Superheater Steam Temperature Control for a 300MW Boiler Unit with Inverse Dynamic Process Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Product Index for Print
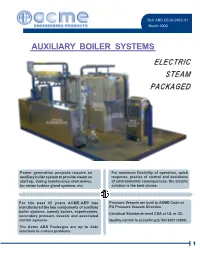
Bull: ABS-CEJS-24SC-01 March 2009 AUXILIARY BOILER SYSTEMS ELECTRICELECTRIC STEAMSTEAM PACKAGEDPACKAGED Power generation projects require an For maximum flexibility of operation, quick auxiliary boiler system to provide steam on response, precise of control and avoidance start-up, during maintenance shut-downs, of environmental consequences, the electric for steam turbine gland systems, etc. solution is the best choice. For the past 45 years ACME-AEP has Pressure Vessels are built to ASME Code or manufactured the key components of auxiliary EU Pressure Vessels Directive. boiler systems, namely boilers, superheaters, Electrical Standards meet CSA or UL or CE. secondary pressure vessels and associated control systems. Quality control is according to ISO 9001 (2000). The Acme ABS Packages are up to date solutions to current problems. 1 Ref: 19-092038 P & I DIAGRAM FOR CEJS HIGH VOLTAGE ELECTRODE BOILER WITH 2 CIRCULATION PUMPS The two diagrams shown are built around the key boiler component availability: CEJS High Voltage Electrode Steam Boiler 24 SC Immersion Element type Boiler Power: 5 MW to 52 MW Power: 600 kW to 3.5 MW Voltages: 6.9 kV to 25 kV, 3 phase, 4 wires Voltages: 380 V, 400 V, 415 V, 480 V, 600 V. 3 phase, 50/60Hz Design Pressure: 150 PSI to 500 PSI Design Pressure: 100 PSI to 600 PSI Operating Pressure: 105 PSI to 450 PSI Operating Pressure: 30 PSI to 540 PSI VERTICAL BOILER HORIZONTAL or VERTICAL BOILER Metal: Carbon steel Metal: Carbon steel or Stainless Steel Heating Elements: Flanged, Incoloy 800 2 Ref: 23-092044 ELECTRIC ELEMENT BOILER - SUPERHEATER PACKAGE PIPING DIAGRAM The two diagrams shown are slightly different but complement each other. -
QUIZ: Boiler System Components
9707 Key West Avenue, Suite 100 Rockville, MD 20850 Phone: 301-740-1421 Fax: 301-990-9771 E-Mail: [email protected] Part of the recertification process is to obtain Continuing Education Units (CEUs). One way to do that is to review a technical article and complete a short quiz. Scoring an 80% or better will grant you 0.5 CEUs. You need 25 CEUs over a 5-year period to be recertified. The quiz and article are posted below. Completed tests can be faxed (301-990-9771) or mailed (9707 Key West Avenue, Suite 100, Rockville, MD 20850) to AWT. Quizzes will be scored within 2 weeks of their receipt and you will be notified of the results. Name: ______________________________________________ Company: ___________________________________________ Address: ____________________________________________ City: ______________________ State: _____ Zip: ________ Phone: ______________________ Fax: __________________ E-mail: _____________________________________________ Boiler Systems – Boiler Components By Irvin J. Cotton, Arthur Freedman Associates, Inc. and Orin Hollander, Holland Technologies, Inc. This is part two of a three-part series on boilers. In part one, the authors discussed boiler design and classification. Part two will discuss boiler components, and part three will describe the various chemistries used in boiler water treatment. Boiler Components The main components in a boiler system are the boiler feedwater heaters, deaerator, boiler, feed pump, economizer, boiler, superheater, attemperator, steam system, condenser and the condensate pump. In addition there are sets of controls to monitor water and steam flow, fuel flow, airflow and chemical treatment additions. Water sample points may exist at a number of places. Most typically the condensate, deaerator outlet, feedwater (often the economizer inlet), boiler, saturated steam and superheated steam will have sample points. -
PATENT SPECIFICATION <N) 1421907
PATENT SPECIFICATION <n) 1421907 (21) Application No. 39315/72 (22) Filed 23 Aug. 1972 (19) O ON (23) Complete Specification filed 13 Aug. 1973 (44) Complete Specification published 21 Jan. 1976 H (51) INT. CL.8 F22G 5/18 F22B 1/06 (52) Index at acceptance H F4A 8C Gil G19 G20 (72) Inventors: ANTHONY RANDLE LUNT and THOMAS DAVID ROBERTS (54) STEAM GENERATING PLANTS (71) We, UNITED KINGDOM ATOMIC superheater 2 for heat exchange with liquid ENERGY AUTHORITY LONDON, a British sodium. The liquid sodium is supplied from a Authority do hereby declare the invention, sodium cooled nuclear reactor which also is 50 for which we pray that a patent may be not shown as it forms no part of the present 5 grantedjjto us, and the method by which it is to invention. Between the steam drum 1 and the be performed, to be particularly described superheater 2 there is an injector 3 which is in and by the following statement:— connected by a branch line 4 to the outlet 5 This invention relates to steam generating of the superheater. The outlet 5 is also con- 55 plants. nected to a turbine stop valve (not shown). 10 In one known construction of steam gen- The branch line includes a control valve 6. erating plant wet steam is separated from the Referring now to Figure 2 the injector 3 liquid phase in a steam drum and the wet comprises a housing 7 having a nozzle 8 and steam is fed to a superheater constructed from a diffuser 9. The nozzle 8 is connected to the 60 stainless steel and through which liquid metal steam drum 1 whilst the diffuser 9 is con- 15 is passed in heat exchange with the steam. -

The Case for the AMERICAN Steam Locomotive
• raIns. AUGUST 1967 • 60, T .. ... ----------------- ' f!,' lIelllelllh~'1' jhis al'jkle ill IIl'cf'lIIh~'1' I!'f;f; TIC,\INS? Xow "'I ('xllel'j ('Ollles THE CASE fOR THE fRENCH STEAM"' LOCOMOTIVE iOl'jh with •.. The case for the AMERICAN steam locomotive 21 Avgus! 1967 - VERNON l. SMITH illVllrolion AUTHOR'S COllECTION OR AS NOTED 1 IN htl ''The Case lor the F~nch trains to be bandied - In America background r($ultcd In fine, ('COnomi- Steam Loc:omoltv(''' in Decem· th~ arc !ugh and harsh. 1::al handhna; of compound engines, her 1966 TRAINS, author R. K. E ... tVl!> (3) MllK:ellancous conditIons - thc Many of the later (our-cylindcI' en_ stated, ", .. The fact ,'emains unques labol' market, the workIng clearances gines have the two r(l8ch I'ods cvn ti oned that nowhere in the world W3$ (loading gau,ge), the maIntenance ncctcd or 11ll1ned togcther to avoid the art of Sl~ locomotivt' design praclLcH, and the 1~'omoIlH: availa ImpI'opcr dIvision of the work by the developed as far and 1.$ clOSt' to per_ bility and utilization required. englneman b<>tween the hil1;h- and ft.oction as In France," MI'. Evans in his arucle Jit>okl> of lov.·-plcssul·c syste.ns, This suggeslS I question the claim put forth by compounding and mamtenance, draw that the labol market may be chonging Mr. Evans, because It 111 not supported bu horsepow(>r, fuel et.'(lnomy, valve Il\ France and that less refined loco by data and performance records gears. improved (ront ends, enlarged mouve dnving is taking place, And It gother(X{ during !.he high Iide of tteam and exhaust pa...sages, riding means that some of the original ('C;'01l- American locomolh,c design qualities and speed, and bOIler blow_ 01111(-'$ ar1! not beint, obtained. -

Numerical Investigation of Superheater Tube Failure
This paper is part of the Proceedings of the 14th International Conference on Simulation and Experiments in Heat Transfer and its Applications (HT 2016) www.witconferences.com Numerical investigation of superheater tube failure H. H. Al-Kayiem & T. M. B. Albarody Mechanical Engineering Department, Universiti Teknologi PETRONAS, Perak, Malaysia Abstract Industrial superheaters in petrochemical plants possess leakages due to failure in many areas. This paper presents the results of investigations into identifying the failure causes. The investigations were carried out by simulating the heating process of a superheater. The simulation was carried out numerically using ANSYS mechanical commercial software. The simulation results indicated that the superheater tubes were subjected to direct radiation heat transfer as well as flame violence. The leakage spots were formed due to cracks in the material mainly at the joint points between the tubes and the header. It was also realized that the welding at the connection areas of the pipes and the header had weakened the material and formed low thermal resistance spots which could not stand the 510°C temperature and consequently, it had either melted or cracked. Keywords: boiler, superheater, thermal wave, thermal fatigue, thermal stress. 1 Introduction The basic failure mechanism, in the piping process, is fatigue due to vibration and/or thermal stresses caused by internal and/or external flows in pipes, junctions, and bends. When high temperature exists in the process, the possibility of thermal fatigue increases the possibilities of piping failure. In the industrial practice, such problem is commonly associated with boilers, risers, and pipes subjected to intermittent internal flow and periodic heat impact from internal or external sources. -

Conventional Steam
DECEMBER 2019 Application Solutions Guide CONVENTIONAL STEAM Experience In Motion 1 Application Solutions Guide — The Global Combined Cycle Landscape TABLE OF CONTENTS THE GLOBAL CONVENTIONAL STEAM POWER FLOWSERVE PRODUCTS IN CONVENTIONAL PLANT LANDSCAPE . 3 STEAM POWER . 16 A Closer Look at Conventional Steam Conventional Steam Applications Power Technology . 5 Overview . 16 Basics . 5 Pumps for Conventional Steam Plants . 18 Plant Configurations and Sizes . 7 Valves for Conventional Steam Plants . 24 Flue Gas Desulfurization (FGD) . 8 Actuators for Conventional Steam Plants . 30 Conventional Steam Project Models . 11 Seals for Conventional Power Plants . 31 Seals for Wet Limestone Flue Gas THE CONVENTIONAL STEAM POWER- Desulfurization . 33 FLOWSERVE INTERFACE . 13 Business Impact and Focus Areas . 13 COMMUNICATING OUR VALUE . 34 The Big Picture . 13 Innovative Ways Flowserve Addresses The Flowserve Fit in Conventional Customer Challenges . 34 Steam Power . 13 APPENDIX . 35 PRODUCTS FOR STEAM POWER — Flowserve Value Proposition in Conventional Steam . 35 AT A GLANCE . 14 Sub-critical Versus Supercritical Pumps . 14 Power Plant . 36 Valves . 14 Reheat . 37 Seals . 14 Terminology . 38 Estimated Values by Plant Size . 15 Acronyms . 39 2 Application Solutions Guide — Conventional Steam THE GLOBAL CONVENTIONAL STEAM POWER PLANT LANDSCAPE Thermal power generation involves the conversion Combined cycle plants have become the preferred of heat energy into electric power. Fossil fuel power technology for gas-fired power generation for several plants as well as nuclear, biomass, geothermal reasons. The USC plant takes 40 to 50 months to and concentrated solar power (CSP) plants are all build; a combined cycle plant can be built in 20 to examples of thermal power generation. -

Watertube Boilers
Watertube Boilers Learning Outcome When you complete this module you will be able to: Describe various watertube boiler designs, including large generating units. Learning Objectives Here is what you will be able to do when you complete each objective: 1. Describe early designs and construction of watertube boilers. 2. Sketch and describe the design and construction of packaged watertube boilers. 3. Describe the design, construction, and components of large scale steam generating units. 1 BLRS 6016 INTRODUCTION The watertube boiler differs from the firetube design in that the tubes contain water rather than combustion gases. In the watertube boiler, the combustion gases travel over the outside surfaces of the tubes and transfer their heat to the water within the tubes. WATERTUBE BOILERS Longitudinal Straight Tube Boilers Fig. 1 illustrates one of the earliest straight tube boilers. The drum runs longitudinally in relation to the tubes. The straight inclined tubes run between vertical headers at the front and rear of the drum; these headers are connected to the drum at their top ends. The combustion gases make three passes across the tubes as indicated by the arrows in Fig. 1. AL_4_0_4.mov A AL4_fig1.gif Figure 1 Straight Tube Design (Longitudinal) The water circulates from the water space of the drum down the rear header, up the inclined tubes (at an angle of 15° to the steam drum), to the front header, and then back up to the drum. 2 BLRS 6016 Figure 2 AL4_fig2.gif Babcock & Wilcox Boiler (1877) The early boiler shown in Fig. 2 had an elaborate setting. -

Superheated Steam in Locomotive Service
I LL INO I S UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN PRODUCTION NOTE University of Illinois at Urbana-Champaign Library Large-scale Digitization Project, 2007. 0 ~0' / ~ ( ~ 1~CC~& '~f~LW "0~ "N ~ ~- ~N~TV N Q SC 2"' C' ''~~C'~ C" 4 AA.A..~ Ay ~4.A A A'-' 'A ' ~ ' ,~A~A 1 A' 'A": "I ~' ~A 9 ~AA >' 0 -A.'-- ~ A" Z 'A A' * A -A "* K~ A. A' ~. 'A A, ,~, 'U",' 4 *, A' '~'" 'A * JA A' 'A' A A K 'A 'A / A A A' 'A vas,^esta>bflibea~ ~ by ^f'A A' A ,rt~7B A 'A on, investigations~ve~Wg~on.~. A' ~ 'i* *t~.,to studysti~dy~ prob1~m~problems A sS ~4 IOAWeto eadA manu-m&i~n- 'be industrial interests 'A' of theb8tat;' -'$a te' The control of tho Engineering ExperintSerment• 'titionSl i•is is'vested vested 'A UNIVERSITY OF ILLINOIS ENGINEERING EXPERIMENT STATION BULLETIN No. 57 APRIL 1912 SUPERHEATED STEAM IN LOCOMOTIVE SERVICE (A REVIEW OF PUBLICATION NO. 127 OF THE CARNEGIE INSTITUTION OF WASHINGTON) BY W. F. M. GOSS DEAN OF THE COLLEGE OF ENGINEERING DIRECTOR OF THE ENGINEERING EXPERIMENT STATION DIRECTOR OF THE SCHOOL OF RAILWAY ENGINEERING AND ADMINISTRATION CONTENTS PAGE I. Introduction-A Summary of Conclusions .......... 3 II. Foreign Practice in the Use of Superheated Steam in Locomotive Service.............. ......... 5 III. Tests to Determine the Value of Superheating in Lo- comotive Service................ .. .. .... 14 IV. Performance of Boiler and Superheater.. ........... 20 V. Performance of the Engine and of the Locomotive as a W hole... ............ .. .. ........ 35 VI. Economy Resulting from the Use of Superheated Steam ........... -

Modeling a Thermal Power Plant Drum-Type Boiler for Control: a Parameter Identification Approach Chin Chen Iowa State University
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 1977 Modeling a thermal power plant drum-type boiler for control: a parameter identification approach Chin Chen Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Oil, Gas, and Energy Commons, and the Systems Engineering Commons Recommended Citation Chen, Chin, "Modeling a thermal power plant drum-type boiler for control: a parameter identification approach " (1977). Retrospective Theses and Dissertations. 7599. https://lib.dr.iastate.edu/rtd/7599 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. INFORMATION TO USERS This material was produced from a microfilm copy of the orignal document. While the most advanced technological means to photograph and reproduce this document have been used, the quality is heavily dependent upon the quality of the original submitted. The following explanation of techniques is provided to help you understand markings or patterns which may appear on this reproduction. 1.The sign or "target" for pages apparency lacking from the document photographed is "Missing Page(s)". If it was possible to obtain the missing page(s) or section, they are spliced into the film along with adjacent pages. This may have necessitated cutting thru an image and duplicating adjacent pages to insure you complete continuity. -

Patented Nov. 9, 1909. 5 SHEETS-SHEET
E, FEIGHTNER SUPERHEATER FOR LOCOMOTIVE BOILERS, APPLICATION FILED MAR, 27, 1909. 939,237. Patented Nov. 9, 1909. 5 SHEETS-SHEET , S N N N N N N N S. I, E, FEIGHTNER, SUPERHEATER FOR LOCOMOTIVE BOILERS, 939,237. APPLICATION FILED MAR. 27, 1909, Patented Nov. 9, 1909. 5 SPEEES-SHEET 2, rare - AEREw. 3. GRAHA c. PT-LRApHERS, WASH:NGT8, 9. L. E. FEIGHTNER, SUPERHEATER FOR LOCOMOTIVE BOILERS, APPLICATION FILED MAR, 27, 1909. Patented Nov, 9, 1909. 5 SHEETS-SBEET 3. ife-as OSDEDAPT R RTRea statees Nassetts SSSR'sIIT saaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa. I I I I I I If ES III 72%22a-2.FIUUUUUI o/eveeczz L. E. FEIGHTNER, SUPERHEATER FOR LOCOMOTIVE BOILERS, APPLICATION FILED MAR, 27, 1909, 939,237. Patented NOW, 9, 1909. 5 SHEETS-SHEET 4. S Ya N 7.A7 2-1se 2.Y 5 Ya. - S. 5 2 QS s 3 ()V Wa S. y s Sn , ; c. ( ra - M - ---1 ; S3v. - l S.A O A Lality N All 3 IN I, E, FEIGHTNER, SUPERHEATER FOR LOCOMOTIVE BOILERS, 939,237. APPLICATION FILED MAR, 27, 1909, Patented NOW, 9, 1909. 5 SBEES-SEET 5. o4-2-242. e éezzo G (72%ze, 42. 9 Cov//evacu- a22-22 a1 6-2-2, 42 UNITED STATES FATENT OFFICE. LEWIS E. FEIGHTNER, OF LIVIA, OHIO, ASSIGNOR TO LIVIA LOCOMOTIVE & MACHINE CoMPANY, OF LIMIA, OHIO, A CORPORATION OF OHIO. SUPERHEATER FOR LOCOMOTIVE-BOILERS. 9:39,23. Specification of Letters Patent. Patented Nov. 9, 1909. Application filed March 27, 1909, Serial No. 486,074, To all whom it may concern. -

Superheater Corrosion in Biomass Boilers
ORNL/TM-2011/399 SUPERHEATER CORROSION IN BIOMASS BOILERS: Today’s Science and Technology September 30, 2010 W. B. A. (Sandy) Sharp SharpConsultant DOCUMENT AVAILABILITY Reports produced after January 1, 1996, are generally available free via the U.S. Department of Energy (DOE) Information Bridge. Web site http://www.osti.gov/bridge Reports produced before January 1, 1996, may be purchased by members of the public from the following source. National Technical Information Service 5285 Port Royal Road Springfield, VA 22161 Telephone 703-605-6000 (1-800-553-6847) TDD 703-487-4639 Fax 703-605-6900 E-mail [email protected] Web site http://www.ntis.gov/support/ordernowabout.htm Reports are available to DOE employees, DOE contractors, Energy Technology Data Exchange (ETDE) representatives, and International Nuclear Information System (INIS) representatives from the following source. Office of Scientific and Technical Information P.O. Box 62 Oak Ridge, TN 37831 Telephone 865-576-8401 Fax 865-576-5728 E-mail [email protected] Web site http://www.osti.gov/contact.html This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise, does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof. -

An Integrated Study of Flue Gas Flow and Superheating Process in Recovery Boiler Using Computational Fluid Dynamics and 1D-Process Modelling
An Integrated Study of Flue Gas Flow and Superheating Process in Recovery Boiler using Computational Fluid Dynamics and 1D-Process Modelling Kunal Kumar Andritz Oy, Viljami Maakala Andritz Oy and Ville Vuorinen Aalto University ABSTRACT Superheaters are the last heat exchangers on the steam side in recovery boilers. They are typically made of expensive materials due to the high steam temperature and risks associated with ash-induced corrosion. Therefore, detailed knowledge about the steam properties and material temperature distribution is essential for improving the energy efficiency, cost efficiency and safety of recovery boilers. In this work, for the first time, a comprehensive 1D-process model (1D-PM) for superheated steam cycle is developed and linked with a full-scale 3D CFD (computational fluid dynamics) model of the superheater region flue gas flow. The results indicate that first; the geometries of headers and superheater platens affect platen-wise steam distribution. Second, the CFD solution of the 3D flue gas flow field and platen heat flux distribution coupled with the 1D-PM affect the generated superheated steam properties and material temperature distribution. These new observations clearly demonstrate the value of the present integrated CFD/1D-PM modelling approach. It is advantageous for trouble shooting, optimizing the performance of superheaters and selecting their design margins for the future. The developed integrated modelling approach could also be relevant for other large-scale energy production units such as biomass-fired boilers. 1 INTRODUCTION Recovery boilers are used to combust black liquor for chemical recovery and producing high-pressure superheated steam. The generated steam is utilized for self-sustainable pulp mill operations and electricity generation.