Fault: a Python Embedded Domain-Specific Language For
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Federation Toolflow
Federation: Open Source SoC Design Methodology Jack Koenig, Staff Engineer Aug 3, 2019 Hardware Trends: Compute Needs are Changing e.g., machine learning But, CPUs are not getting faster! Source: Medium, Entering the world of Machine Learning 2 Hardware Trends: Custom Hardware to the Rescue! Custom Chips But, custom chip development GPUs (e.g., Google TPU) costs are too high! 3 How did turn into a $1B acquisition with only 13 employees?* 4 * https://www.sigarch.org/open-source-hardware-stone-soups-and-not-stone-statues-please Why do silicon projects need experts from at least 14+ disciplines just to get started? 6 <Your Name Here> Tech Stack Tech Stack Readily-Available Reusable Technology from techstacks.io Federation Tools Infrastructure Cloud Services 7 We Should Copy “Innovations” from the Software Industry open-source standards abstraction and code reuse composability and APIs productivity tooling commodity infrastructure 8 npm Enables Modular Web Development with Reusable Packages 9 Source: https://go.tiny.cloud/blog/a-guide-to-npm-the-node-js-package-manager/ npm Enables Javascript as Most Popular Programming Language • 830.000 of packages • 10 million users • 30 billion packages downloads per month • 90% of Web built of NPM packages • NPM used everywhere: client, server, mobile, IoT • Open source libraries availability is the major driving force for Language adoption [Leo2013] proven by NPM • 70+ programming languages can be transpiled into JS, WebAssembly and published on NPM 10 Federation: the action of forming states or organizations into a single group with centralized control, within which smaller divisions have some degree of internal autonomy 11 Federation: a suite of open-source tools that SiFive is using to orchestrate modular SoC design workflows 12 Federation Tools Enable a Modular SoC Design Methodology Federation Tools IP Package 1 IP Package 2 IP Package 3 1. -

Co-Simulation Between Cλash and Traditional Hdls
MASTER THESIS CO-SIMULATION BETWEEN CλASH AND TRADITIONAL HDLS Author: John Verheij Faculty of Electrical Engineering, Mathematics and Computer Science (EEMCS) Computer Architecture for Embedded Systems (CAES) Exam committee: Dr. Ir. C.P.R. Baaij Dr. Ir. J. Kuper Dr. Ir. J.F. Broenink Ir. E. Molenkamp August 19, 2016 Abstract CλaSH is a functional hardware description language (HDL) developed at the CAES group of the University of Twente. CλaSH borrows both the syntax and semantics from the general-purpose functional programming language Haskell, meaning that circuit de- signers can define their circuits with regular Haskell syntax. CλaSH contains a compiler for compiling circuits to traditional hardware description languages, like VHDL, Verilog, and SystemVerilog. Currently, compiling to traditional HDLs is one-way, meaning that CλaSH has no simulation options with the traditional HDLs. Co-simulation could be used to simulate designs which are defined in multiple lan- guages. With co-simulation it should be possible to use CλaSH as a verification language (test-bench) for traditional HDLs. Furthermore, circuits defined in traditional HDLs, can be used and simulated within CλaSH. In this thesis, research is done on the co-simulation of CλaSH and traditional HDLs. Traditional hardware description languages are standardized and include an interface to communicate with foreign languages. This interface can be used to include foreign func- tions, or to make verification and co-simulation possible. Because CλaSH also has possibilities to communicate with foreign languages, through Haskell foreign function interface (FFI), it is possible to set up co-simulation. The Verilog Procedural Interface (VPI), as defined in the IEEE 1364 standard, is used to set-up the communication and to control a Verilog simulator. -

Development of Systemc Modules from HDL for System-On-Chip Applications
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Masters Theses Graduate School 8-2004 Development of SystemC Modules from HDL for System-on-Chip Applications Siddhartha Devalapalli University of Tennessee - Knoxville Follow this and additional works at: https://trace.tennessee.edu/utk_gradthes Part of the Electrical and Computer Engineering Commons Recommended Citation Devalapalli, Siddhartha, "Development of SystemC Modules from HDL for System-on-Chip Applications. " Master's Thesis, University of Tennessee, 2004. https://trace.tennessee.edu/utk_gradthes/2119 This Thesis is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Masters Theses by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a thesis written by Siddhartha Devalapalli entitled "Development of SystemC Modules from HDL for System-on-Chip Applications." I have examined the final electronic copy of this thesis for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Master of Science, with a major in Electrical Engineering. Dr. Donald W. Bouldin, Major Professor We have read this thesis and recommend its acceptance: Dr. Gregory D. Peterson, Dr. Chandra Tan Accepted for the Council: Carolyn R. Hodges Vice Provost and Dean of the Graduate School (Original signatures are on file with official studentecor r ds.) To the Graduate Council: I am submitting herewith a thesis written by Siddhartha Devalapalli entitled "Development of SystemC Modules from HDL for System-on-Chip Applications". -

A Fedora Electronic Lab Presentation
Chitlesh GOORAH Design & Verification Club Bristol 2010 FUDConBrussels 2007 - [email protected] [ Free Electronic Lab ] (formerly Fedora Electronic Lab) An opensource Design and Simulation platform for Micro-Electronics A one-stop linux distribution for hardware design Marketing means for opensource EDA developers (Networking) From SPEC, Model, Frontend Design, Backend, Development boards to embedded software. FUDConBrussels 2007 - [email protected] Electronic Designers Problems Approx. 6 month design development cycle Tackling Design Complexity Lower Power, Lower Cost and Smaller Space Semiconductor Industry's neck squeezed in 2008 Management (digital/analog) IP Portfolio FUDConBrussels 2007 - [email protected] FUDConBrussels 2007 - [email protected] A basic Design Flow FUDConBrussels 2007 - [email protected] TIP: Use verilator to lint your verilog files. Most of the Veripool tools are available under FEL. They are in sync with Wilson Snyder's releases. FUDConBrussels 2007 - [email protected] FUDConBrussels 2007 - [email protected] GTKWaveGTKWave Don'tDon't forgetforget itsits TCLTCL backendbackend WidelyWidely usedused togethertogether withwith SystemCSystemC FUDConBrussels 2007 - [email protected] Tools Standard Cell libraries FUDConBrussels 2007 - [email protected] BackendBackend designdesign Open Circuit Design, Electric FUDConBrussels 2007 - [email protected], Toped gEDA/gafgEDA/gaf Well known and famous. A very good example of opensource -

Simulator for the RV32-Versat Architecture
Simulator for the RV32-Versat Architecture João César Martins Moutoso Ratinho Thesis to obtain the Master of Science Degree in Electrical and Computer Engineering Supervisor(s): Prof. José João Henriques Teixeira de Sousa Examination Committee Chairperson: Prof. Francisco André Corrêa Alegria Supervisor: Prof. José João Henriques Teixeira de Sousa Member of the Committee: Prof. Marcelino Bicho dos Santos November 2019 ii Declaration I declare that this document is an original work of my own authorship and that it fulfills all the require- ments of the Code of Conduct and Good Practices of the Universidade de Lisboa. iii iv Acknowledgments I want to thank my supervisor, Professor Jose´ Teixeira de Sousa, for the opportunity to develop this work and for his guidance and support during that process. His help was fundamental to overcome the multiple obstacles that I faced during this work. I also want to acknowledge Professor Horacio´ Neto for providing a simple Convolutional Neural Net- work application, used as a basis for the application developed for the RV32-Versat architecture. A special acknowledgement goes to my friends, for their continuous support, and Valter,´ that is developing a multi-layer architecture for RV32-Versat. When everything seemed to be doomed he always had a miraculous solution. Finally, I want to express my sincere gratitude to my family for giving me all the support and encour- agement that I needed throughout my years of study and through the process of researching and writing this thesis. They are also part of this work. Thank you. v vi Resumo Esta tese apresenta um novo ambiente de simulac¸ao˜ para a arquitectura RV32-Versat baseado na ferramenta de simulac¸ao˜ Verilator. -

Pyvsc: Systemverilog-Style Constraints and Coverage in Python
PyVSC: SystemVerilog-Style Constraints, and Coverage in Python M. Ballance Milwaukie, OR, USA [email protected] Abstract—Constrained-randomization and functional Coverage is captured as a set of individual coverpoint coverage are key elements in the widely-used SystemVerilog-based instances, and is not organized into covergroup types and verification flow. The use of Python in functional verification is instances in the same way that SystemVerilog does. growing in popularity, but Python has historically lacked support for the constraint and coverage features provided by B. SystemC SystemVerilog. This paper describes PyVSC, a library that SystemC has been one of the longer-lasting languages used provides these features. for modeling and verifying hardware that is built as an embedded domain-specific language within a general-purpose Keywords—functional verification, Python, constrained programming language (C++). While libraries for constraints random, functional coverage and coverage targeting SystemC are not directly applicable in I. INTRODUCTION Python, it’s worthwhile considering approaches taken. Verification flows based on constrained-random stimulus The SystemC Verification Library (SCV) provides basic generation and functional coverage collection have become randomizations and constraints, using a Binary Decision dominant where SystemVerilog is used for the testbench Diagram (BDD) solver. BDD-based constraint solvers are environment. Consequently, verification engineers have known to have performance and capacity challenges, especially significant experience with the constructs and patterns provided with sizable constraint spaces. No support for capturing by SystemVerilog. functional coverage is provided. There is growing interest in making use of Python in The CRAVE [4] library sought to bring higher performance verification environments – either as a complete verification and capacity to randomization in SystemC using Satifiability environment or as an adjunct to a SystemVerilog verification Modulo Theories (SMT) constraint solvers. -

PGAS Communication for Heterogeneous Clusters with Fpgas
PGAS Communication for Heterogeneous Clusters with FPGAs by Varun Sharma A thesis submitted in conformity with the requirements for the degree of Master of Applied Science Graduate Department of Electrical and Computer Engineering University of Toronto © Copyright 2020 by Varun Sharma Abstract PGAS Communication for Heterogeneous Clusters with FPGAs Varun Sharma Master of Applied Science Graduate Department of Electrical and Computer Engineering University of Toronto 2020 This work presents a heterogeneous communication library for generic clusters of processors and FPGAs. This library, Shoal, supports the partitioned global address space (PGAS) memory model for applications. PGAS is a shared memory model for clusters that creates a distinction between local and remote memory accesses. Through Shoal and its common application programming interface for hardware and software, applications can be more freely migrated to the optimal platform and deployed onto dynamic cluster topologies. The library is tested using a thorough suite of microbenchmarks to establish latency and throughput performance. We also show an implementation of the Jacobi method that demonstrates the ease with which applications can be moved between platforms to yield faster run times. ii Acknowledgements It takes a village to raise a child and about as many people to raise a thesis as well. Foremost, I would like to thank my supervisor, Paul Chow, for all that he’s done for me over the course of the four years that I’ve known him thus far. Thank you for accepting me as your student for my undergraduate thesis and not immediately rejecting me when I asked to pursue a Masters under your supervision as well. -
Lastlayer:Towards Hardware and Software Continuous Integration
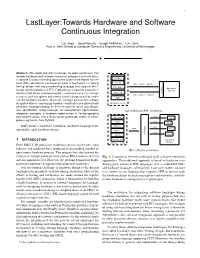
1 LastLayer:Towards Hardware and Software Continuous Integration Luis Vega, Jared Roesch, Joseph McMahan, Luis Ceze. Paul G. Allen School of Computer Science & Engineering, University of Washington F Abstract—This paper presents LastLayer, an open-source tool1 that enables hardware and software continuous integration and simulation. Python Compared to traditional testing approaches based on the register transfer Scala level (RTL) abstraction, LastLayer provides a mechanism for testing RTL input signals Python Verilog designs with any programming language that supports the C RTL DSLs hardware foreign function interface (CFFI). Furthermore, it supports a generic C Scala RTL input signals design Verilog ports interface that allows external programs convenient access to storage RTL DSLs RTL output signals hardware resources such as registers and memories in the design as well as control design VHDL ports over the hardware simulation. Moreover, LastLayer achieves this software Verilog RTL output signals hardware tests integration without requiring any hardware modification and automatically VHDL generates language bindings for these storage resources according to user specification. Using LastLayer, we evaluated two representative hardware tests Python (a) Traditional RTL simulationDPI integration examples: a hardware adder written in Verilog operating reg_a Java DPIDPI over NumPy arrays, and a ReLu vector-accelerator written in Chisel Python reg_amem_a processing tensors from PyTorch. Racket Java DPIDPI CFFI mem_a mem_b Index terms— hardware simulation, hardware language inter- HaskellRacket DPI CFFI DPI mem_b LastLayer reg_b operability, agile hardware design HaskellRust DPI LastLayer reg_b JavaScriptRust hardware design 1 INTRODUCTION softwareJavaScript tests hardware design software tests From RISC-V [9] processors to domain-specific accelerators, both industry and academia have produced an outstanding number of (b) LastLayer simulation open-source hardware projects. -

FPGA-Accelerated Evaluation and Verification of RTL Designs
FPGA-Accelerated Evaluation and Verification of RTL Designs Donggyu Kim Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2019-57 http://www2.eecs.berkeley.edu/Pubs/TechRpts/2019/EECS-2019-57.html May 17, 2019 Copyright © 2019, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. FPGA-Accelerated Evaluation and Verification of RTL Designs by Donggyu Kim A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Computer Science in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Krste Asanovi´c,Chair Adjunct Assistant Professor Jonathan Bachrach Professor Rhonda Righter Spring 2019 FPGA-Accelerated Evaluation and Verification of RTL Designs Copyright c 2019 by Donggyu Kim 1 Abstract FPGA-Accelerated Evaluation and Verification of RTL Designs by Donggyu Kim Doctor of Philosophy in Computer Science University of California, Berkeley Professor Krste Asanovi´c,Chair This thesis presents fast and accurate RTL simulation methodologies for performance, power, and energy evaluation as well as verification and debugging using FPGAs in the hardware/software co-design flow. Cycle-level microarchitectural software simulation is the bottleneck of the hard- ware/software co-design cycle due to its slow speed and the difficulty of simulator validation. -

Static Analysis to Improve RTL Verification
Static Analysis to Improve RTL Verification Akash Agrawal Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the requirements for the degree of Master of Science in Computer Engineering Michael Hsiao, Chair Haibo Zeng A. Lynn Abbott February 16, 2017 Blacksburg, Virginia Keywords: Static Analysis, ATPG, RTL, Reachability Analysis Copyright 2017, Akash Agrawal Static Analysis to Improve RTL Verification Akash Agrawal ABSTRACT Integrated circuits have traveled a long way from being a general purpose microprocessor to an application specific circuit. It has become an integral part of the modern era of technology that we live in. As the applications and their complexities are increasing rapidly every day, so are the sizes of these circuits. With the increase in the design size, the associated testing effort to verify these designs is also increased. The goal of this thesis is to leverage some of the static analysis techniques to reduce the effort of testing and verification at the register transfer level. Studying a design at register transfer level gives exposure to the relational information for the design which is inaccessible at the structural level. In this thesis, we present a way to generate a Data Dependency Graph and a Control Flow Graph out of a register transfer level description of a circuit description. Next, the generated graphs are used to perform relation mining to improve the test generation process in terms of speed, branch coverage and number of test vectors generated. The generated control flow graph gives valuable information about the flow of information through the circuit design. -

Performed the Most Often. in FPGA Design Flow, Functional and Gate
performed the most often. In FPGA design flow, functional and gate-level timing simulation is typically performed when designers suspect that there might be a mismatch between RTL and functional or gate-level timing simulation results, which can lead to an incorrect design. The mismatch can be caused for several reasons discussed in more detail in Tip #59. Note that the nomenclature of simulation types is not consistent. The same name, for instance “gate-level simulation”, can have slightly different meaning in simulation flows of different FPGA vendors. The situation is even more confusing in ASIC simulation flows, which have many more different simulation types, such as transistor-level, and dynamic simulation. The following figure shows simulation types designers can perform during Xilinx FPGA synthesis and physical implementation process. Figure 1: Simulation types Xilinx FPGA designers can perform simulation after each level of design transformation from the original RTL to the bitstream. The following example is a 12-bit OR gate implemented in Verilog. module sim_types(input [11:0] user_in, output user_out); assign user_out = |user_in; endmodule XST post-synthesis simulation model is implemented using LUT6 and LUT2 primitives, which are parts of Xilinx UNISIMS RTL simulation library. wire out, out1_14; LUT6 #( .INIT ( 64'hFFFFFFFFFFFFFFFE )) out1 ( .I0(user_in[3]), .I1(user_in[2]), .I2(user_in[5]), .I3(user_in[4]), .I4(user_in[7]), .I5(user_in[6]), .O(out)); LUT6 #( .INIT ( 64'hFFFFFFFFFFFFFFFE )) out2 ( .I0(user_in[9]), .I1(user_in[8]), .I2(user_in[11]), .I3(user_in[10]), .I4(user_in[1]), .I5(user_in[0]), .O(out1_14)); LUT2 #( .INIT ( 4'hE )) out3 ( .I0(out), .I1(out1_14), .O(user_out) ); Post-synthesis simulation model can be generated using the following command: $ netgen -w -ofmt verilog -sim sim.ngc post_synthesis.v Post-translate simulation model is implemented using X_LUT6 and X_LUT2 primitives, which are parts of Xilinx SIMPRIMS simulation library. -
RTL Design and Implementation of a Framebuffer for a RISC-V Processor
Universitat Politècnica de Catalunya (UPC) BarcelonaTech Facultat d’Informàtica de Barcelona (FIB) RTL design and implementation of a framebuffer for a RISC-V processor Educational Cooperative Agreement with Barcelona Supercomputing Centre (BSC) Computer Engineering Degree Final Project Author: Narcís Rodas Quiroga Supervisor: Miquel Moretó (Computer Architecture Department DAC) Co-supervisor: Guillem Cabo Specialization: Computer Engineering Date of oral defense: 28th of October 2020 Abstract The RISC-V instruction set architecture (ISA) and the foundation that supports it continue to grow rapidly as an open-source alternative for hardware designs. Despite open-source software already being established as an important part of all the software solutions, open-source hardware has only recently begun to expand. Before that, the market was entirely made of proprietary ISAs (mostly from the US) that controlled it. This Final Degree Thesis shows the design, implementation and testing of a VGA (Video Graphics Array) framebuffer for the RISC-V processor being developed in the DRAC project by the Barcelona Supercomputing Centre. This document explains the various steps taken along the way and the reasoning behind the decisions that were taken. Keywords: RISC-V, VGA, RTL, Verilog, Framebuffer, AXI. Resumen El conjunto de instrucciones o ISA (del inglés instruction set architecture) RISC-V y la fundación que lo respalda siguen creciendo rápidamente como una alternativa open-source para los diseños hardware. Aunque el software open-source ya representa una parte importante de todas las soluciones software, el hardware open-source todavía está empezando a expandirse. Antes de esto, el mercado estaba compuesto íntegramente de ISAs propietarias (la gran mayoría provenientes de los E.E.