Guidelines to Engine Dynamics and Vibration
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mean Value Modelling of a Poppet Valve EGR-System
Mean value modelling of a poppet valve EGR-system Master’s thesis performed in Vehicular Systems by Claes Ericson Reg nr: LiTH-ISY-EX-3543-2004 14th June 2004 Mean value modelling of a poppet valve EGR-system Master’s thesis performed in Vehicular Systems, Dept. of Electrical Engineering at Linkopings¨ universitet by Claes Ericson Reg nr: LiTH-ISY-EX-3543-2004 Supervisor: Jesper Ritzen,´ M.Sc. Scania CV AB Mattias Nyberg, Ph.D. Scania CV AB Johan Wahlstrom,¨ M.Sc. Linkopings¨ universitet Examiner: Associate Professor Lars Eriksson Linkopings¨ universitet Linkoping,¨ 14th June 2004 Avdelning, Institution Datum Division, Department Date Vehicular Systems, Dept. of Electrical Engineering 14th June 2004 581 83 Linkoping¨ Sprak˚ Rapporttyp ISBN Language Report category — ¤ Svenska/Swedish ¤ Licentiatavhandling ISRN ¤ Engelska/English ££ ¤ Examensarbete LITH-ISY-EX-3543-2004 ¤ C-uppsats Serietitel och serienummer ISSN ¤ D-uppsats Title of series, numbering — ¤ ¤ Ovrig¨ rapport ¤ URL for¨ elektronisk version http://www.vehicular.isy.liu.se http://www.ep.liu.se/exjobb/isy/2004/3543/ Titel Medelvardesmodellering¨ av EGR-system med tallriksventil Title Mean value modelling of a poppet valve EGR-system Forfattare¨ Claes Ericson Author Sammanfattning Abstract Because of new emission and on board diagnostics legislations, heavy truck manufacturers are facing new challenges when it comes to improving the en- gines and the control software. Accurate and real time executable engine models are essential in this work. One successful way of lowering the NOx emissions is to use Exhaust Gas Recirculation (EGR). The objective of this thesis is to create a mean value model for Scania’s next generation EGR system consisting of a poppet valve and a two stage cooler. -

Engine Block Materials and Its Production Processes
ENGINE BLOCK MATERIALS AND ITS PRODUCTION PROCESSES 2.2 THE CAST IRON MONOLITHIC BLOCK The widespread use of cast iron monolithic block is as a result of its low cost and its formidability. This type of block normally comes as the integral type where the engine cylinder and the upper crankcase are joined together as one. The iron used for this block is the gray cast iron having a pearlite-microstructure. The iron is called gray cast iron because its fracture has a gray appearance. Ferrite in the microstructure of the bore wall should be avoided because too much soft ferrite tends to cause scratching, thus increasing blow-by. The production of cast iron blocks using a steel die is rear because its lifecycle is shortened as a result of the repeated heat cycles caused by the molten iron. Sand casting is the method widely used in the production of cast iron blocks. This involves making the mould for the cast iron block with sand. The preparation of sand and the bonding are a critical and very often rate-controlling step. Permanent patterns are used to make sand molds. Usually, an automated molding machine installs the patterns and prepares many molds in the same shape. Molten metal is poured immediately into the mold, giving this process very high productivity. After solidification, the mold is destroyed and the inner sand is shaken out of the block. The sand is then reusable. The bonding of sand is done using two main methods: (i) the green sand mold and (ii) the dry sand mold. -

Section 02 - Block Basics
Block Basics – Section 2 Section 02 - Block Basics 2.0 Small Block 330 & 350 Block Key Differences. The key differences between the 330 and 350 are the 350’s larger bore and the Generation 1 Cast Iron Small Block V-8 Facts 330’s forged crank. General. In 1964 Olds replaced their small block 215 V8 with 1964 – 1966 Valve Lifter Angle. All 1964–1966 blocks used a a cast iron block of completely new design. The 330 V-8 different valve lifter angle of attack on the cam (45). Thus shared none of its engine block architecture with that of the 1964–1966 330 blocks CANNOT USE 1967 AND LATER 215 V-8 and the 225 V-6 sourced from Buick. The engine CAMS. All 1964–1966 cams WILL NOT WORK in 1967 and was no longer aluminum, but cast iron, as weight became later blocks. Later blocks used a 39 lifter angle. Blocks with less of a factor with the engine going into both the larger a “1” or “1A” cast up near the oil filler tube used the 45 lifter mid-sized F-85s, Cutlasses and the full-size Jetstars angle and should be avoided, if possible. introduced in that year. The engine was designed as a replacement for the 215, but was cast iron and enlarged in Early 330 Rocker Arms. The first run of 330 blocks was anticipation of the growth in size of the mid-size cars, where equipped with rocker arms similar to the previous 394 block it was to be primarily used and as the workhorse for the that traces its heritage back to 1949. -

Mike Mavrigian Special Firing Order Camshafts Allow the Performance
Performance Perspectives Special firing order camshafts allow the performance engine builder to create a smoother-running engine, with improved fuel distribution and enhanced crankshaft and main bearing durability. his article falls under the category for the same reasons...to smooth out the harmon- of “thinking outside the box.” It’s a ics in the pursuit of greater engine durability and trite phrase, I know, but the point to potentially generate more power. is that we don’t need to always Power gain potential aside, the primary reason think of an OE carmaker’s engine to address (and alter) cylinder firing order is to Mike firing order specification as gospel. achieve a smoother-running engine (a smoother, Mavrigian In certain racing applications, a special firing or- more lineal acceleration ramp), with less harmonic Tder (SFO) camshaft can be used as a tuning aid, effect (and crank deflection) on the crankshaft and [email protected] allowing the competition engine builder to fur- its main bearings. In theory, virtually all engines can ther address combustion heat and crankshaft dis- benefit from this. The engines that can most bene- turbance (harmonic) issues. fit include those that run at or near peak rpm levels In essence, the goal in changing the firing or- for long periods of time, such as oval track, road der is to create a smoother-running engine and race and marine engine applications, as well as en- more even fuel distribution, with enhanced gines that are called upon to produce maximum crankshaft and main bearing durability. In the power in a very short period of time (drag race). -

MX-13 MX-13 Coach & Bus Engine Coach & Bus Engine
MX-13 MX-13 Coach & Bus engine Coach & Bus engine DAF Components Hugo van der Goeslaan 1 P.O Box 90065 5600PT Eindhoven The Netherlands www.dafcomponents.com [email protected] Tel. +31 (0)40 21 43 293 ISO14001 ISO/TS16949 Environmental Quality Management System Management System No rights can be derived from this publication. DAF Trucks N.V. reserves the right to change product specifi - cations without prior notice. Products and services comply with the Global Directives effective at the time of sale but may vary depending on the country in which you are located. For the most recent information, contact DW143203/0919 DAF Components. A PACCAR COMPANY DRIVEN BY QUALITY DAF COMPONENTS MX-13 Coach & Bus engine The 12.9 Litre PACCAR MX-13 engine uses state of the A well-controlled and further optimized combustion MX-13 ENGINE art technologies, fi rst class materials, extensive function process using smart dosing controls and modulating fuel No. of cylinders and cylinder arrangement 6 in line, vertical integration and a heavy duty foamed wire loom to achieve line pressure assures highest effi ciency and lowest fuel Valves 4 highest reliability and durability. Excellent torque at low consumption ever. Repair & Maintenance costs have been Bore x Stroke [mm] 130 x 162 engine speeds and a high performance is available over a cut as well by extending intervals and increased uptime. Piston displacement [dm3] 12.9 wide rev. range. The best engine has become even better. Compression ratio 18,5 : 1 The engine is available in Euro 6, Euro 5 and Euro 3 Aspiration Turbocharged with charge cooling versions. -

United States Patent (19) 11 Patent Number: 5,950,587 Sattler Et Al
USOO5950587A United States Patent (19) 11 Patent Number: 5,950,587 Sattler et al. (45) Date of Patent: Sep. 14, 1999 54 CONTINUOUSLY WARIABLE RUNNER 2682431-A1 4/1993 France. LENGTH MANIFOLD 3825000 A1 2/1989 Germany .......................... 123/184.55 60-224923 11/1985 Japan .................... ... 123/184.55 75 Inventors: Eric R. Sattler, Trenton; Joel S. 2239899 7/1991 United Kingdom ...... ... 123/184.55 Myers, Southgate; Michael J. Haspel, Westland, all of Mich. Primary Examiner Erick R. Solis 73 Assignee: BASF Corporation, Mount Olive, N.J. ASSistant Examiner Brian Hairston Attorney, Agent, or Firm-Ryan W. Massey; James J. Drake 22 Filed: Jul. 22, 1998 A continuously variable runner length manifold is provided (51) Int. Cl. ................................................ FO2B 27/06 for an internal combustion engine. The continuously vari 52 U.S. Cl. .................. 123/184.55; 123/18453 able runner length manifold includes a housing having an 58 Field of Search ........................... 123/184.55, 18453 inlet port and a plurality of outlet ports defined by a plurality of Stacked manifold Sections. A plurality of runner members 56) References Cited are rotatably mounted within the housing. The runner mem bers include wall portions which combine with the housing U.S. PATENT DOCUMENTS to define a plurality of runners in communication with a 4,619,226 10/1986 Ueda et al. ........................ 123s2 MB plenum and a respective one of the outlet ports. The runners 4,699,630 10/1987 Lee et al. ............................... 48/1801 have a length which is continuously variable upon rotation of the runner members relative to the housing. FOREIGN PATENT DOCUMENTS 237755 A2 9/1987 European Pat. -

Performance Camshafts
PERFORMANCE CAMSHAFTS Street or strip, Engine Pro Performance Camshafts simply out perform the competition. Our manufacturing accuracy promotes improved valve train stability resulting in improved power gain. Our “controlled ramp” lobe profiles offer acceleration rates extending valve train life while delivering maximum horsepower. • Ground in the U.S.A. 100% American Made Castings and Billets • Manganese Phosphate Coated, Flame Hardened Castings or Induction Hardened Billets CAMSHAFT RANGE & SELECTION CHART • Computer Designed Lobe Profiles for Maximum Power • Profiles are Adcole Verified for the Ultimate in Accuracy SEE INDIVIDUAL LISTINGS FOR MORE INFORMATION • Journal Roundness Maintained to Within .0002” STAGE 1 CHARACTERISTICS RECOMMENDATIONS CAMSHAFT APPLICATION CHART IDLE QUALITY: SMOOTH STOCK TOWING: GOOD FOR PULLING HEAVY LOADS NOTES: TORQUE: IMPROVED LOW END, RACING: NOT RECOMMENDED COMMENTS 1600-2000 RPM COMPUTER MODIFICATIONS NOT NEEDED MECH/ DUR @ .050” ADV. DUR. VALVE LIFT LOBE SEP POWER LIFTER BELOW FUEL ECONOMY: YES CONTROLLED PART # HYD STAGE INT EXH INT EXH INT EXH INT EXH RANGE IDLE PART# PART # VEHICLES: AMERICAN MOTORS V8, 1966-92 TRANSMISSION: STOCK AUTOMATIC OR MANUAL 290, 304, 343, 360, 390, 401 C.I. DURATION @ .050’’: COMPRESSION MC1786 HYD 2 204 214 280 290 .448 .472 105 115 1500-4000 SMOOTH 2011 B, D UP TO 195 HYDRAULIC RATIO: 9.0:1 OR LESS COMMENT: GOOD AND LOW MID RANGE TORQUE AND PULLING POWER BUICK V6, 1978-88 STAGE 2 CHARACTERISTICS RECOMMENDATIONS 181, 196, 231, 252 C.I (EVEN FIRE W/INTEGRAL DIST. DRIVE GEAR) MC1731 HYD 1 194 204 270 280 .424 .448 109 119 1000-5000 SMOOTH 969 B IDLE QUALITY: SMOOTH TOWING: GOOD FOR LIGHT PULLING AND RV USE COMMENT: GOOD MILEAGE. -

Compacted Graphite Iron for Diesel Engine Cylinder Blocks
Compacted Graphite Iron for Diesel Engine Cylinder Blocks Wilson Luiz Guesser, Dr Eng - Tupy Fundições and UDESC - Joinville, SC – Brazil – [email protected] Pedro Ventrela Duran, M Sc - Tupy Fundições - Joinville, SC – Brazil – [email protected] Walmor Krause, M Sc - Tupy Fundições - Joinville, SC – Brazil – [email protected] Abstract The recent trends in diesel engines are discussed, and also the consequences in materials selection for engine cylinder blocks. The increasing demand for higher specific power and the need for weight reduction and decrease of emissions require the use of stronger materials for cylinder blocks, opening a promising space for compacted graphite iron (CGI). The properties of CGI are described, in particular those required for engine cylinder blocks (fatigue strength and elastic modulus). Results of mechanical properties from actual castings are presented. As a result of the mechanical properties improvement, some design opportunities are suggested, in order to decrease the weight of the cylinder block. Keywords diesel engines, compacted graphite iron, cylinder blocks 1. Introduction: In a recent paper discussing CGI uses for engine cylinder blocks and heads, S. Dawson (2001) stated that “the Iron Age is just beginning” and we have taken this statement for the present paper. His point of view, added to those from Rizzo (2001), discloses the enormous CGI potential for manufacturing engine components, especially for diesel engines. The growth of diesel engines usage for passenger cars has been remarkable in Europe (see Fig. 1), especially after the introduction of the high-pressure common-rail technology (Buchholz, 2003). This growth is surrounded by requirements as: less fuel consumption, emissions reduction , larger power output and torque, and for passenger cars more compact engines are being required due to space limitations. -
GM Engine Block
A Design Study in Aluminum Casting Aluminum Cylinder Block for General Motors Truck/SUV Engines Design Study Outline -- Introduction -- Designing for Performance Alloy Selection -- Lost Foam Casting Pattern Design Pattern Production Chevy Trailblazer Metal Casting -- Finishing and Quality Assurance -- Lessons Learned and Summary Start the Design Study ! Next Acknowledgment -- The metalcasting design studies are a joint effort of the American Foundry Society and the Steel Founders' Society of America. Project funding was provided by the American Metalcasting Consortium Project, which is sponsored by the Defense Logistics Agency, Attn: DLSC-T, Ft. Belvoir, VA, 22060-6221 Copyright 2004 by the American Foundry Society In cooperation with All rights reserved. GM Powertrain Casting Address comments to: [email protected] Return to AFS Last Modified:August, 2004 by STG Development Home Page A Design Study in Aluminum Castings - GM Cylinder Block Engines for GM SUVs and Trucks The Application -- In 2002 General Motors introduced a new family of Sport Utility Vehicles (Chevy Trailblazer, Buick Rainier and GMC Envoy). In 2004 a family of mid-sized trucks (Chevy Colorado and GMC Canyon) was introduced. ● With the higher vehicle weight and additional load capability, the engineering challenge was to upgrade the powertrain with improvements in power, torque, fuel economy, emissions, and NVH (noise, vibration, harshness ) performance, while keeping the vehicle cost affordable and the weight down. ● A comprehensive engineering study was done to select the best engine configuration, considering V-8, V-6, and Inline 6 designs. The study determined that the Inline design had the following advantages -- simplest design, lowest number of parts, inherently balanced, lowest cost, and best manufacturing flexibility. -
Variable Valve Trains
VARIABLE VALVE TRAINS THE EVOLVING ENGINE Pierburg GmbH Alfred-Pierburg-Straße 1 41460 Neuss Germany www.kspg.com “We’re WORKING ON TOMORROW’s DOUBLY COMPLEMEntaRY AUTOMOBILE ENGINE.” 4-5 UniValve and FlexValve Dr. Dirk Hunkel, Director Business Unit Variable Valve Train Systems, Pierburg GmbH PRECISION FOR HIGH RPM 6-7 UniValve – Design and Function Gasoline or diesel? For years, these arch- inside the combustion chamber while BOTH ROBUst AND VERsatILE 8-9 rivals have charged ahead along their keeping the impact on the fuel con- FlexValve – Design and Function independent respective development sumption to a minimum. The fact that paths, each chiding the other with its variability in the air handling system 715/2007/EG 10 -11 own technical advances. Each system provides advantages for both engines is You want to see it in black and white? has its strengths, but also its weakness- undisputed. But variable valve trains es. The stoichiometric gasoline engine offer even more potential. Keywords are THE EVOLUTION OF YOUR ENGINE 12-13 features a highly efficient and cost displacement on demand, scavenging We work with you to produce a bespoke design. effective after-treatment system thanks and engine braking. to its three-way catalytic converter. But “VaRIABLE VALVE TRAIN SYstEMS ARE NOT 14-17 the fuel consumption has to be im- We’d like to show you what variable SOMETHING YOU JUst GET OFF THE SHELF.” proved. Diesel engines, on the other valve train systems can do. And we’d An interview with Heinrich Dismon, CTO hand, have already reached a very high like to assist you with your decision, efficiency. -

Rebuilding Your First Engine by Joe Mondello
REBUILDING YOUR FIRST ENGINE BY JOE MONDELLO Rebuilding an engine is involved, particular steps must be taken and confidence in the professionalism of your machinist is most important. The first thing is to research the exact cubic inch displacement, year, and type of engine that is in your car. Our technical reference manual will be a great help to you when rebuilding your engine. Always take photos of the engine and engine compartment. Pay special attention to brackets, accessory head bolts, wire looms, AC hoses, belts and special headed or stud type-mounting bolts. Before starting to remove your engine, cover the fenders, front grill and sheet metal with good fender covers or heavy blankets. Then disconnect the battery, fuel lines and drain all the fluids. You should remove the radiator first remembering to disconnect radiator hoses and transmission oil cooler lines to eliminate a big mess of dripping transmission fluid. The carburetor and distributor should then be removed. Connect a chain, engine cradle stop or carburetor plate adapter to engine and prepare to remove the engine. Disconnect engine and transmission mounts and remove the hood. Scribe or use a marking pen around the mounting brackets so hood replacement will be easier. Sometimes the removal of the rear transmission crossover-mounting bar will allow more of a tilt for easier engine and transmission removal. Always block the rear wheels so the car cannot move fore and aft. Always make sure your engine hoist and removing device is securely bolted down and is tight. If you have a 4-speed car, disconnect the clutch cross shaft and all the linkage. -
How to Use a Timer with Your Engine Block
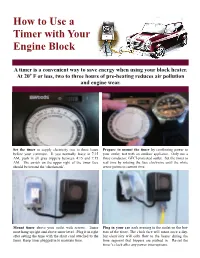
How to Use a Timer with Your Engine Block A timer is a convenient way to save energy when using your block heater. At 20o F or less, two to three hours of pre-heating reduces air pollution and engine wear. Set the timer to supply electricity two to three hours Prepare to mount the timer by confirming power to before your commute. It you normally leave at 7:15 your outlet; test with an outdoor appliance. Only use a AM, push in all gray trippers between 4:15 and 7:15 three conductor, GFCI-protected outlet. Set the timer to AM. The switch on the upper right of the timer face real time by rotating the face clockwise until the white should be toward the ‘checkmark’. arrow points to current time. Mount timer above your outlet with screws. Timer Plug in your car each evening to the outlet on the bot- must hang upright and above snow level. Plug it in right tom of the timer. The clock face will rotate once a day, after setting the time with the short cord attached to the but electricity will only flow to the heater during the timer. Keep timer plugged in to maintain time. time segment that trippers are pushed in. Re-set the timer’s clock after any power interruptions. During a typical morning commute more pollution is created by vehicles idling in driveways than driving on roadways. Block heaters reduce these emissions by warming engine compo- nents, allowing emission controls to work sooner. Vehicle emissions testing performed in Anchorage and Fairbanks proved that block heater use substantially reduces carbon monoxide (CO) and other pollu- tion from cold engines.