Species Life-Cycle Analysis Modules Paul Mcelhany (Project Manager
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Assessment of Forest Pests and Diseases in Protected Areas of Georgia Final Report
Assessment of Forest Pests and Diseases in Protected Areas of Georgia Final report Dr. Iryna Matsiakh Tbilisi 2014 This publication has been produced with the assistance of the European Union. The content, findings, interpretations, and conclusions of this publication are the sole responsibility of the FLEG II (ENPI East) Programme Team (www.enpi-fleg.org) and can in no way be taken to reflect the views of the European Union. The views expressed do not necessarily reflect those of the Implementing Organizations. CONTENTS LIST OF TABLES AND FIGURES ............................................................................................................................. 3 ABBREVIATIONS AND ACRONYMS ...................................................................................................................... 6 EXECUTIVE SUMMARY .............................................................................................................................................. 7 Background information ...................................................................................................................................... 7 Literature review ...................................................................................................................................................... 7 Methodology ................................................................................................................................................................. 8 Results and Discussion .......................................................................................................................................... -
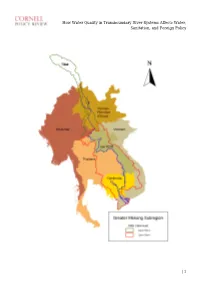
How Water Quality in Transboundary River Systems Affects Water, Sanitation, and Foreign Policy
How Water Quality in Transboundary River Systems Affects Water, Sanitation, and Foreign Policy | 1 How Water Quality in Transboundary River Systems Affects Water, Sanitation, and Foreign Policy David Tipping, 2001 By David C. Tipping Edited by Yeareen Yun Disclaimer: The views and opinions expressed in this article are those of the author and do not necessarily reflect the official policy or position of any agency of the Australian government. Assumptions made within the analysis are not reflective of the position of any Australian government entity, or other organization or professional association. 1. INTRODUCTION Access to adequate water supply and sanitation is the core premise of local level water security. Effective management of transboundary river basin systems and water quality risks is therefore fundamental to social progress and quality of life. Improved water quality management benefits many individual lives in riparian nations, and, as demonstrated by the annual new year blessing of the fish migrations, society at large throughout the Mekong River Basin. In 2001, the author investigated the use of sustainable development indicators to improve the institutional effectiveness of international environmental management regimes. A new framework was designed to evaluate beneficial uses of water. In addition, a case study was developed on the Lower Mekong River Basin system, which integrated measures of water and environmental quality and socio-economic development. The research objectives were: (1) improving the understanding of water quality issues; (2) benchmarking water resources management performance at local, national and regional levels; and (3) enhancing technical and administrative capabilities of transboundary river basin management regimes through capacity development focused on the achievement of sustainable development objectives, and obligations and duties under international law. -
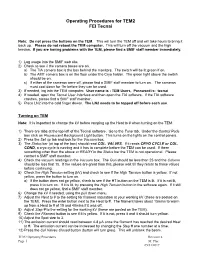
Operating Procedures for TEM2 FEI Tecnai
Operating Procedures for TEM2 FEI Tecnai Note: Do not press the buttons on the TEM. This will turn the TEM off and will take hours to bring it back up. Please do not reboot the TEM computer. This will turn off the vacuum and the high tension. If you are having problems with the TEM, please find a SMIF staff member immediately. 1) Log usage into the SMIF web site. 2) Check to see if the camera boxes are on. a) The TIA camera box is the box behind the monitors. The switch will be lit green if on. b) The AMT camera box is on the floor under the Cryo holder. The green light above the switch should be on. c) If either of the cameras were off, please find a SMIF staff member to turn on. The cameras must cool down for 1hr before they can be used. 3) If needed, log into the TEM computer. User name is : TEM Users, Password is: tecnai 4) If needed, open the Tecnai User Interface and then open the TIA software. If the TIA software crashes, please find a SMIF staff member. 5) Place LN2 into the cold finger dewar. The LN2 needs to be topped off before each use. Turning on TEM Note: It is important to change the kV before ramping up the Heat to # when turning on the TEM. 1) There are tabs at the top left of the Tecnai software. Go to the Tune tab. Under the Control Pads box click on Fluorescent Background Light button. This turns on the lights on the control panels. -

Assessment of Forest Pests and Diseases in Native Boxwood Forests of Georgia Final Report
Assessment of Forest Pests and Diseases in Native Boxwood Forests of Georgia Final report Dr. Iryna Matsiakh Forestry Department, Ukrainian National Forestry University (Lviv) Tbilisi 2016 TABLE OF CONTENT LIST OF TABLES AND FIGURES .................................................................................................................................. 2 ABBREVIATIONS AND ACRONYMS ........................................................................................................................... 5 EXECUTIVE SUMMARY .................................................................................................................................................. 6 INTRODUCTION .............................................................................................................................................................. 10 1. BACKGROUND INFORMATION ............................................................................................................................ 11 1.1. Biodiversity of Georgia ........................................................................................................................................ 11 1.2. Forest Ecosystems .................................................................................................................................................. 12 1.3. Boxwood Forests in Forests Habitat Classification ................................................................................. 14 1.4. Georgian Forests Habitat in the Context of Climate Change -

Guide 3 – Fish Farmer's Guide to Combating Parasitic
GUIDE 3 – FISH FARMER’S GUIDE TO COMBATING PARASITIC INFECTIONS IN COMMON CARP AQUACULTURE e-NIPO: 833-20-103-X A Series of ParaFishControl Guides to Combating Fish Parasite Infections in Aquaculture. Guide 3 This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 634429 (ParaFishControl). This output reflects only the author’s view and the European Union cannot be held responsible for any use that may be made of the information contained therein. Wherever the fish are, that's where we go. “ Richard Wagner “ Common carp is the third most cultivated freshwater species in the world. Carp aquaculture is usually performed in a semi-intensive manner, in earthen ponds, where parasitic diseases can easily compromise fish health, especially in the hot summer months, leading to production and economic losses. This guide provides useful information about the biological background of five parasites, their diagnostics and control measures. © A.S. Holzer List of Authors Dr Astrid S. Holzer, Principal Investigator and Team Leader Institute of Parasitology Biology Centre of the Czech Academy of Sciences, Czech Republic Email: [email protected] Dr Pavla Bartošová-Sojková, Researcher Institute of Parasitology Biology Centre of the Czech Academy of Sciences, Czech Republic Email: [email protected] Honorary Prof. Csaba Székely, Scientific Advisor and Team Leader Institute for Veterinary Medical Research, Centre for Agricultural Research, (former Hungarian Academy of Sciences), Hungary Email: [email protected] Dr Gábor Cech, Senior Researcher, Institute for Veterinary Medical Research, Centre for Agricultural Research, (former Hungarian Academy of Sciences), Hungary Email: [email protected] Dr Kálmán Molnár, Retired Scientific Advisor, Fish Pathology and Parasitology Research Team, Institute for Veterinary Medical Research, Centre for Agricultural Research (former Hungarian Academy of Sciences), Hungary Prof. -
Software User Guide
Cycle Host User's Guide This guide is an evolving document. If you find sections that are unclear, or missing information, please let us know ([email protected]). Please check our website (www.wetlabs.com) periodically for updates. WET Labs, Inc. PO Box 518 Philomath, OR 97370 541-929-5650 fax: 541-929-5277 www.wetlabs.com 28 January 2010 Cycle Host User's Guide Revision 1.04 1/59 Cycle Host Installation The following sub-sections detail the steps necessary to install and run the Cycle Host program (also referred to as "the host") for the first time on a new computer. System Requirements Below are the recommended minimum requirements for a computer to be used to run the host program. Although Windows is currently the only supported operating system, future releases are planned to support Linux and MAC OS as well. Please let us know of your interest in these platforms via [email protected]. Feature Requirements Operating System Windows XP/Vista/2000/2003 (32 and 64 bit versions) Memory 128 Megabytes Disk Space 125 Megabytes (excludes data file storage) Data Port Serial port or USB to Serial adapter supporting 19200 baud Input Devices Keyboard (minimum) Mouse or other pointing device (recommended) Monitor Color, 1024 x 768 (minimum recommended) Table 1: Host Computer System Requirements The Java Runtime Environment The Cycle Host program is written in the JavaTM language developed by Sun Microsystems Inc. For this reason, execution of the host requires the installation of the Java Runtime Environment, or JRE. At the time of this release the current JRE is Version 6 Update 16. -
User Guide 8.2.4
User Guide 8.2.4 Copyright Manual Copyright © 2000-2017 AB Software Consulting Ltd. All rights reserved. AB Software Consulting Ltd. reserves the right to revise this document and to make changes from time to time in the content hereof without obligation to notify any person or persons of such revisions or changes. The software described in this document is supplied under a licence agreement and is protected by UK and international copyright laws. Any implied warranties including any warranties of merchantability or fitness for a particular purpose are limited to the terms of the express warranties set out in the licence agreement. Software Copyright © 2000-2017 AB Software Consulting Ltd. All rights reserved. Trademarks AB Tutor is the registered trademark of AB Software Consulting Ltd. Windows, Windows 7/8/10/2003/2008/2012 are trademarks of Microsoft Corporation. Other products, trademarks or registered trademarks are the property of their respective owners. Contents Using AB Tutor Introduction The AB Tutor interface What is AB Tutor? The list view Basic ABT setup The thumbnail view Advanced setup options Commands Introduction to passwords Power commands Startup passwords Connecting to clients Connection password Screen sharing Startup switches Chat (text and audio) Installation Screen Capture Installation on Windows File transfers Installation on Mac OS Key Sequences Installation on iPad Admin commands Activating AB Tutor Launch Push out updates Policies Uninstallation Block printer Remote Deployment Utility Block external drive Site -

Difference Between Haplontic and Diplontic Life Cycles
Difference Between Haplontic and Diplontic Life Cycles www.differencebetween.com Key Difference – Haplontic vs Diplontic Life Cycles In the context of biology, a biological life cycle is a sequence of changes a particular organism undergoes through means of reproduction (sexual or asexual) which finally returns to the original starting phase. This procedure differs from one organism to the other. During sexual reproduction, the life cycle includes the change of ploidy; the alternation of haploid (n) and diploid (2n) stages. Meiosis occurs during the change over from a diploid stage to a haploid stage. With regards to change of ploidy, life cycles are of three types. They are, haplontic, diplontic and haplodiplontic. In a haplontic life cycle, the haploid stage is typically multicellular and results in the formation of a diploid (2n) cell, which is a zygote. The zygote undergoes meiosis, which results in the formation of haploid (n) cells. In a diplontic life cycle, the diploid stage is typically multicellular, and meiosis occurs during gamete formation which results in the production of haploid (n) gametes. During fertilization, the haploid (n) gametes fuse together in the formation of a diploid (2n) zygote, and it mitotically divides and produces a multicellular diploid (2n) organism. This is the key difference between haplontic and diplontic life cycles. What is a Haplontic Life Cycle? Haplontic life cycle involves the formation of a haploid (n) single cell by the meiosis of a diploid (2n) zygote. This phenomenon could be explained with sporic meiosis – the process of formation of spores. In this process, the zygote mitotically divides and produces multicellular sporophyte which is diploid (2n). -

Angel® Concentrated Platelet Rich Plasma (Cprp) System - Operator’S Manual
Angel® Concentrated Platelet Rich Plasma (cPRP) System - Operator’s Manual Software Version 1.20 DFU-0263-5 Revision 0 05/2020 This page intentionally left blank Table of Contents Before You Get Started Introduction .............................................................................................................................................. vii Indications for Use ................................................................................................................................... vii Contraindications for Use ......................................................................................................................... vii Warnings .................................................................................................................................................. vii Precautions ............................................................................................................................................... x Additional Information .............................................................................................................................. xii Symbols .................................................................................................................................................. xiii Requirements for the disposal of waste electrical and electronic equipment (WEEE) ........................... xiv Service Information ................................................................................................................................ -

FINAL COMPASS Aquaculture Roundtable Brief
Science in Action: Exploring the Future of U.S. Aquaculture A COMPASS Roundtable on Ocean Aquaculture As the population continues to expand—both domestically and globally—identifying secure, safe sources of protein is a critical need. With two-thirds of the planet covered in water, it is logical to turn to the ocean as an arena for producing food. Globally, aquaculture is the fastest growing food sector,[i] underscoring the importance of understanding the scientific, policy, and social implications of ocean aquaculture. As with all types of cultivated food production, there are complex and interwoven challenges and opportunities in ocean aquaculture.[ii] Indigenous knowledge and current research can answer questions around environmental safeguards, ecological impacts, long-term sustainable use of marine resources, and the social dimensions of ocean aquaculture. While we’ve developed a deeper scientific understanding of aquaculture, there remains a gap between the state of the science, federal policy, and public perceptions of ocean aquaculture in the U.S.[iii] In order to help provide research insights on the science related to aquaculture, COMPASS convened a roundtable discussion with scientists and policymakers in July 2019. The Roundtable examined ways that science can inform safe, sustainable, and socially acceptable ocean aquaculture in the United States. In preparation, COMPASS staff examined the U.S. aquaculture landscape by speaking with more than 50 scientists, managers, policymakers, and tribal representatives. These stage-setting conversations reflected the key concerns surrounding ocean aquaculture such as best management practices, economics, pollution, interactions with wild populations, and climate change. They also highlighted some of the scientific, technological, and cultural advancements in contemporary aquaculture that could address and reduce some of the perceived risks. -
User Manual ( Wins Version 5.26.99 )
Wins Scoring System User Manual ( Wins version 5.26.99 ) Srl STELTRONIC via Artigianale 34 • 25082 Botticino Sera (BS) – ITALY Tel. +39 030 2190811 • Fax + 39 030 2190798 http://www.steltronic.com STELTRONIC S.r.l. via Artigianale Botticino Sera (BS) ITALY - User manual [Wins ver 5.26] 2 Tel. +39 030 2190811 Fax +39 030 2190798 http://www.steltronic.com Thank you for choosing Steltronic. This user manual has been written for Wins version 5.26.99, it is also available in pdf format so that it can installed onto a computer. In order to make it easy to consult, the manual has been divided into chapters each covering different subjects: GENERAL Brief Hardware and Scoring System Architecture description. ------------------------------------------------------------------------------------------------------------------------------------ INITIAL USE OF WINDOWS, TURNING THE SYSTEM ON AND OFF Fast guide for ‘first time users’ of the PC and computer system. ------------------------------------------------------------------------------------------------------------------------ SETUP OF THE WINS PROGRAM Contains all the information relative to the program settings from selecting time zones to changing animations. ------------------------------------------------------------------------------------------------------------------------ USING THE SYSTEMS FUCTIONS Description of how to use the lane rental, time game, bar and other programs. ------------------------------------------------------------------------------------------------------------------------ -

Visual Language Features Supporting Human-Human and Human-Computer Communication
Visual Language Features Supporting Human-Human and Human-Computer Communication Jason E. Robbins1, David J. Morley2, David F. Redmiles1, Vadim Filatov3, Dima Kononov3 1 University of California, Irvine 2 Rockwell International 3RR-Gateway, AO Abstract relationships and then try to model them as closely as pos- sible while abstracting details that distract attention from Fundamental to the design of visual languages are the our main concerns. goals of facilitating communication between people and Currently, OBPE exists as a research prototype serving computers, and between people and other people. The to explore the concepts and features that are needed to Object Block Programming Environment (OBPE) is a visual design, programming, and simulation tool which allow effective visual programming in our domain. OBPE emphasizes support for both human-human and human- programs are composed of object blocks, ports, and arcs. computer communication. OBPE provides several features Object blocks use ports as their interface points to the rest to support effective communication: (1) multiple, of the system. Arcs are message passageways between coordinated views and aspects, (2) customizable graphics, ports. Object blocks (or simply, blocks) are visual abstract (3) the “machines with push-buttons” metaphor, and (4) data types [1] which encapsulate state, behavior, visualiza- the host/transient pattern. OBPE uses a diagram-based, tion of state and behavior, and user interface event process- visual object-oriented language that is intended for quickly ing. Furthermore, blocks are first class objects because they designing and programming visual simulations of are instances of normal Smalltalk classes.1 factories. Users interact with OBPE through browsers that allow direct manipulation of blocks and visualization of their 1.