L I S R H C W V 2 E R U A A O A L A D V Q T D W 1 A T 0 1 4 6 E 9 I 0 0 DR RY R I A N Y R 0 U O 1 D 0 D 2 0 0 E P E A 0 D T U 1 M B U S S A 2 6 S L 1 L T O 1 0 0 2 C 2 0 H B 1 H G S S D A 1 A 6 9 8 L L E 4 0 D 9 6 2 V C L 0 0 T 1 M E 2 12 C 6 1 9 I 2 0 7 3 1 E O S 6 E V 0 9 5 7 L S 30 8 0 A I 1 L 5 7 9 P 9 9 0 S 9 0 S N R N V 0 S D 3 T 5 L 9 E 0 T R 9 H O 0 0 E T T 1 C 9 D 1 1 13 O BIR NE -

Appendix I Lunar and Martian Nomenclature
APPENDIX I LUNAR AND MARTIAN NOMENCLATURE LUNAR AND MARTIAN NOMENCLATURE A large number of names of craters and other features on the Moon and Mars, were accepted by the IAU General Assemblies X (Moscow, 1958), XI (Berkeley, 1961), XII (Hamburg, 1964), XIV (Brighton, 1970), and XV (Sydney, 1973). The names were suggested by the appropriate IAU Commissions (16 and 17). In particular the Lunar names accepted at the XIVth and XVth General Assemblies were recommended by the 'Working Group on Lunar Nomenclature' under the Chairmanship of Dr D. H. Menzel. The Martian names were suggested by the 'Working Group on Martian Nomenclature' under the Chairmanship of Dr G. de Vaucouleurs. At the XVth General Assembly a new 'Working Group on Planetary System Nomenclature' was formed (Chairman: Dr P. M. Millman) comprising various Task Groups, one for each particular subject. For further references see: [AU Trans. X, 259-263, 1960; XIB, 236-238, 1962; Xlffi, 203-204, 1966; xnffi, 99-105, 1968; XIVB, 63, 129, 139, 1971; Space Sci. Rev. 12, 136-186, 1971. Because at the recent General Assemblies some small changes, or corrections, were made, the complete list of Lunar and Martian Topographic Features is published here. Table 1 Lunar Craters Abbe 58S,174E Balboa 19N,83W Abbot 6N,55E Baldet 54S, 151W Abel 34S,85E Balmer 20S,70E Abul Wafa 2N,ll7E Banachiewicz 5N,80E Adams 32S,69E Banting 26N,16E Aitken 17S,173E Barbier 248, 158E AI-Biruni 18N,93E Barnard 30S,86E Alden 24S, lllE Barringer 29S,151W Aldrin I.4N,22.1E Bartels 24N,90W Alekhin 68S,131W Becquerei -

Catalogues Par Titres-Textes Janvier 2009
fonds documentaire-NTA TEXTES classement au 15/01/2009 Classement par titre Titre texte Nom Auteur texte Prénom Adaption / doublon/ Titre du Année NB Textes / Nature Auteur texte Titre original Edition Collection N° coll p. Traduction quantité regroupement Edition document objet Trauma ABBOTT Jeff Cherche midi (le) Livre de 2006 506 Texte poche Reflet de Sam (le) ABIER Gilles Actes Sud - Heyoka 2002 46 1 Texte Papiers Jeunesse Jésus, Marie, Joseph! ABSOUS/ Philippe/ ABS éditions 17 Texte BEAUFILS/ BONNE/ Emmanuel/ CHEVROT/ Françoise/ DESGAGNE/ Michelle/ LAGUENS/ MARTIN Richard/ J-P./ Pascal Botte et sa chaussette ACHTERNBUSCH Herbert Der Stiefel und Fix René L'Arche 1994 2 Texte (la) sein Socken Ella ACHTERNBUSCH Herbert Ella Yersin Claude Botte et sa L'Arche 1994 3 Texte chaussette (la) / Ella / Susn Gust ACHTERNBUSCH Herbert 2 version papier Texte Gust ACHTERNBUSCH Herbert Gust Yersin Claude L'Arche 1984 61 1 Texte Sintflut ACHTERNBUSCH Herbert Theater Suhrkamp 1298 1986 13_64 7 Texte Susn ACHTERNBUSCH Herbert Susn Yersin Claude Botte et sa L'Arche 1994 3 Texte chaussette (la) / Ella / Susn Son du ciel austral (le) ACWORTH Elaine Composing Famchon (I.) 2 T.ACW 182 1122 Lansman Découverte 3 1995 77 1 Texte Venus du Théâtre australien Baye (la) ADRIEN Philippe Gourmandise Version papier 1967 2 Texte Ces feuilles de ma AHMED THIAM Thierno Funérailles d'un SEPIA 1994 255 14 Texte pauvritude cochon et 13 autres nouvelles Tac-tic à la rue des AKAKPO Gustave 4 petites comédies Lansman / 2004 7_16 4 Texte Pingouins pour une Comédie Comédie de vol. 2 Saint-Etienne Scènes de comédie ALAIN Avant-scène Avant-scène théâtre 188 1959 38_40 2 Texte théâtre (l') Page 1 fonds documentaire-NTA TEXTES classement au 15/01/2009 Classement par titre Nb Nb Nb Nb Genre Résumé Langue Nationalité Public Niveau Age Figurants pers H F Enfant roman Théâtre Parce que Sam est expulsé de l'école, il doit rester chez sa grand-mère. -

Graphical Evidence for the Solar Coronal Structure During the Maunder Minimum: Comparative Study of the Total Eclipse Drawings in 1706 and 1715
J. Space Weather Space Clim. 2021, 11,1 Ó H. Hayakawa et al., Published by EDP Sciences 2021 https://doi.org/10.1051/swsc/2020035 Available online at: www.swsc-journal.org Topical Issue - Space climate: The past and future of solar activity RESEARCH ARTICLE OPEN ACCESS Graphical evidence for the solar coronal structure during the Maunder minimum: comparative study of the total eclipse drawings in 1706 and 1715 Hisashi Hayakawa1,2,3,4,*, Mike Lockwood5,*, Matthew J. Owens5, Mitsuru Sôma6, Bruno P. Besser7, and Lidia van Driel – Gesztelyi8,9,10 1 Institute for Space-Earth Environmental Research, Nagoya University, 4648601 Nagoya, Japan 2 Institute for Advanced Researches, Nagoya University, 4648601 Nagoya, Japan 3 Science and Technology Facilities Council, RAL Space, Rutherford Appleton Laboratory, Harwell Campus, OX11 0QX Didcot, UK 4 Nishina Centre, Riken, 3510198 Wako, Japan 5 Department of Meteorology, University of Reading, RG6 6BB Reading, UK 6 National Astronomical Observatory of Japan, 1818588 Mitaka, Japan 7 Space Research Institute, Austrian Academy of Sciences, 8042 Graz, Austria 8 Mullard Space Science Laboratory, University College London, RH5 6NT Dorking, UK 9 LESIA, Observatoire de Paris, Université PSL, CNRS, Sorbonne Université, Université Paris Diderot, Sorbonne Paris Cité, 92195 Meudon, France 10 Konkoly Observatory, Hungarian Academy of Sciences, 1121 Budapest, Hungary Received 18 October 2019 / Accepted 29 June 2020 Abstract – We discuss the significant implications of three eye-witness drawings of the total solar eclipse on 1706 May 12 in comparison with two on 1715 May 3, for our understanding of space climate change. These events took place just after what has been termed the “deep Maunder Minimum” but fall within the “extended Maunder Minimum” being in an interval when the sunspot numbers start to recover. -

Modeling and Mapping of the Structural Deformation of Large Impact Craters on the Moon and Mercury
MODELING AND MAPPING OF THE STRUCTURAL DEFORMATION OF LARGE IMPACT CRATERS ON THE MOON AND MERCURY by JEFFREY A. BALCERSKI Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy Department of Earth, Environmental, and Planetary Sciences CASE WESTERN RESERVE UNIVERSITY August, 2015 CASE WESTERN RESERVE UNIVERSITY SCHOOL OF GRADUATE STUDIES We hereby approve the thesis/dissertation of Jeffrey A. Balcerski candidate for the degree of Doctor of Philosophy Committee Chair Steven A. Hauck, II James A. Van Orman Ralph P. Harvey Xiong Yu June 1, 2015 *we also certify that written approval has been obtained for any proprietary material contained therein ~ i ~ Dedicated to Marie, for her love, strength, and faith ~ ii ~ Table of Contents 1. Introduction ............................................................................................................1 2. Tilted Crater Floors as Records of Mercury’s Surface Deformation .....................4 2.1 Introduction ..............................................................................................5 2.2 Craters and Global Tilt Meters ................................................................8 2.3 Measurement Process...............................................................................12 2.3.1 Visual Pre-selection of Candidate Craters ................................13 2.3.2 Inspection and Inclusion/Exclusion of Altimetric Profiles .......14 2.3.3 Trend Fitting of Crater Floor Topography ................................16 2.4 Northern -

World Heritage Papers 7 ; Cultural Landscapes: the Challenges Of
Ferrara 7-couv 12/01/04 17:38 Page 1 7 World Heritage papers7 World Heritage papers Cultural Landscapes: Cultural Landscapes: the Challenges of Conservation of Challenges the Landscapes: Cultural the Challenges of Conservation World Heritage 2002 Shared Legacy, Common Responsibility Associated Workshops 11-12 November 2002 Ferrara - Italy For more information contact: paper; printed on chlorine free Cover paper interior printed on recycled RectoVerso Design by UNESCO World Heritage Centre papers 7, place de Fontenoy 75352 Paris 07 SP France Tel : 33 (0)1 45 68 15 71 Fax : 33 (0)1 45 68 55 70 E-mail : [email protected] orld Heritage W http://whc.unesco.org/venice2002 photo:Cover Delta © Studio B&G Po Ferrara 7 12/01/04 17:34 Page 1 Cultural Landscapes: the Challenges of Conservation World Heritage 2002 Shared Legacy, Common Responsibility Associated Workshops 11-12 November 2002 Ferrara - Italy Hosted by the Province of Ferrara and the City of Ferrara Organized by the University of Ferrara and UNESCO’s World Heritage Centre in collaboration with ICCROM, ICOMOS and IUCN With the support of the Nordic World Heritage Foundation (NWHF) and the Dutch Ministry of Education, Culture and Sciences (OCenW) Ferrara 7 12/01/04 17:34 Page 2 Disclaimer The authors are responsible for the choice and presentation of the facts contained in this publication and for the opinions therein, which are not necessarily those of UNESCO and do not commit the Organization. The designation employed and the presentation of the material throughout this publication do not imply the expression of any opinion whatsoever on the part of UNESCO concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries. -

GRAIL Gravity Observations of the Transition from Complex Crater to Peak-Ring Basin on the Moon: Implications for Crustal Structure and Impact Basin Formation
Icarus 292 (2017) 54–73 Contents lists available at ScienceDirect Icarus journal homepage: www.elsevier.com/locate/icarus GRAIL gravity observations of the transition from complex crater to peak-ring basin on the Moon: Implications for crustal structure and impact basin formation ∗ David M.H. Baker a,b, , James W. Head a, Roger J. Phillips c, Gregory A. Neumann b, Carver J. Bierson d, David E. Smith e, Maria T. Zuber e a Department of Geological Sciences, Brown University, Providence, RI 02912, USA b NASA Goddard Space Flight Center, Greenbelt, MD 20771, USA c Department of Earth and Planetary Sciences and McDonnell Center for the Space Sciences, Washington University, St. Louis, MO 63130, USA d Department of Earth and Planetary Sciences, University of California, Santa Cruz, CA 95064, USA e Department of Earth, Atmospheric and Planetary Sciences, MIT, Cambridge, MA 02139, USA a r t i c l e i n f o a b s t r a c t Article history: High-resolution gravity data from the Gravity Recovery and Interior Laboratory (GRAIL) mission provide Received 14 September 2016 the opportunity to analyze the detailed gravity and crustal structure of impact features in the morpho- Revised 1 March 2017 logical transition from complex craters to peak-ring basins on the Moon. We calculate average radial Accepted 21 March 2017 profiles of free-air anomalies and Bouguer anomalies for peak-ring basins, protobasins, and the largest Available online 22 March 2017 complex craters. Complex craters and protobasins have free-air anomalies that are positively correlated with surface topography, unlike the prominent lunar mascons (positive free-air anomalies in areas of low elevation) associated with large basins. -

Macrobiont: Cradle for the Origin of Life and Creation of a Biosphere
life Article Macrobiont: Cradle for the Origin of Life and Creation of a Biosphere Benton C. Clark 1,* and Vera M. Kolb 2 1 Space Science Institute, Boulder, CO 80301, USA 2 Department of Chemistry, University of Wisconsin—Parkside, Kenosha, WI 53141, USA; [email protected] * Correspondence: [email protected] Received: 4 October 2020; Accepted: 9 November 2020; Published: 12 November 2020 Abstract: Although the cellular microorganism is the fundamental unit of biology, the origin of life (OoL) itself is unlikely to have occurred in a microscale environment. The macrobiont (MB) is the macro-scale setting where life originated. Guided by the methodologies of Systems Analysis, we focus on subaerial ponds of scale 3 to 300 m diameter. Within such ponds, there can be substantial heterogeneity, on the vertical, horizontal, and temporal scales, which enable multi-pot prebiotic chemical evolution. Pond size-sensitivities for several figures of merit are mathematically formulated, leading to the expectation that the optimum pond size for the OoL is intermediate, but biased toward smaller sizes. Sensitivities include relative access to nutrients, energy sources, and catalysts, as sourced from geological, atmospheric, hydrospheric, and astronomical contributors. Foreshores, especially with mudcracks, are identified as a favorable component for the success of the macrobiont. To bridge the gap between inanimate matter and a planetary-scale biosphere, five stages of evolution within the macrobiont are hypothesized: prebiotic chemistry molecular replicator protocell ! ! macrobiont cell colonizer cell. Comparison of ponds with other macrobionts, including ! ! hydrothermal and meteorite settings, allows a conclusion that more than one possible macrobiont locale could enable an OoL. -

13. Martian Cratering and Implications for the Chronostratigraphy
13. Martian Cratering and Implications for the Chronostratigraphy The record of large impact basins on differ- ent planetary bodies allows us to compare the characteristics of the heavy bombardment pe- riod and the end of planetary formation. Both the cratering record itself and the age distri- bution of the impact basins represent the pe- riod of highest impactor flux, decaying rapidly within the first half billion years of our solar system. In order to test the plausibility of the Martian chronology model (see Chapter 5), the ages of the large Martian impact basins, using the derived Martian production function, were determined and compared to lunar basin ages. For the Moon, the large basins were produced no later than about 3.8 to 3.9 Ga ago and a similar situation should exist for Mars, follow- ing the marker horizon idea (Wetherill, 1975). This idea is based on the assumption that solar system bodies have undergone a similar evo- lution since planetary formation. In the cra- Figure 13.1.: The crater size frequency distribu- tering record on any solid surface body, which tion measured for one of the oldest regions on Mars: has representative large old surface units, this Noachis Terra (map nomenclature: unit Npl1). first period of heavy bombardment is present in the general crater size–frequency distribution as well as the large basin record itself. According to our investigation, the oldest surface areas on than the visible highland surface, where crater Mars, roughly the Martian southern highlands, count ages are based on craters clearly recog- e. g. Noachis Terra, were formed between 4.0 nized by their morphology. -

New Views of Lunar Geoscience: an Introduction and Overview Harald Hiesinger and James W
Reviews in Mineralogy & Geochemistry Vol. 60, pp. XXX-XXX, 2006 1 Copyright © Mineralogical Society of America New Views of Lunar Geoscience: An Introduction and Overview Harald Hiesinger and James W. Head III Department of Geological Sciences Brown University Box 1846 Providence, Rhode Island, 02912, U.S.A. [email protected] [email protected] 1.1. INTRODUCTION Beyond the Earth, the Moon is the only planetary body for which we have samples from known locations. The analysis of these samples gives us “ground-truth” for numerous remote sensing studies of the physical and chemical properties of the Moon and they are invaluable for our fundamental understanding of lunar origin and evolution. Prior to the return of the Apollo 11 samples, the Moon was thought by many to be a primitive undifferentiated body (e.g., Urey 1966), a concept shattered by the data returned from the Apollo and Luna missions. Ever since, new data have helped to address some of our questions, but of course, they also produced new questions. In this chapter we provide a summary of knowledge about lunar geologic processes and we describe major scienti! c advancements of the last decade that are mainly related to the most recent lunar missions such as Galileo, Clementine, and Lunar Prospector. 1.1.1. The Moon in the planetary context Compared to terrestrial planets, the Moon is unique in terms of its bulk density, its size, and its origin (Fig. 1.1a-c), all of which have profound effects on its thermal evolution and the formation of a secondary crust (Fig. 1.1d). -
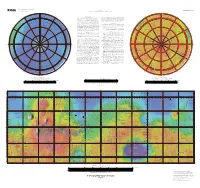
Topographic Map of Mars
U.S. DEPARTMENT OF THE INTERIOR OPEN-FILE REPORT 02-282 U.S. GEOLOGICAL SURVEY Prepared for the NATIONAL AERONAUTICS AND SPACE ADMINISTRATION 180° 0° 55° –55° Russell Stokes 150°E NOACHIS 30°E 210°W 330°W 210°E NOTES ON BASE smooth global color look-up table. Note that the chosen color scheme simply 330°E Darwin 150°W This map is based on data from the Mars Orbiter Laser Altimeter (MOLA) 30°W — 60° represents elevation changes and is not intended to imply anything about –60° Chalcoporous v (Smith and others 2001), an instrument on NASA’s Mars Global Surveyor Milankovic surface characteristics (e.g. past or current presence of water or ice). These two (MGS) spacecraft (Albee and others 2001). The image used for the base of this files were then merged and scaled to 1:25 million for the Mercator portion and Rupes map represents more than 600 million measurements gathered between 1999 1:15,196,708 for the two Polar Stereographic portions, with a resolution of 300 and 2001, adjusted for consistency (Neumann and others 2001 and 2002) and S dots per inch. The projections have a common scale of 1:13,923,113 at ±56° TIA E T converted to planetary radii. These have been converted to elevations above the latitude. N S B LANI O A O areoid as determined from a martian gravity field solution GMM2 (Lemoine Wegener a R M S s T u and others 2001), truncated to degree and order 50, and oriented according to IS s NOMENCLATURE y I E t e M i current standards (see below).