Generate Viewsheds of Mastcam Images from the Curiosity Rover, 3 Using Arcgis® and Public Datasets
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
VI FORSKER PÅ MARS Kort Om Aktiviteten I Mange Tiår Har Mars Vært Et Yndet Objekt for Forskere Verden Over
VI FORSKER PÅ MARS Kort om aktiviteten I mange tiår har Mars vært et yndet objekt for forskere verden over. Men hvorfor det? Hva er det med den røde planeten som er så interessant? Her forsøker vi å gi en oversikt over hvorfor vi er så opptatt av Mars. Hva har vi oppdaget, og hva er det vi tenker å gjøre? Det finnes en planet i solsystemet vårt som bare er bebodd av roboter -MARS- Læringsmål Elevene skal kunne - gi eksempler på dagsaktuell forskning og drøfte hvordan ny kunnskap genereres gjennom samarbeid og kritisk tilnærming til eksisterende kunnskap - utforske, forstå og lage teknologiske systemer som består av en sender og en mottaker - gjøre rede for energibevaring og energikvalitet og utforske ulike måter å omdanne, transportere og lagre energi på VI FORSKER PÅ MARS side 1 Innhold Kort om aktiviteten ................................................................................................................................ 1 Læringsmål ................................................................................................................................................ 1 Mars gjennom historien ...................................................................................................................... 3 Romkappløp mot Mars ................................................................................................................... 3 2000-tallet gir rovere i fleng ....................................................................................................... 4 Hva nå? ...................................................................................................................................................... -

9Th Grade Ela
9TH GRADE ELA Week of: MAY 11TH WICHITA PUBLIC SCHOOLS 9th, 10th, 11th and 12th Grades Your child should spend up to 90 minutes over the course of each day on this packet. Consider other family-friendly activities during the day such as: Learn how to do laundry. Create a cartoon image Make a bucket list of Look up riddles to Wash the laundry, of your family. things to do after the solve with someone fold and put the quarantine is over with in your family. laundry away. your family. Mindful Minute: Write Do a random act of Teach someone in your Put together a puzzle down what a typical day kindness for someone in family to play one of your with your family. was like pre-quarantine your house. video games. and during quarantine. How have things changed? *All activities are optional. Parents/Guardians please practice responsibility, safety, and supervision. For students with an Individualized Education Program (IEP) who need additional support, Parents/Guardians can refer to the Specialized Instruction and Supports webpage, contact their child’s IEP manager, and/or speak to the special education provider when you are contacted by them. Contact the IEP manager by emailing them directly or by contacting the school. The Specialized Instruction and Supports webpage can be accessed by clicking HERE or by navigating in a web browser to https://www.usd259.org/Page/17540 WICHITA PUBLIC SCHOOLS CONTINUOUS LEARNING HOTLINE AVAILABLE 316-973-4443 MARCH 30 – MAY 21, 2020 MONDAY – FRIDAY 11:00 AM – 1:00 PM ONLY For Multilingual Education Services (MES) support, please call (316) 866-8000 (Spanish and Proprio) or (316) 866-8003 (Vietnamese). -

Generate Viewsheds of Mastcam Images from the Curiosity Rover, Using Arcgis® and Public Datasets
TECHNICAL Coupling Mars Ground and Orbital Views: Generate REPORTS: METHODS Viewsheds of Mastcam Images From the Curiosity 10.1029/2020EA001247 Rover, Using ArcGIS® and Public Datasets Key Points: 1 2 1 3 4 • Mastcam images from the Curiosity M. Nachon , S. Borges , R. C. Ewing , F. Rivera‐Hernández , N. Stein , and rover are available online but lack a J. K. Van Beek5 public method to be placed back in the Mars orbital context 1Department of Geology and Geophysics, Texas A&M University, College Station, TX, USA, 2Department of Astronomy • This procedure allows users to and Planetary Sciences—College of Engineering, Forestry, and Natural Sciences, Northern Arizona University, Flagstaff, generate Mastcam image viewsheds: 3 4 locate in a map view the Mars AZ, USA, Department of Earth Sciences, Dartmouth College, Hanover, NH, USA, Division of Geological and Planetary 5 terrains visible in Mastcam images Sciences, California Institute of Technology, Pasadena, CA, USA, Malin Space Science Systems, San Diego, CA, USA • This procedure uses ArcGIS® and publicly available Mars datasets Abstract The Mastcam (Mast Camera) instrument onboard the NASA Curiosity rover provides an Supporting Information: exclusive view of Mars: High‐resolution color images from Mastcam allow users to study Gale crater's • Dataset S1 geologic terrains along Curiosity's path. These ground observations complement the spatially broader • Dataset S2 • Dataset S3 views of Gale crater provided by spacecrafts from orbit. However, for a given Mastcam image, it can be • Table S1 challenging to locate the corresponding terrains on the orbital view. No method for locating Mastcam images • Table S2 onto orbital images had been made publicly available. -

Martian Crater Morphology
ANALYSIS OF THE DEPTH-DIAMETER RELATIONSHIP OF MARTIAN CRATERS A Capstone Experience Thesis Presented by Jared Howenstine Completion Date: May 2006 Approved By: Professor M. Darby Dyar, Astronomy Professor Christopher Condit, Geology Professor Judith Young, Astronomy Abstract Title: Analysis of the Depth-Diameter Relationship of Martian Craters Author: Jared Howenstine, Astronomy Approved By: Judith Young, Astronomy Approved By: M. Darby Dyar, Astronomy Approved By: Christopher Condit, Geology CE Type: Departmental Honors Project Using a gridded version of maritan topography with the computer program Gridview, this project studied the depth-diameter relationship of martian impact craters. The work encompasses 361 profiles of impacts with diameters larger than 15 kilometers and is a continuation of work that was started at the Lunar and Planetary Institute in Houston, Texas under the guidance of Dr. Walter S. Keifer. Using the most ‘pristine,’ or deepest craters in the data a depth-diameter relationship was determined: d = 0.610D 0.327 , where d is the depth of the crater and D is the diameter of the crater, both in kilometers. This relationship can then be used to estimate the theoretical depth of any impact radius, and therefore can be used to estimate the pristine shape of the crater. With a depth-diameter ratio for a particular crater, the measured depth can then be compared to this theoretical value and an estimate of the amount of material within the crater, or fill, can then be calculated. The data includes 140 named impact craters, 3 basins, and 218 other impacts. The named data encompasses all named impact structures of greater than 100 kilometers in diameter. -

11 Fall Unamagazine
FALL 2011 • VOLUME 19 • No. 3 FOR ALUMNI AND FRIENDS OF THE UNIVERSITY OF NORTH ALABAMA Cover Story 10 ..... Thanks a Million, Harvey Robbins Features 3 ..... The Transition 14 ..... From Zero to Infinity 16 ..... Something Special 20 ..... The Sounds of the Pride 28 ..... Southern Laughs 30 ..... Academic Affairs Awards 33 ..... Excellence in Teaching Award 34 ..... China 38 ..... Words on the Breeze Departments 2 ..... President’s Message 6 ..... Around the Campus 45 ..... Class Notes 47 ..... In Memory FALL 2011 • VOLUME 19 • No. 3 for alumni and friends of the University of North Alabama president’s message ADMINISTRATION William G. Cale, Jr. President William G. Cale, Jr. The annual everyone to attend one of these. You may Vice President for Academic Affairs/Provost Handy festival contact Dr. Alan Medders (Vice President John Thornell is drawing large for Advancement, [email protected]) Vice President for Business and Financial Affairs crowds to the many or Mr. Mark Linder (Director of Athletics, Steve Smith venues where music [email protected]) for information or to Vice President for Student Affairs is being played. At arrange a meeting for your group. David Shields this time of year Sometimes we measure success by Vice President for University Advancement William G. Cale, Jr. it is impossible the things we can see, like a new building. Alan Medders to go anywhere More often, though, success happens one Vice Provost for International Affairs in town and not hear music. The festival student at a time as we provide more and Chunsheng Zhang is also a reminder that we are less than better educational opportunities. -

Workshop on the Martiannorthern Plains: Sedimentological,Periglacial, and Paleoclimaticevolution
NASA-CR-194831 19940015909 WORKSHOP ON THE MARTIANNORTHERN PLAINS: SEDIMENTOLOGICAL,PERIGLACIAL, AND PALEOCLIMATICEVOLUTION MSATT ..V",,2' :o_ MarsSurfaceandAtmosphereThroughTime Lunar and PlanetaryInstitute 3600 Bay AreaBoulevard Houston TX 77058-1113 ' _ LPI/TR--93-04Technical, Part 1 Report Number 93-04, Part 1 L • DISPLAY06/6/2 94N20382"£ ISSUE5 PAGE2088 CATEGORY91 RPT£:NASA-CR-194831NAS 1.26:194831LPI-TR-93-O4-PT-ICNT£:NASW-4574 93/00/00 29 PAGES UNCLASSIFIEDDOCUMENT UTTL:Workshopon the MartianNorthernPlains:Sedimentological,Periglacial, and PaleoclimaticEvolution TLSP:AbstractsOnly AUTH:A/KARGEL,JEFFREYS.; B/MOORE,JEFFREY; C/PARKER,TIMOTHY PAA: A/(GeologicalSurvey,Flagstaff,AZ.); B/(NationalAeronauticsand Space Administration.GoddardSpaceFlightCenter,Greenbelt,MD.); C/(Jet PropulsionLab.,CaliforniaInst.of Tech.,Pasadena.) PAT:A/ed.; B/ed.; C/ed. CORP:Lunarand PlanetaryInst.,Houston,TX. SAP: Avail:CASIHC A03/MFAOI CIO: UNITEDSTATES Workshopheld in Fairbanks,AK, 12-14Aug.1993;sponsored by MSATTStudyGroupandAlaskaUniv. MAJS:/*GLACIERS/_MARSSURFACE/*PLAINS/*PLANETARYGEOLOGY/*SEDIMENTS MINS:/ HYDROLOGICALCYCLE/ICE/MARS CRATERS/MORPHOLOGY/STRATIGRAPHY ANN: Papersthathavebeen acceptedforpresentationat the Workshopon the MartianNorthernPlains:Sedimentological,Periglacial,and Paleoclimatic Evolution,on 12-14Aug. 1993in Fairbanks,Alaskaare included.Topics coveredinclude:hydrologicalconsequencesof pondedwateron Mars; morpho!ogical and morphometric studies of impact cratersin the Northern Plainsof Mars; a wet-geology and cold-climateMarsmodel:punctuation -

“Mining” Water Ice on Mars an Assessment of ISRU Options in Support of Future Human Missions
National Aeronautics and Space Administration “Mining” Water Ice on Mars An Assessment of ISRU Options in Support of Future Human Missions Stephen Hoffman, Alida Andrews, Kevin Watts July 2016 Agenda • Introduction • What kind of water ice are we talking about • Options for accessing the water ice • Drilling Options • “Mining” Options • EMC scenario and requirements • Recommendations and future work Acknowledgement • The authors of this report learned much during the process of researching the technologies and operations associated with drilling into icy deposits and extract water from those deposits. We would like to acknowledge the support and advice provided by the following individuals and their organizations: – Brian Glass, PhD, NASA Ames Research Center – Robert Haehnel, PhD, U.S. Army Corps of Engineers/Cold Regions Research and Engineering Laboratory – Patrick Haggerty, National Science Foundation/Geosciences/Polar Programs – Jennifer Mercer, PhD, National Science Foundation/Geosciences/Polar Programs – Frank Rack, PhD, University of Nebraska-Lincoln – Jason Weale, U.S. Army Corps of Engineers/Cold Regions Research and Engineering Laboratory Mining Water Ice on Mars INTRODUCTION Background • Addendum to M-WIP study, addressing one of the areas not fully covered in this report: accessing and mining water ice if it is present in certain glacier-like forms – The M-WIP report is available at http://mepag.nasa.gov/reports.cfm • The First Landing Site/Exploration Zone Workshop for Human Missions to Mars (October 2015) set the target -

Mariner to Mercury, Venus and Mars
NASA Facts National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, CA 91109 Mariner to Mercury, Venus and Mars Between 1962 and late 1973, NASA’s Jet carry a host of scientific instruments. Some of the Propulsion Laboratory designed and built 10 space- instruments, such as cameras, would need to be point- craft named Mariner to explore the inner solar system ed at the target body it was studying. Other instru- -- visiting the planets Venus, Mars and Mercury for ments were non-directional and studied phenomena the first time, and returning to Venus and Mars for such as magnetic fields and charged particles. JPL additional close observations. The final mission in the engineers proposed to make the Mariners “three-axis- series, Mariner 10, flew past Venus before going on to stabilized,” meaning that unlike other space probes encounter Mercury, after which it returned to Mercury they would not spin. for a total of three flybys. The next-to-last, Mariner Each of the Mariner projects was designed to have 9, became the first ever to orbit another planet when two spacecraft launched on separate rockets, in case it rached Mars for about a year of mapping and mea- of difficulties with the nearly untried launch vehicles. surement. Mariner 1, Mariner 3, and Mariner 8 were in fact lost The Mariners were all relatively small robotic during launch, but their backups were successful. No explorers, each launched on an Atlas rocket with Mariners were lost in later flight to their destination either an Agena or Centaur upper-stage booster, and planets or before completing their scientific missions. -
Elements of Astronomy and Cosmology Outline 1
ELEMENTS OF ASTRONOMY AND COSMOLOGY OUTLINE 1. The Solar System The Four Inner Planets The Asteroid Belt The Giant Planets The Kuiper Belt 2. The Milky Way Galaxy Neighborhood of the Solar System Exoplanets Star Terminology 3. The Early Universe Twentieth Century Progress Recent Progress 4. Observation Telescopes Ground-Based Telescopes Space-Based Telescopes Exploration of Space 1 – The Solar System The Solar System - 4.6 billion years old - Planet formation lasted 100s millions years - Four rocky planets (Mercury Venus, Earth and Mars) - Four gas giants (Jupiter, Saturn, Uranus and Neptune) Figure 2-2: Schematics of the Solar System The Solar System - Asteroid belt (meteorites) - Kuiper belt (comets) Figure 2-3: Circular orbits of the planets in the solar system The Sun - Contains mostly hydrogen and helium plasma - Sustained nuclear fusion - Temperatures ~ 15 million K - Elements up to Fe form - Is some 5 billion years old - Will last another 5 billion years Figure 2-4: Photo of the sun showing highly textured plasma, dark sunspots, bright active regions, coronal mass ejections at the surface and the sun’s atmosphere. The Sun - Dynamo effect - Magnetic storms - 11-year cycle - Solar wind (energetic protons) Figure 2-5: Close up of dark spots on the sun surface Probe Sent to Observe the Sun - Distance Sun-Earth = 1 AU - 1 AU = 150 million km - Light from the Sun takes 8 minutes to reach Earth - The solar wind takes 4 days to reach Earth Figure 5-11: Space probe used to monitor the sun Venus - Brightest planet at night - 0.7 AU from the -

Signs of Transport of Chemical Elements and Soil-Forming Processes in Surface Soils at Gale Crater, Mars E.M
47th Lunar and Planetary Science Conference (2016) 2493.pdf SIGNS OF TRANSPORT OF CHEMICAL ELEMENTS AND SOIL-FORMING PROCESSES IN SURFACE SOILS AT GALE CRATER, MARS E.M. Hausrath1, W. Goetz2, A. Cousin3, R.C. Wiens4, P.-Y. Mes- lin3, W. Rapin3 1UNLV, Las Vegas, NV [email protected] 2MPS, Göttingen, Germany 3IRAP, CNRS/UPS, Toulouse, France 4LANL, Los Alamos, NM Introduction: Soils provide an integrated record of martian surface processes. Recorded in soils is in- formation about parent material, the effect of impacts, aeolian and fluvial transport, chemical weathering from both ancient and modern Mars, and addition and loss of material. Analysis of soils can therefore provide important information about the history of Mars. Soil-forming processes in desert soils on Earth are preserved in the chemistry and morphology of those soils. Desert soils often contain desert pavement, an interlocking layer of rocks on the surface of the soil, and a dust-rich layer termed the Av horizon beneath the desert pavement [1]. Desert pavement can indicate age, with a more interlocking pavement indicating greater age [2]. Increasing age also results in a thicker dust-rich layer (Av horizon) beneath the desert pave- ment [2]. This dust-rich layer preserves not only the composition of the deposited aeolian dust, but also evidence of any interactions with liquid water. The Figure 1. NavCam image of the target Soda (indicated dust-rich layer also strongly affects how liquid water with a circle) Image credit: NASA/JPL-Caltech interacts with soils. Soils on Earth, including desert soils, can be stud- ied by analyzing depth profiles such as in soil pits or augered samples. -
Phil Liebrecht Assistant Deputy Associate Administrator and Deputy Program Manager Space Communications and Navigation NASA HQ
Phil Liebrecht Assistant Deputy Associate Administrator and Deputy Program Manager Space Communications and Navigation NASA HQ Meeting the Communications and Navigation Needs of Space missions since 1957 “Keeping the Universe Connected” Public University of Navarra, 2010 [email protected] 1 Operations and Communications Customers 2 Space Operations 101 Relation Between Space Segment, Ground System, and Data Users* Ground System Command Commands Requests Spacecraft and Payload Support • Mission Planning Telemetry • Flight Operations • Flight Dynamics • Perf. Assess., Trending & Archiving Space Data Users • Anomaly Support Segment Data Relay and Level (S/C) Mission Zero Data Processing Mission Data Data • Space-to-ground Comm. • Data Capture • Data Processing • Network Management • Data Distribution • Quick Look * Based on Wertz and Wiley; Space Mission Analysis and Design 3 Communications Theory- Basic Concepts Transmitter and Receiver must use the same language Noise causes interference a) Figures it – no errors (Identify and quantify) b) Figures it – corrects Must be loud enough ENERGY! c) Figures it – incorrectly (message in error) d) Cannot figure- recognizes E L an error T M E XP AIN L E e) Cannot figure- ? TRANSMITTER Distance weakens the sound RECEIVER (calculate the loss) CHANNEL Has to correctly interpret the message - the most difficult job The fundamental problem of communications is that of reproducing at one point either exactly or approximately a message selected at another point. 4 Functional - End to End Process -
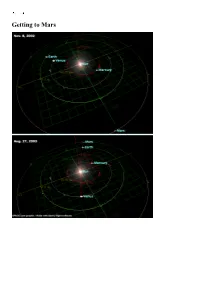
Getting to Mars How Close Is Mars?
Getting to Mars How close is Mars? Exploring Mars 1960-2004 Of 42 probes launched: 9 crashed on launch or failed to leave Earth orbit 4 failed en route to Mars 4 failed to stop at Mars 1 failed on entering Mars orbit 1 orbiter crashed on Mars 6 landers crashed on Mars 3 flyby missions succeeded 9 orbiters succeeded 4 landers succeeded 1 lander en route Score so far: Earthlings 16, Martians 25, 1 in play Mars Express Mars Exploration Rover Mars Exploration Rover Mars Exploration Rover 1: Meridiani (Opportunity) 2: Gusev (Spirit) 3: Isidis (Beagle-2) 4: Mars Polar Lander Launch Window 21: Jun-Jul 2003 Mars Express 2003 Jun 2 In Mars orbit Dec 25 Beagle 2 Lander 2003 Jun 2 Crashed at Isidis Dec 25 Spirit/ Rover A 2003 Jun 10 Landed at Gusev Jan 4 Opportunity/ Rover B 2003 Jul 8 Heading to Meridiani on Sunday Launch Window 1: Oct 1960 1M No. 1 1960 Oct 10 Rocket crashed in Siberia 1M No. 2 1960 Oct 14 Rocket crashed in Kazakhstan Launch Window 2: October-November 1962 2MV-4 No. 1 1962 Oct 24 Rocket blew up in parking orbit during Cuban Missile Crisis 2MV-4 No. 2 "Mars-1" 1962 Nov 1 Lost attitude control - Missed Mars by 200000 km 2MV-3 No. 1 1962 Nov 4 Rocket failed to restart in parking orbit The Mars-1 probe Launch Window 3: November 1964 Mariner 3 1964 Nov 5 Failed after launch, nose cone failed to separate Mariner 4 1964 Nov 28 SUCCESS, flyby in Jul 1965 3MV-4 No.