“Mining” Water Ice on Mars an Assessment of ISRU Options in Support of Future Human Missions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
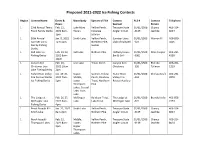
Proposed 2021-2022 Ice Fishing Contests
Proposed 2021-2022 Ice Fishing Contests Region Contest Name Dates & Waterbody Species of Fish Contest ALS # Contact Telephone Hours Sponsor Person 1 23rd Annual Teena Feb. 12, Lake Mary Yellow Perch, Treasure State 01/01/1500 Chancy 406-314- Frank Family Derby 2022 6am- Ronan Kokanee Angler Circuit -3139 Jeschke 8024 1pm Salmon 1 50th Annual Jan. 8, 2022 Smith Lake Yellow Perch, Sunriser Lions 01/01/1500 Warren Illi 406-890- Sunriser Lions 7am-1pm Northern Pike, Club of Kalispell -323 0205 Family Fishing Sucker Derby 1 Bull Lake Ice Feb. 19-20, Bull Lake Nothern Pike Halfway House 01/01/1500 Dave Cooper 406-295- Fishing Derby 2022 6am- Bar & Grill -3061 4358 10pm 1 Canyon Kid Feb. 26, Lion Lake Trout, Perch Canyon Kids 01/01/1500 Rhonda 406-261- Christmas Lion 2022 10am- Christmas -326 Tallman 1219 Lake Fishing Derby 2pm 1 Fisher River Valley Jan. 29-30, Upper, Salmon, Yellow Fisher River 01/01/1500 Chelsea Kraft 406-291- Fire Rescue Winter 2022 7am- Middle, Perch, Rainbow Valley Fire -324 2870 Ice Fishing Derby 5pm Lower Trout, Northern Rescue Auxilary Thompson Pike Lakes, Crystal Lake, Loon Lake 1 The Lodge at Feb. 26-27, McGregor Rainbow Trout, The Lodge at 01/01/1500 Brandy Kiefer 406-858- McGregor Lake 2022 6am- Lake Lake Trout McGregor Lake -322 2253 Fishing Derby 4pm 1 Perch Assault #2- Jan. 22, 2022 Smith Lake Yellow Perch, Treasure State 01/01/1500 Chancy 406-314- Smith Lake 8am-2pm Nothern Pike Angler Circuit -3139 Jeschke 8024 1 Perch Assault- Feb. -

Effects of Ice Formation on Hydrology and Water Quality in the Lower Bradley River, Alaska Implications for Salmon Incubation Habitat
ruses science for a changing world Prepared in cooperation with the Alaska Energy Authority u Effects of Ice Formation on Hydrology and Water Quality in the Lower Bradley River, Alaska Implications for Salmon Incubation Habitat Water-Resources Investigations Report 98-4191 U.S. Department of the Interior U.S. Geological Survey Cover photograph: Ice pedestals at Bradley River near Tidewater transect, February 28, 1995. Effects of Ice Formation on Hydrology and Water Quality in the Lower Bradley River, Alaska Implications for Salmon Incubation Habitat by Ronald L. Rickman U.S. GEOLOGICAL SURVEY Water-Resources Investigations Report 98-4191 Prepared in cooperation with the ALASKA ENERGY AUTHORITY Anchorage, Alaska 1998 U.S. DEPARTMENT OF THE INTERIOR BRUCE BABBITT, Secretary U.S. GEOLOGICAL SURVEY Thomas J. Casadevall, Acting Director Use of trade names in this report is for identification purposes only and does not constitute endorsement by the U.S. Geological Survey. For additional information: Copies of this report may be purchased from: District Chief U.S. Geological Survey U.S. Geological Survey Branch of Information Services 4230 University Drive, Suite 201 Box 25286 Anchorage, AK 99508-4664 Denver, CO 80225-0286 http://www-water-ak.usgs.gov CONTENTS Abstract ................................................................. 1 Introduction ............................................................... 1 Location of Study Area.................................................. 1 Bradley Lake Hydroelectric Project ....................................... -

Design of Low-Altitude Martian Orbits Using Frequency Analysis A
Design of Low-Altitude Martian Orbits using Frequency Analysis A. Noullez, K. Tsiganis To cite this version: A. Noullez, K. Tsiganis. Design of Low-Altitude Martian Orbits using Frequency Analysis. Advances in Space Research, Elsevier, 2021, 67, pp.477-495. 10.1016/j.asr.2020.10.032. hal-03007909 HAL Id: hal-03007909 https://hal.archives-ouvertes.fr/hal-03007909 Submitted on 16 Nov 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Design of Low-Altitude Martian Orbits using Frequency Analysis A. Noulleza,∗, K. Tsiganisb aUniversit´eC^oted'Azur, Observatoire de la C^oted'Azur, CNRS, Laboratoire Lagrange, bd. de l'Observatoire, C.S. 34229, 06304 Nice Cedex 4, France bSection of Astrophysics Astronomy & Mechanics, Department of Physics, Aristotle University of Thessaloniki, GR 541 24 Thessaloniki, Greece Abstract Nearly-circular Frozen Orbits (FOs) around axisymmetric bodies | or, quasi-circular Periodic Orbits (POs) around non-axisymmetric bodies | are of primary concern in the design of low-altitude survey missions. Here, we study very low-altitude orbits (down to 50 km) in a high-degree and order model of the Martian gravity field. We apply Prony's Frequency Analysis (FA) to characterize the time variation of their orbital elements by computing accurate quasi-periodic decompositions of the eccentricity and inclination vectors. -

Performance and Contributions of the Green Industry to Utah's Economy
Utah State University DigitalCommons@USU All Graduate Plan B and other Reports Graduate Studies 5-2021 Performance and Contributions of the Green Industry to Utah's Economy Lara Gale Utah State University Follow this and additional works at: https://digitalcommons.usu.edu/gradreports Part of the Regional Economics Commons Recommended Citation Gale, Lara, "Performance and Contributions of the Green Industry to Utah's Economy" (2021). All Graduate Plan B and other Reports. 1551. https://digitalcommons.usu.edu/gradreports/1551 This Report is brought to you for free and open access by the Graduate Studies at DigitalCommons@USU. It has been accepted for inclusion in All Graduate Plan B and other Reports by an authorized administrator of DigitalCommons@USU. For more information, please contact [email protected]. PERFORMANCE AND CONTRIBUTIONS OF THE GREEN INDUSTRY TO UTAH’S ECONOMY by Lara Gale A research paper submitted in the partial fulfillment of the requirements for the degree of MASTER OF SCIENCE in Applied Economics Approved: ____________________________ ______________________________ Man Keun Kim, Ph.D. Ruby Ward, Ph.D. Major Professor Committee Member ____________________________ Larry Rupp, Ph.D. Committee Member UTAH STATE UNIVERSITY Logan, Utah 2021 ii ABSTRACT PERFORMANCE AND CONTRIBUTIONS OF THE GREEN INDUSTRY TO UTAH’S ECONOMY by Lara Gale, MS in Applied Economics Utah State University, 2021 Major Professor: Dr. Man Keun Kim Department: Applied Economics Landscaping and nursery enterprises, commonly known as green industry enterprises, can be found everywhere in Utah, and are necessary to create both aesthetic appeal and human well-being in the built environment. In order to understand the impact that events such as economic shocks or policy changes may have on the green industry, the baseline performance and contribution of the industry must be specified for comparison following these shocks. -

ROSS T. SHINYAMA #8830-0 SUMMER II. Kaiawtr I+9599-O First L-Lawaiian Center 999 Bishop Street, 23Rd Floor
WATANABI] ING I-LP A Limited Liability [,aw Parrnership ":r : , 1 I ' I J. DOUGLAS ING #1538-0 i.,,i l i t I i '.tì ROSS T. SHINYAMA #8830-0 SUMMER II. KAIAWtr I+9599-O First l-lawaiian Center 999 Bishop Street, 23rd Floor Honolulu, Ilawaii 968 1 3 Telephone No.: (808) 544-8300 Facsimile No.: (808) 544-8399 E-mails : [email protected] Attorneys for TMT INTBRNATIONAL OBSBRVATORY, I,LC BOARD OF LAND AND NATURAL RESOURCES FOR THE STATE OF I]AWAI'I IN THE MATTER OF Case No. BLNR-CC -16-002 TMT INTERNATIONAL A Contested Case l{earing Re Conservation OBSBRVATORY, LLC'S PRE-HEARING District Use Permit (CDUP) I{A-3568 for the STATEMENT; EXHIBIT ..1,'; Thirty Meter Telescope at the Mauna Kea CERTIFICATE OF SERVICE Science Reserve, I(a'ohe Mauka, Hãmakua District, Island of Hawai'i, TMK (3) 4-4- 0l 5:009 TABLtr OF CONTBNTS IN'IRODUC]'ION II DI]SCRIPI'ION OF THE PROJECT AND ITS PROCI]DURAL HISTORY A. Description ofthe Project.................. 3 B. Procedulal Llistory 3 l. General Lease and the MI(SR 3 2. T'he Project 5 III. BURDEN OF PROOF I IV. ISSUES TO BE DECIDED AND TIO'S STATEMENT OF POSI'|iON.. A. The Project, Including the Plans Incorporatcd in the Application, is Consistent with Chapter 183C of the Hawai'i Revised Statutes, the Criteria in HAR $ 13-5- 30(c), and Other Applicable Conservation District Rules......... ..........9 i. The Project is consistent with the purpose of the Conservation District.. 10 2. The Project is consistent with the objectives of the sub2one................... -

A Future Mars Environment for Science and Exploration
Planetary Science Vision 2050 Workshop 2017 (LPI Contrib. No. 1989) 8250.pdf A FUTURE MARS ENVIRONMENT FOR SCIENCE AND EXPLORATION. J. L. Green1, J. Hol- lingsworth2, D. Brain3, V. Airapetian4, A. Glocer4, A. Pulkkinen4, C. Dong5 and R. Bamford6 (1NASA HQ, 2ARC, 3U of Colorado, 4GSFC, 5Princeton University, 6Rutherford Appleton Laboratory) Introduction: Today, Mars is an arid and cold world of existing simulation tools that reproduce the physics with a very thin atmosphere that has significant frozen of the processes that model today’s Martian climate. A and underground water resources. The thin atmosphere series of simulations can be used to assess how best to both prevents liquid water from residing permanently largely stop the solar wind stripping of the Martian on its surface and makes it difficult to land missions atmosphere and allow the atmosphere to come to a new since it is not thick enough to completely facilitate a equilibrium. soft landing. In its past, under the influence of a signif- Models hosted at the Coordinated Community icant greenhouse effect, Mars may have had a signifi- Modeling Center (CCMC) are used to simulate a mag- cant water ocean covering perhaps 30% of the northern netic shield, and an artificial magnetosphere, for Mars hemisphere. When Mars lost its protective magneto- by generating a magnetic dipole field at the Mars L1 sphere, three or more billion years ago, the solar wind Lagrange point within an average solar wind environ- was allowed to directly ravish its atmosphere.[1] The ment. The magnetic field will be increased until the lack of a magnetic field, its relatively small mass, and resulting magnetotail of the artificial magnetosphere its atmospheric photochemistry, all would have con- encompasses the entire planet as shown in Figure 1. -

MARS DURING the PRE-NOACHIAN. J. C. Andrews-Hanna1 and W. B. Bottke2, 1Lunar and Planetary La- Boratory, University of Arizona
Fourth Conference on Early Mars 2017 (LPI Contrib. No. 2014) 3078.pdf MARS DURING THE PRE-NOACHIAN. J. C. Andrews-Hanna1 and W. B. Bottke2, 1Lunar and Planetary La- boratory, University of Arizona, Tucson, AZ 85721, [email protected], 2Southwest Research Institute and NASA’s SSERVI-ISET team, 1050 Walnut St., Suite 300, Boulder, CO 80302. Introduction: The surface geology of Mars appar- ing the pre-Noachian was ~10% of that during the ently dates back to the beginning of the Early Noachi- LHB. Consideration of the sawtooth-shaped exponen- an, at ~4.1 Ga, leaving ~400 Myr of Mars’ earliest tially declining impact fluxes both in the aftermath of evolution effectively unconstrained [1]. However, an planet formation and during the Late Heavy Bom- enduring record of the earlier pre-Noachian conditions bardment [5] suggests that the impact flux during persists in geophysical and mineralogical data. We use much of the pre-Noachian was even lower than indi- geophysical evidence, primarily in the form of the cated above. This bombardment history is consistent preservation of the crustal dichotomy boundary, to- with a late heavy bombardment (LHB) of the inner gether with mineralogical evidence in order to infer the Solar System [6] during which HUIA formed, which prevailing surface conditions during the pre-Noachian. followed the planet formation era impacts during The emerging picture is a pre-Noachian Mars that was which the dichotomy formed. less dynamic than Noachian Mars in terms of impacts, Pre-Noachian Tectonism and Volcanism: The geodynamics, and hydrology. crust within each of the southern highlands and north- Pre-Noachian Impacts: We define the pre- ern lowlands is remarkably uniform in thickness, aside Noachian as the time period bounded by two impacts – from regions in which it has been thickened by volcan- the dichotomy-forming impact and the Hellas-forming ism (e.g., Tharsis, Elysium) or thinned by impacts impact. -

ENVIRONMENTAL RISK ASSESSMENT for GYPSUM TELLS POSITIVE STORY by Karen Bernick
CCPs in Agriculture ENVIRONMENTAL RISK ASSESSMENT FOR GYPSUM TELLS POSITIVE STORY By Karen Bernick mending soils with !ue “…the risk assessment has shown that FGD gypsum gas desulfurization (FGD) contains extremely low concentrations of most trace gypsum o"ers a host of promising bene#ts to elements, about the same as found in mined gypsum agriculture, and this bene#cial use and, in most cases, lower than background soils.” providesA an opportunity for power plants to reduce disposal costs. lead and arsenic trouble spots; and other Chaney says the only risk he has iden- But is it safe? contaminant risks in plant uptake and food. tified occurs if livestock producers He is the lead USDA researcher on the FGD allow ruminants to eat large quanti- $e answer appears to be a resounding gypsum risk assessment. ties of stockpiled gypsum. “If livestock “yes” according to early reports from a producers prevent ruminants from eat- comprehensive risk assessment by the $e USDA-EPA assessment exam- ing gypsum by fencing in stockpiles, U.S. Department of Agriculture (USDA) ines what Chaney calls “new” FGD and limit grazing until after a rainfall to and U.S. Environmental Protection gypsum, a high quality form of syn- wash adhering FGD gypsum from for- Agency (EPA). $e assessment, likely thetic gypsum sought by agricultural age leaves, the sulfate risk is prevented,” to be concluded in 2013, addresses crop producers for its soil improvement he says. potential risks that land applications of bene#ts, calcium and sulfur supplies, FGD gypsum could pose to human health purity and relative low cost versus mined RISK ASSESSMENT or the environment. -

Polar Ice Coring and IGY 1957-58 in This Issue
NEWSLETTER OF T H E N A T I O N A L I C E C O R E L ABORATORY — S CIE N C E M A N AGE M E N T O FFICE Vol. 3 Issue 1 • SPRING 2008 Polar Ice Coring and IGY 1957-58 In this issue . An Interview with Dr. Anthony J. “Tony” Gow Polar Ice Coring and IGY 1957-58 From the early 1950’s through the mid-1960’s, U.S. polar ice coring research was led by two U.S. Army An Interview with Dr. Tony Gow .... 1 Corps of Engineers research labs: the Snow, Ice, and Permafrost Research Establishment (SIPRE), and Upcoming Meetings ...................... 2 later, the Cold Regions Research and Engineering Laboratory (CRREL). One of the high-priority research Greenland Science projects recommended by the U.S. National Academy of Sciences/National Committee for IGY 1957-58 and Education Week ..................... 3 was to deep core drill into polar ice sheets for scientific purposes. To this end, SIPRE was tasked with Ice Core Working Group developing and running the entire U.S. ice core drilling and research program. Following the successful Members ....................................... 3 pre-IGY pilot drilling trials at Site-2 NW Greenland in 1956 (305 m) and 1957 (411 m), the SIPRE WAIS Divide turned their attention to deep ice core drilling in Antarctica for IGY 1957-58. Dr. Anthony J. (Tony) Ice Core Update ............................ 5 Gow (CRREL, retired) was one of the scientists on the project. In March 2008, the NICL-SMO had Ice Cores and POLAR-PALOOZA the opportunity to sit down with Dr. -

Gypsum and Carbon Amendment's
GYPSUM AND CARBON AMENDMENT’S INFLUENCE ON SOIL PROPERTIES, GREENHOUSE GAS EMISSIONS, GROWTH AND NUTRIENT UPTAKE OF RYEGRASS (Lolium perenne) DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Maninder Kaur Walia, M.S. Environment and Natural Resources Graduate Program The Ohio State University 2015 Dissertation Committee: Warren A. Dick, Advisor Rattan Lal Brian K. Slater Frederick C. Michel,Jr. Copyrighted by Maninder Kaur Walia 2015 Abstract Gypsum is a source of calcium and sulfur that improves the physical and chemical properties of the soil. With the benefits associated with gypsum use and the increased availability of synthetic gypsum, its application to soil in Ohio and the Midwest is increasing. Several studies have focused on the effect of gypsum on soil properties. However, little is known about how gypsum affects C stocks in soils. In this study, in addition to gypsum, we also treated the soil with glucose to create a high level of CO2 in the soil profile, and contrasted that with the more slowly released C from plant residues. The overall goal of this dissertation research was to evaluate the effect of plant residues, glucose and gypsum on the growth and nutrient uptake of ryegrass, chemical properties (including total and inorganic C stock) and physical properties of two contrasting soils in Ohio (Wooster silt loam and Hoytville clay loam). Specific objectives of this research were to quantify the effect of (1) gypsum and plant residues on greenhouse gas emissions, (2) gypsum and C amendments on quality of leachate water, (3) gypsum and C amendments addition on C fractions in soils, (4) gypsum, plant residues and glucose addition on soil fertility, growth and nutrients concentrations of ryegrass and (5) gypsum, glucose and plant residues on selected soil physical properties and aggregate-associated C and N. -

Cold-Climate Landforms on Mars
CHAPTER 3 Landforms Indicative of Creep of Debris and Ice Among the large number of landforms related to the creep of ice and debris in periglacial environments on Earth, the most well-known landforms comprise rock glaciers and landforms related to gelifluction processes. While rock glaciers usually form relatively confined but well-distinct landforms, the latter contribute to a large extent to the general slope development in periglacial environments and are less distinct in their appearance. The author focuses here on rock glaciers and related landforms because of their size which allows comparison workwithlandformsonMarsandbecauseoftheirdirectconnectiontoso-calledMartianlobatedebrisaprons which are discussed in subsequent sections. Slope-forming processes in contrast to this, cover a much wider field that is characterized by an abundance of landforms that cannot be attributed to a distinct climatic envi- ronment unambiguously because of their transitional nature (e.g., Selby, 1982). Also, terrestrial slope-forming processes are not necessarily comparable to the Martian environment because of the nature of controlling fac- tors, such as vegetation and precipitation. The subsequent discussion of rock glaciers and related landforms on Earth will not only summarize some of the major scientific aspects but will also try to establish a connection to the Martian environment whenever possible. 3.1. Terrestrial Rock Glaciers 3.1.1. Definitions and Classifications ally frozen debris masses which creep down mountain slopes [...] similar to the behaviour of lava streams". The definition of the term rock glacier has undergone several modifications and is even after more than one Some definitions focus on morphology by saying that century of research and investigations characterized a rock glacier is "anaccumulationofangularrockde- by misinterpretations and forms the basis for many bris, usually with a distinct ridge/furrow pattern and debates in the community (Barsch, 1996). -

Ice Core Science
PAGES International Project Offi ce Sulgeneckstrasse 38 3007 Bern Switzerland Tel: +41 31 312 31 33 Fax: +41 31 312 31 68 [email protected] Text Editing: Leah Christen News Layout: Christoph Kull Hubertus Fischer, Christoph Kull and Circulation: 4000 Thorsten Kiefer, Editors VOL.14, N°1 – APRIL 2006 Ice Core Science Ice cores provide unique high-resolution records of past climate and atmospheric composition. Naturally, the study area of ice core science is biased towards the polar regions but ice cores can also be retrieved from high .pages-igbp.org altitude glaciers. On the satellite picture are those ice cores covered in this issue of PAGES News (Modifi ed image of “The Blue Marble” (http://earthobservatory.nasa.gov) provided by kk+w - digital cartography, Kiel, Germany; Photos by PNRA/EPICA, H. Oerter, V. Lipenkov, J. Freitag, Y. Fujii, P. Ginot) www Contents 2 Announcements - Editorial: The future of ice core research - Dating of ice cores - Inside PAGES - Coastal ice cores - Antarctica - New on the bookshelf - WAIS Divide ice core - Antarctica - Tales from the fi eld - ITASE project - Antarctica - In memory of Nick Shackleton - New Dome Fuji ice core - Antarctica - Vostok ice drilling project - Antarctica 6 Program News - EPICA ice cores - Antarctica - The IPICS Initiative - 425-year precipitation history from Italy - New sea-fl oor drilling equipment - Sea-level changes: Black and Caspian Seas - Relaunch of the PAGES Databoard - Quaternary climate change in Arabia 12 National Page 40 Workshop Reports - Chile - 2nd Southern Deserts Conference - Chile - Climate change and tree rings - Russia 13 Science Highlights - Global climate during MIS 11 - Greece - NGT and PARCA ice cores - Greenland - NorthGRIP ice core - Greenland 44 Last Page - Reconstructions from Alpine ice cores - Calendar - Tropical ice cores from the Andes - PAGES Guest Scientist Program ISSN 1563–0803 The PAGES International Project Offi ce and its publications are supported by the Swiss and US National Science Foundations and NOAA.